
仓储物流作业中动态资源定位精度分析
2022-08-18 02:38刘志钢罗紫君
物流科技 2022年9期
曾 瑞,刘志钢,罗紫君
(上海工程技术大学 城市轨道交通学院,上海 201620)
0 引言
随着现代仓储物流业的蓬勃发展,物流体系不断完善,越来越多的物流活动被集成化管理,如包装、装卸搬运、运输、仓储、流通加工、物流信息等。为了使各项物流活动能够有机结合,达到相互协调的标准化、快速化、一体化的运作效果,实现仓储库区信息数字化、设施设备智能化、资源网络化、日常管理可视化等功能具有重要意义。而上述功能的实现需要借助室内的高精度定位和实时通信传输。
目前,无线定位技术主要通过不同的应用场景区分为室外定位和室内定位。室外定位主要依靠全球卫星导航系统(GNSS),包括GPS、伽利略和我国的北斗卫星导航系统等。虽然基于GNSS的定位技术具有全地域、全时域、精度高、抗干扰等特点,但卫星信号的穿透力较弱,不能穿透建筑物设施,仅适用于户外开放场景,难以满足室内仓储作业中对资源定位的需求。随着室内导航定位需求的不断增长,现在主流的室内定位技术根据传输信号的不同可分为蓝牙、红外、ZigBee、WiFi、RFID和UWB定位技术等。其中,与UWB技术的厘米级定位精度相比,其他五种技术的定位精度为3~10m,且所用信号的抗干扰能力和穿透能力均较弱。因此,UWB技术在高精度室内定位领域有着无可比拟的优势,引起了社会各界的广泛关注,多应用于变电站、煤矿井下、航空、监狱看守所等环境中的人员和设备监管。
一些研究人员认为,超宽带技术的定位精度会受到外部条件的影响。丁震等在测试中发现定位环境中粉尘浓度会对UWB测距产生较大误差。黄波等发现宽度方向的定位误差与最近的传感器与传感器与标签之间的垂直高度呈正相关,并且最大误差易出现在两个UWB锚点之间。孙小文等在对仓储环境下农资物品与自动导引运输车定位的研究中得出结论,农资仓库环境下UWB技术的静态测距与定位精度优于50mm,动态定位精度优于85mm。为了避免现有仓储物流运行环境对仓库内资源定位精度的影响,迫切需要分析其中可能存在的影响因素。
本文针对UWB技术的定位精度选择建筑内部场景进行可控实验,分析资源运动速度,标签密度和信号传播条件对动态资源定位精度的影响,为UWB定位技术在仓储物流作业中的实际应用提供参考依据。
1 试验设置
由于定位设备精度的限制和测量环境的复杂性,测量节点发送的信号参数在空间传输后往往存在误差,使得节点的测量位置偏离实际位置。为了分析UWB定位技术对动态资源定位精度的影响因素,本文从资源运动速度,标签密度及信号传播条件这三个角度,遵循控制变量法,设计了三组可控试验,表1记录了试验工况的详细设置。其中,V、V、V是三种标签的运动速度,ρ、ρ、ρ是三种同时运动的标签的设置密度,LOS(Line of Sight)、NLOS(Non Line of Sight)分别代表无线信号发射端和接收端之间以直达波和非直达波的方式进行传播。此外,每组试验工况分别在信号传输频率为1Hz和5Hz的条件下进行三次重复试验,以防止偶然的数据误差影响试验结果的准确性。试验工况设置如表1所示。

