
线性剪切空间调制快拍成像动态定标技术*
2022-08-12 14:27曹奇志唐金凤潘杨柳江敏蒋思悦张晶贾辰凌樊东鑫邓婷王华华段炼
物理学报 2022年15期
曹奇志 唐金凤 潘杨柳 江敏 蒋思悦 张晶† 贾辰凌 樊东鑫 邓婷 王华华 段炼
1) (南宁师范大学物理与电子学院,南宁 530023)
2) (西安财经大学,中国(西安)丝绸之路研究院,西安 710100)
3) (西安交通大学前沿科学技术研究院,西安 710054)
4) (南宁师范大学,北部湾环境演变与资源利用教育部重点实验室,南宁 530023)
空间调制快拍成像测偏技术能通过单次曝光同时获取目标全部斯托克斯参量.针对传统参考光线定标技术不适用动态环境(如温度变化)下偏振信息精确测量的瓶颈问题,本文提出了线性剪切空间调制快拍成像动态定标技术.该技术采用沿着同一方向剪切的两块改进型萨瓦偏光镜作为核心调制器件,两者厚度比为1∶2,通过快拍获取的干涉图和厚度比,可以推演出核心调制器件产生的空间调制相位因子,由此解调出目标全部偏振信息.该技术最显著的优点是测量目标与系统定标同时进行,过程中不需要任何预知参考目标.本文对该技术方案进行了详细的理论分析,并通过数值模拟和搭建实验平台,验证了该方案的可行性;为空间调制快拍成像测偏技术的定标提供了新思路,有力推动其动态环境下工程实际应用进程.
1 引言
成像测偏技术不仅可获得目标光学辐射的光强度信息,而且可获得目标的偏振信息,显著增加被探测目标场景的信息量[1,2].目标的偏振信息与其自身的介电常数、粗糙度、组织结构、含水量等有密切关系[3].该技术在空间遥感、环境监测、生物医学[1,4,5]等领域具有广阔的应用前景,受到了国内外研究人员的重视.它是当今偏振成像领域研究的热点之一[1,6−13].
成像测偏技术按照调制方式不同,分为分时型和快拍型(snapshot,有学者称为同时或快照式)[1,2].分时型一般包含有机械转动(如旋转玻片等)或相位延迟调制(如液晶等)部件,虽然原理简单,获得的偏振图像空间分辨率高,但系统中含有活动部件和需要多次测量,这限制了其测量精度和应用范围.快拍型一般包括:分振幅、分焦平面、分孔径和空间调制型,图像之间的精确配准是前三者快拍型成像测偏技术不可忽视的问题.空间调制快拍成像测偏技术是采用不同的载频将目标的全部4 个斯托克斯(Stokes)参量分量(S0,S1,S2和S3)编码到一帧干涉图中,通过一次探测获取全部Stokes参量[6−13].与分振幅、分焦平面和分孔径快拍成像测偏技术相比,空间调制快拍成像测偏技术仅需对单张干涉图解调,无需配准.此外,该技术具有结构简洁、直光路、易配准和微型轻量等优点,是近十年快拍成像测量技术的重点方向之一[6−13].
国内外研究学者基于不同核心调制器件(楔形棱镜[7]、萨瓦偏光镜[8,9]、偏振光栅[6]和改进型萨瓦偏光镜(modified Savart polariscopes,MSP)[10−12])提出了优点各异的技术方案.但在反演目标偏振信息时,一般采用参考光线定标方法:在每次测量目标前,须先测量一些已知偏振态(0°和45°线偏振光)作为参考数据,通过将未知目标的数据与参考数据进行归一化,消除空间调制相位因子的影响,重构出未知目标的偏振信息.参考光定标技术前提假设:测量时系统状态与定标时系统状态完全一样.然而,在实际动态环境中(如温度不稳定),快拍测偏系统状态是动态变化的.用测量目标前系统状态去定标测量目标时系统的状态,必然导致动态的测量误差,显然传统参考光线定标技术不能满足实际动态环境下的应用需求.
受到通道谱调制动态定标方法启发[14−16],本文提出了线性剪切空间调制快拍成像测偏技术的动态定标方法.该方法无需将已知偏振态作为参考数据,在测量的同时实现系统定标,极大扩展了空间调制快拍成像测偏技术应用场景,有利于促进该技术工程实践应用.本文第2 节是光路设计;光学测量和动态定标原理在第3 节;数值模拟和实验室原理验证分别在第4 节和第5 节;第6 节是结论.
