
FAST 主动反射面形状调节的数值模拟
2022-08-12 09:13徐文彬王天娇
高师理科学刊 2022年7期
徐文彬,王天娇
(1.信阳学院 数学与统计学院,河南 信阳 464000;2.信阳航空职业学院 航空管理学院,河南 信阳 464000)
中国天眼——500 m 口径球面射电望远镜(Five-hundred-meter Aperture Spherical radio Telescope,简称FAST),是我国具有自主知识产权的目前世界上单口径最大、灵敏度最高的射电望远镜.它的落成启用对我国在科学前沿实现重大原创突破,加快创新驱动发展具有重要意义[1].
FAST 由主动反射面、信号接收系统(馈源舱)以及相关的控制、测量和支承系统组成.其中主动反射面系统是由主索网、反射面板、下拉索、促动器及支承结构等主要部件构成的一个可调节球面[2].主索网由柔性主索按照三角网格方式构成,用于支承反射面板(含背架结构),每个三角网格上安装一块反射面板,整个索网固定在周边支承结构上.主动反射面共有主索节点2 226 个,每个主索节点连接一根下拉索,下拉索下端与固定在地表的促动器连接,实现对主索网的形态控制[3].索网整体结构、反射面板、主索网结构及其连接见图1.
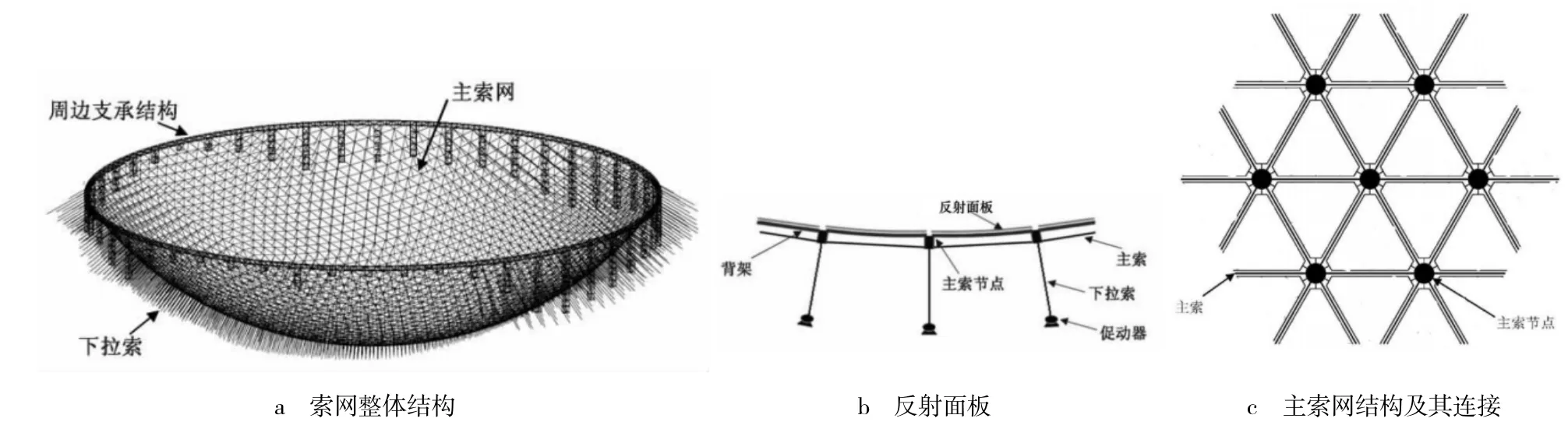
图1 索网整体结构、反射面板、主索网结构及其连接
主动反射面可分为基准态和工作态2 个状态.当处于基准态时,反射面是半径约300 m,口径为500 m的球面(基准球面);当处于工作态时,反射面的形状被调节为一个300 m 口径的近似旋转抛物面(工作抛物面)[4].FAST 在观测时的剖面见图2,C点是基准球面的球心,馈源舱接收平面的中心只能在与基准球面同心的一个球面(焦面)上移动,两同心球面的半径差为F=0.466R(其中:R为基准球面半径,称为焦径比).馈源舱接收信号的有效区域为直径1 m 的中心圆盘[5].当 FAST 观测某个方向的天体目标S时,馈源舱接收平面的中心被移动到直线SC与焦面的交点P处,调节基准球面上的部分反射面板,形成以直线SC为对称轴、以P为焦点的近似旋转抛物面,从而将来自目标天体的平行电磁波反射汇聚到馈源舱的有效区域内[6].