表1 试验工况设置
笔者选取某高校仓储实验室布设四台兼容TOF和TDOA定位算法的U3000-W防水定位基站,空间坐标分别为(51.16,46.21,2.85),(60.13,46.33,2.85),(50.76,36.24,2.85),(59.11,35.73,2.85),(文中坐标单位:m),用于接收定位标签的位置信号,试验场景如图1(a)所示。为了测量动态标签的速度对各个节点定位精度的影响,使用电动轨道车牵引UWB定位标签。由于定位标签设置在物体顶部时得到的数据效果最佳,因此文中定位标签均设置在电动轨道车顶部,如图1(b)所示。电动轨道车和标签的实际运动路径如图2所示。根据电动轨道车的设备规格,可以产生三种不同速度水平的等速运动。试验中研究了速度对动态资源位置估计精度的影响,因此电动轨道车保持等速运动十分重要。试验进行前,以毫秒为精度分别测量了V、V、V三个速度水平下电动轨道车运行15圈的单圈耗时,测量结果如图3所示。其中,三个速度对应耗时的方差分别为0.004s、0.007s和0.012s,较小的方差值表明了电动轨道车等速运动的稳定性和多次实验的可重复性。
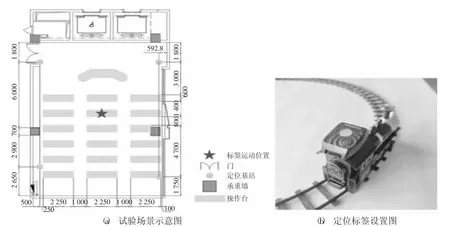
图1

图2 电动轨道车轨道和标签的实际运动路径

图3 V1、V2、V3对应的单圈耗时T1、T2、T3
为了获取UWB定位标签的实际位置,使用激光测距仪确定轨道中心定位点A的坐标(55.54,40.17),在定位点A上方垂直架设一台实验摄像机(1 980*1 080pixel,30fps),记录标签运动轨迹。同时,基于定位点A建立平面坐标系,通过视频处理(Tracker)获得运动过程中UWB标签的实际位置,并与UWB设备的测量位置进行精度分析。
每次试验中,UWB定位标签测量的位置数据均为10圈,从起始点B开始顺时针运动,回到起始点B结束。另外,由于电动轨道车需要加速时间来实现试验所需的等速运动,所以轨道车在UWB设备开始记录之前需要完成两圈预运行来达到目标速度。由于轨道水平放置在实验工作台上,UWB定位标签的高度在试验过程中不会改变,因此本研究仅涉及水平面上的二维定位精度分析。
2 定位精度计算方法
定位精度是衡量UWB定位设备对资源位置测量准确性的重要评价指标。目前,针对无线定位技术常用的指标主要包括:均方误差(MS E)、均方根误差(RM SE)、圆概率误差(CE P)、克拉美罗下界(CR LB)、累积概率分布(CD F)等。鉴于试验中获取的数据为UWB标签在运动过程中的实际位置(X,Y)、测量位置(x,y)以及二者对应的时间t,本文通过计算目标节点的实际位置和测量位置间的距离均方根误差DRMS(The Distance Root Mean Squared)来反应测量位置偏离实际位置的程度,如公式(1)所示。

式中:N为电动轨道车运行中设备测量节点的个数,DRMS的数值越小表明UWB设备定位精度越高。
为了分析试验工况中各条件变量改变后定位精度的变化,引入了相对误差RF的概念,用于量化同组间定位精度的变化程度,如公式(2)所示。

式中:A和a分别对应一种试验工况(表1),RF的数值越大表明该变量产生的定位精度变化程度越大。
3 定位精度试验结果分析
本节中,对资源运动速度、标签密度、信号传播条件三种可能影响UWB定位精度的条件变量进行分析,分别计算了每次试验对应的距离均方根误差(DR MS)和同组试验之间的相对误差(RF)。此外,针对试验中动态标签的实际轨迹和基于UWB技术的测量轨迹进行可视化,便于直接观测测量轨迹的准确程度(实际轨迹为黑色线,测量轨迹为灰色点线)。其中,标签的实际轨迹以3帧(0.1s)作为增量进行坐标取值,测量轨迹以1Hz的频率进行坐标取值。
3.1 标签运动速度。I组试验中,电动轨道车搭载1个UWB标签以三种不同的速度进行匀速运动(V=0.21m/s,V=0.31m/s,V=0.41m/s)。图4记录了三种速度下UWB标签测量位置的DRMS值(a)以及与实际运动轨迹相比的测量轨迹(b)。试验结果表示,在定位不同速度下的动态资源时,UWB技术的定位精度可以控制在0.096m以内。并且数据还表明,定位误差随着速度的增加而减小。适当提高定位对象的运动速度可以有效提高UWB技术的定位精度。从定位轨迹对比图也可以清楚的看出,随着速度的增加,标签的测量轨迹与实际轨迹的一致性更高。