2 光路设计
图1 是基于MSP 的线性剪切快拍成像测偏技术(one-dimension modulation snapshot imaging polarimeter using modified Savart polariscopes,MSP-OMSIP)光学设计示意图,改进型萨瓦偏光镜MSP1和MSP2的主截面平行于xoz平面,其中MSP2的厚度是MSP1厚度的2 倍;两者之间夹着的半波片(half wave plate,HWP)快轴方向与x轴方向成22.5°;分析器A 的偏振化方向与x轴方向成45°.目标出射的光首先经准直后平行入射,经滤光片后变为准单色光,入射经过MSP1,分成振动方向在xoz面和yoz面内正交垂直的两束线偏振光;然后这两束光经过HWP,两束光的偏振方向旋转45°,垂直入射经过MSP2后,分成四束线偏振光;最后经分析器A 和成像镜L2,目标图像与干涉条纹叠加在电荷耦合器件(charge-coupled device,CCD)上.
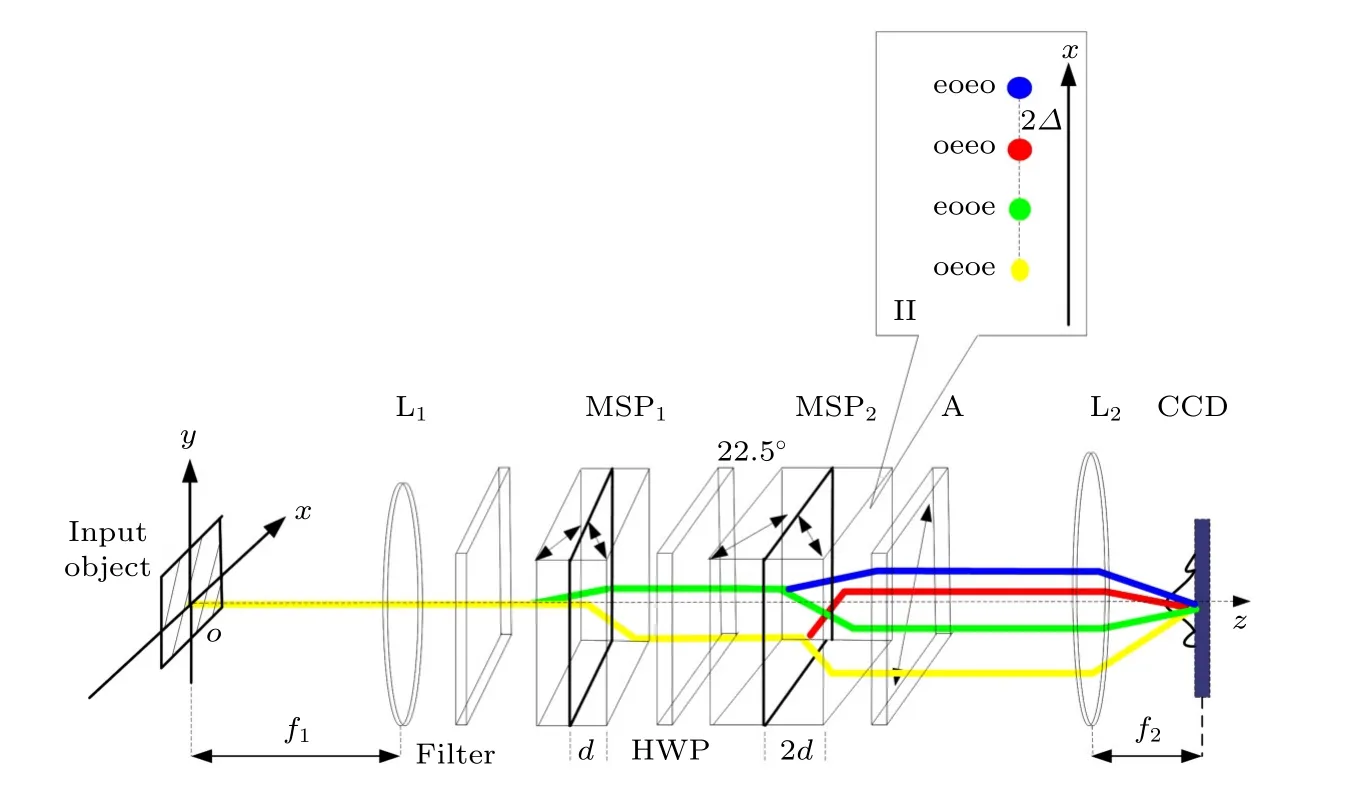
图1 MSP-OMSIP 光学设计示意图Fig.1.Optical layout of MSP-OMSIP.
3 光学测量和自定标原理
利 用Stokes参量-Mueller 矩阵形式,分 析MSP-OMSIP 的探测原理.设入射光的Stokes 参量为S0,in,用一个 4×1 的矩阵表示,则出射光的Stokes 参量S0,out等于光学系统的Mueller 矩阵M乘以入 射光 的Stokes参量,即S0,outMS0,in.基于本测量系统的基本结构和探测原理,入射光经过系统的矩阵传输方程可表示为

其中MP2(45°),M2,MH(22.5°)和M1分别表示分析器A、改进型萨瓦偏光镜MSP2、HWP 和改进型萨瓦偏光镜MSP1的Mueller 矩阵[5].