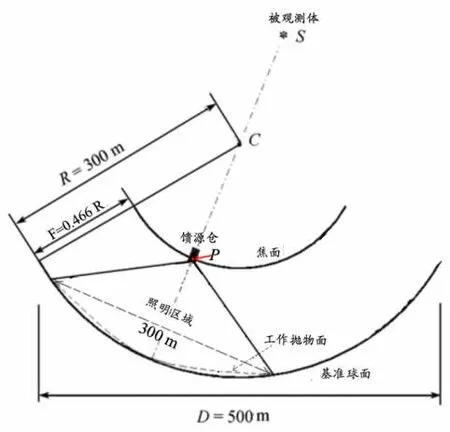
图2 FAST 剖面
1 反射面形状调节模型
模型的建立思路是根据FAST 的主动反射面在基准状态下是球面,建立球面方程,在工作状态下,依据观测天体的位置在FAST 的正上方及馈源舱的焦径比等条件,建立理想抛物面;随着观测天体的位置发生变化,理想抛物面也会随着发生位置的改变[7],通过极坐标变换求得新的理想抛物面顶点坐标,根据理想抛物面的形状、大小、焦径比不发生变化,以及球面、抛物面具有对称性等条件,将新理想抛物面投影区域内各主索节点的位置平移至以原点为圆心的区域内,通过球面方程确定各主索节点的空间坐标,以促动器伸缩沿基准球面径向趋向球心方向为正向,该径向就是通过原点和主索节点的直线方程,将直线方程与理想抛物面方程联立,即可求得抛物面上的交点,交点与主索节点的距离就是要求的各主索节点的伸缩量[8].
1.1 理想抛物面的建立
在基准状态下,反射面是半径为300 m,口径为500 m 的球面,在工作状态下,反射面的形状是一个抛物面,从远处发射出的沿直线传播的信号经过反射面反射汇聚到馈源舱中,也就是说馈源舱正好在抛物面的焦点处[9].假定待观测天体位于基准球面的正上方(见图3),由抛物面的焦点位置P(0,-0.466R)可确定抛物面方程[10],绕z轴旋转可得到理想抛物面方程
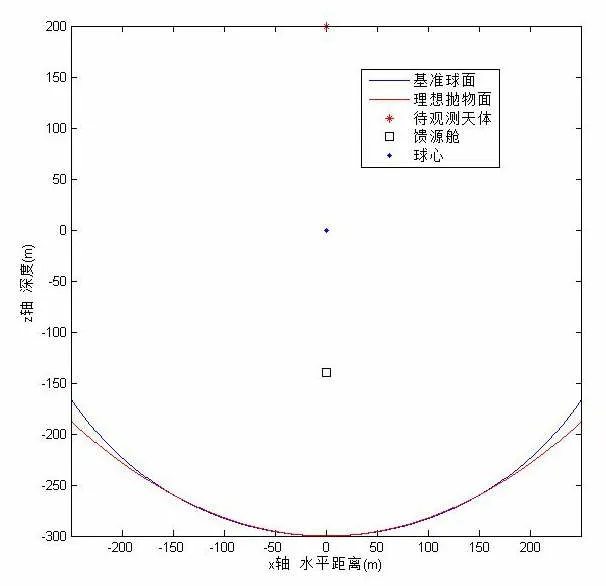
图3 抛物面的剖面

其中:p=2F=2×0.466×R;c=2pR;R=300.抛物面方程是由二维直角坐标系中的抛物线方程x2=2pz+c绕z轴旋转后得到的三维空间的抛物面方程,c是指z轴方向上下平移的距离.
基准状态下的球面方程为

在xoz平面内,抛物线与圆在点x=±150处有2个交点,也就是说,在x∊[-150,150]内是所求的抛物线,这个区域以外,抛物线会在圆的下方,不是将要求的区域.绕z轴旋转后形成的抛物面,在以(0,0)点为圆心,半径为300 m 的圆内形成所要求的抛物面(见图4).
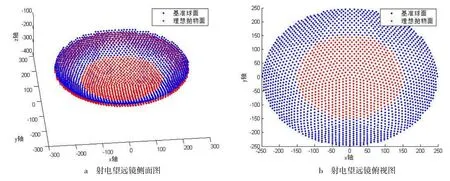
图4 各主索节点通过调节形成的理想抛物面
1.2 反射面板调节模型的建立
当待观测天体S从正上方移动到其他位置时,具体方位用方位角α和仰角β来表示,天体在正上方时确定的理想抛物面,称为初始位置的理想抛物面.