图4
此外,通过计算两个连续速度之间的相对误差发现,速度越高,定位精度收敛的程度越高。当速度从V变化到V时,速度增量为0.1m/s,相对误差为5.56%(1Hz)和5.88%(5Hz),而当速度从V变化到V时,速度增量为0.1m/s,相对误差为7.29%(1Hz)和7.87%(5Hz)。当然,该结论是在本试验速度范围内获得,需要以更多的速度水平进行多次试验才能得出更具有一般性的结论。
3.2 标签密度。在实际的室内仓储资源定位中,通常面临UWB基站和定位标签数量较多的问题,标签在高密度设置条件下,传输的信号之间会相互干扰。II组试验中,电动轨道车在单位面积内分别搭载了1个、3个和8个UWB标签,以V的速度水平保持匀速运动。图5记录了三种标签密度下UWB标签测量位置的DRMS值(a)以及与实际运动轨迹相比的测量轨迹(b)。试验结果表明,随着标签密度的增加,定位误差增大。当定位标签信号传输频率为1Hz时,定位误差均小于0.089m,仍能达到10cm以内的定位精度。而当信号传输频率为5Hz,标签密度从3PCs./m变化到8PCs./m时,定位误差急剧增加,相对误差为36.78%。因此,降低待定位资源的定位标签的设置密度和信号传输频率,可以有效提高对动态资源的定位精度。

图5
3.3 信号传播条件。在室内环境中,由于建筑空间的复杂性和局限性,UWB信号的发射端和接收端之间不可避免地存在障碍物,因此信号无法以直达波的形式传输。UWB信号在此类NLOS传输过程中经常会出现反射、衍射、折射等现象,导致多径效应的出现。当定位信号通过不同的传输路径到达每个接收端时,它们根据各自的数据相互叠加,导致原始信号受到干扰,测量结果出现较大的误差。III组试验中,在电动轨道车的轨道四周设置高2m的隔板,用于模拟NLOS信号传播条件。图6记录了LOS和NLOS条件下UWB标签测量位置的DRMS值(a)以及与实际运动轨迹相比的测量轨迹(b)。试验结果表明,非视距传播会极大地影响UWB技术的定位精度。当动态单定位标签信号传播条件从LOS变化为NLOS条件时,定位误差分别从原先的0.08m(1Hz)和0.082m(5Hz)增长到0.129m(1Hz)和0.151m(5Hz),相对误差分别达到了61.25%(1Hz)和84.15%(5Hz)。因此,将定位标签设置在待定位对象的顶部,减少定位标签与UWB定位基站之间的障碍物,从而避免NLOS传播条件对动态资源定位精度的显著影响。

图6
4 结论
本文基于UWB技术对仓储物流作业中动态资源定位精度的试验研究,详细分析并验证了资源的运动速度、定位标签的设置密度、信号传播条件及信号传输频率等因素对UWB定位精度的影响。
(1)UWB定位技术对于建筑内动态资源的定位精度可以有效保持在10cm左右,能够充分满足仓储物流作业中对于人员、车辆及重要物资和设备的定位监控的精度要求。(2)随着动态资源的运动速度增加,定位精度逐渐提高,动态资源的测量轨迹和实际运动轨迹更加吻合。(3)高密度的UWB定位标签会造成信号的多址接入干扰,出现较大的定位误差。特别在信号传输频率为5Hz,标签密度从3PCs./m增加到8PCs./m时,定位误差增加了36.78%。(4)非视距NLO( )S传播会导致基于UWB定位技术的位置测量结果出现极大的偏移,试验中所测量出的最大相对误差为84.15%。因此,采取资源顶部定位、减少UWB信号发射端和接收端之间的障碍物等方法能大大提升UWB技术对动态资源的定位精度。(5)本研究为UWB定位技术在仓储物流作业中的应用提供了参考依据,同时满足了检测该技术在仓储环境下的定位精度需求,具有较高的理论价值和实际应用价值。
猜你喜欢
军事文摘(2023年4期)2023-04-05
铁道通信信号(2020年10期)2020-12-20
铁道通信信号(2019年8期)2019-10-10
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年4期)2018-11-25
铁道通信信号(2018年8期)2018-11-10
车迷(2018年11期)2018-08-30
铁道通信信号(2018年4期)2018-06-06
海峡姐妹(2018年3期)2018-05-09