确定新的理想抛物面顶点坐标,将主索节点坐标(0,0,-300.4)作为初始工作抛物面的顶点坐标,新的顶点坐标通过球面的参数方程得到,即

式中:α1,β1分别为抛物面顶点坐标的初始位置与x轴,z轴的夹角;r为顶点坐标到原点的距离.
通过计算,理想抛物面的顶点坐标为(-49.320 0,-36.889 4,-294.018 5),由于馈源舱接收平面的中心只能在基准球面同心的一个球面(焦面)上移动,两同心球面的半径差为F=0.466R(其中R为基准球面半径,称为焦径比),抛物面的顶点位置发生变化,但抛物面的形状、大小、焦距等不会发生变化,只是抛物面的对称轴以原点为固定点,分别与x轴,z轴形成α,β夹角.红色点为在基准球面上要调节为工作抛物面的主索节点(见图5a).所以,求新的工作抛物面各主索节点的伸缩量,可以通过将这些节点的x,y坐标值分别平移49.32,36.889 4 m,至以原点为圆心,口径相同的一个圆内(见图5b).

图5 基准球面上的主索节点形成工作抛物面的位置坐标
以红色点中任一点K(x0,y0)为例,平移之后的新点坐标M(x1,y1)为

由式(2)求得M(x1,y1)在基准球面上对应的z1值,,以点M(x1,y1,z1)与原点(0,0,0)为径向,可确定一条直线

该直线方程与抛物面方程(式(1))有2个交点,其中一个z值大于零,舍去,小于零的那个点为要求的z点,也就是主索节点的坐标N(x2,y2,z2),点M,N间的距离为,即为从基准球面调整为工作抛物面时该主索节点的伸缩量,同样也是点K(x0,y0,z0)处主索节点的伸缩量(见图6).
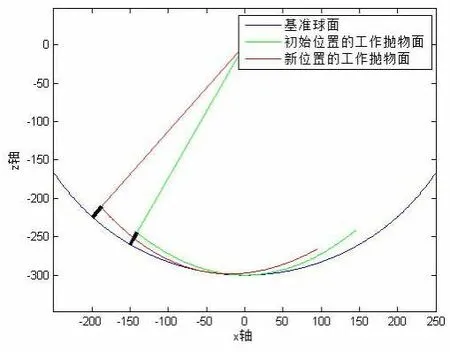
图6 新抛物面的剖面示意图
2 数值结果
中国天眼的主动反射面共有主索节点 2 226 个,反射面板4 300 块,所有主索节点的坐标和编号,促动器下端点(地锚点)坐标、基准态时上端点(顶端)的坐标,以及促动器对应的主索节点编号等数据,来源于2021 年高教社杯全国大学生数学建模竞赛A 题的附件中.
工作态时,反射面的形状被调节为一个 300 m 口径的近似旋转抛物面(工作抛物面),在这个区域内共有710 个主索节点,通过Matlab 程序计算,可求解出该区域内所有主索节点的伸缩量.由于数据较大,这里只显示以新工作抛物面顶点坐标为圆心,口径为300 m 的区域内一小部分主索节点的编号及伸缩量(见表1,已按从小到大排序).
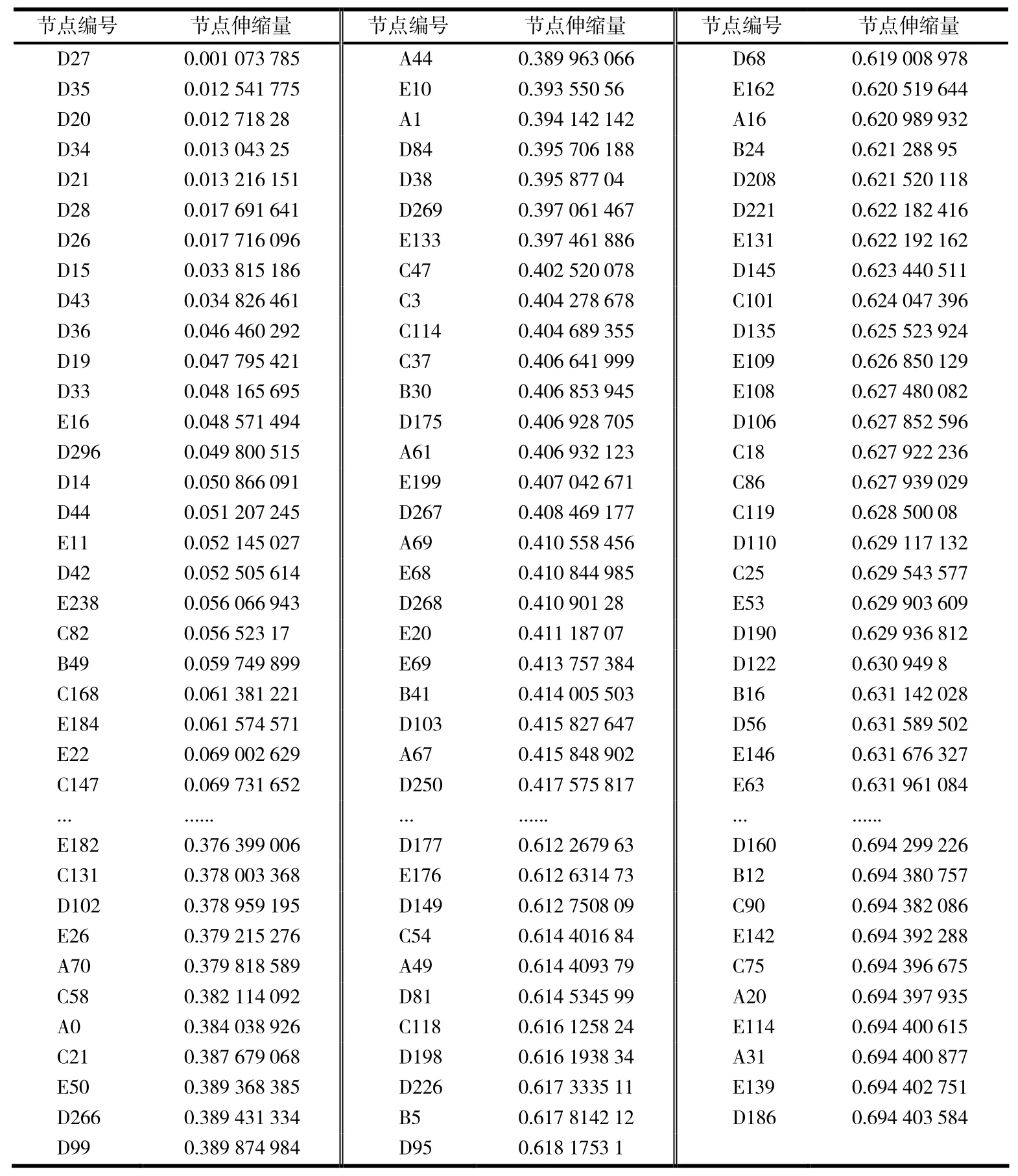
表1 口径为50 m 的区域内主索节点的编号及伸缩量 m
最小伸缩量的节点编号为D27,最小伸缩量为0.001 073 785 m,是最接近新工作抛物面顶点坐标的主索节点,有约1 mm 的调整;最大伸缩量的节点编号为D186,伸缩量为0.694 403 584 m.中国天眼各主索节点下方促动器的径向伸缩范围为-0.6~+0.6 m,伸缩范围为1.2 m.数据结果显示,该区域内的主索节点伸缩量均在可伸缩范围内.
新位置下的工作抛物面剖面图见图7(a 为整个区间的剖面图,x∊[-197.2831,97.812 9],b~d 为小区间的放大图).
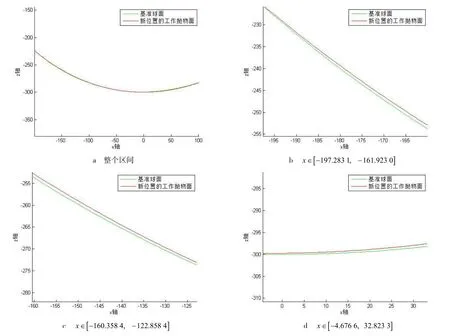
图7 不同区间新抛物面的剖面示意图
3 结语
将中国天眼主动反射面的形状调节问题转化成数学模型,就是球面上有一个抛物面,以球面的圆心为定点,抛物面的顶点在球面上运动,难点在于主动反射面是由小的反射面板组成,相当于球面上离散的点,反射面板在运动的过程中形状、大小不发生变化,相当于离散的点之间的距离不会变.在这些条件的限制下,该模型借助Matlab 程序,能很好地计算出天体在任意方位下,理想抛物面的顶点坐标、反射面300 m口径内的主索节点编号、各促动器的伸缩量等数值.
猜你喜欢
贵州科学(2022年4期)2022-09-05
中国测试(2022年5期)2022-06-10
航天器环境工程(2022年1期)2022-03-11
天文研究与技术(2021年3期)2021-07-15
航天制造技术(2020年5期)2020-11-10
天文学报(2020年5期)2020-09-28
科技视界(2020年19期)2020-07-30
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03