通过计算(1)式,可得到焦平面(FPA)上光强IS0,out,S0,S1,S2和S3是4 个斯托克斯(Stokes)参量分量,其中ΩΔ/(λf)是空间载频,λ是入射光的波长,f是成像镜的焦距,Δ是萨瓦偏光镜MSP1的单板横向剪切量[11].对光强I进行傅里叶变换获得如图2所示的7 个峰,这些峰中包含不同的Stokes参量.由于傅里叶变换的对称性,只需分别对C0,C1和C2通道采用二维滤波器进行截取,再进行反傅里叶变换ℑ,来重构S0,S1和S23的偏振信息:
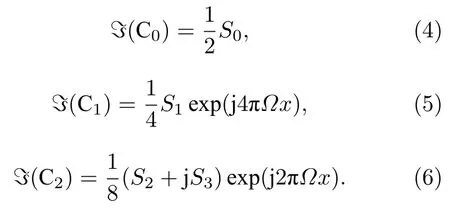

图2 干涉图频谱通道示意图Fig.2.Spectrum channel of interferogram.
为了重构未知目标的Stokes 参量,需进行系统定标来解调相位因子 exp(j2πΩx) 和 exp(j4πΩx).传统方法采用参考光线定标技术[6]:在每次测量目标前,先采集已知偏振态(偏振方向0°和45°线偏振片)干涉图作为参考数据,来消除这些相位因子.然而在工程实践中,经常需长时间地对目标或者目标场景进行观测,环境状态(如温度)一般是不稳定的,快拍测偏系统的状态也是动态变化的.用测量目标前的系统状态去定标测量目标时的状态,必然导致动态的测量误差.为此,本文提出了线性剪切空间调制快拍成像动态定标技术.自定标原理为:令延迟相位φ12πΩxi,φ24πΩxi,
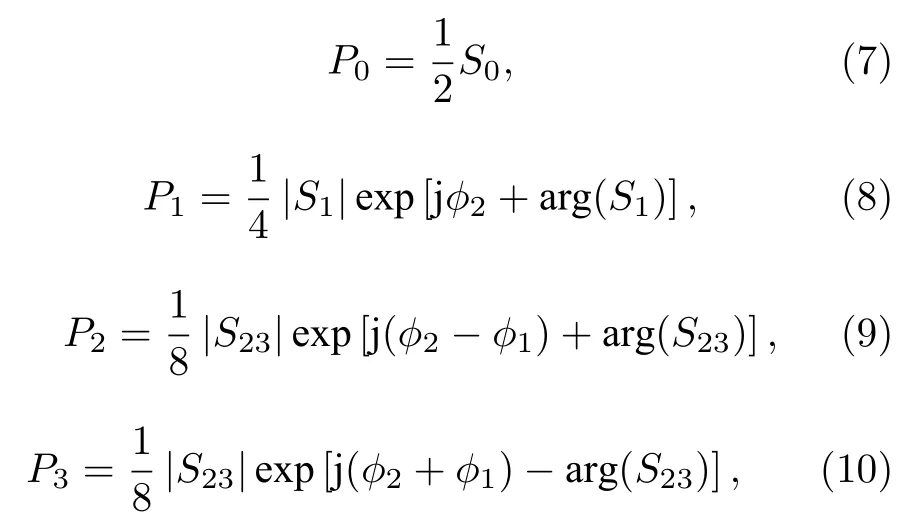
其中 arg(S1)是0 或 π .由(7)式—(10)式可得
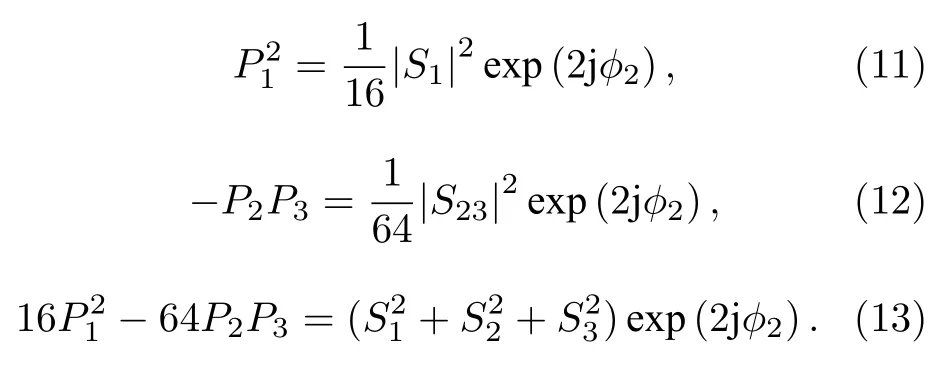
由于(13)式的绝对值等于完全偏振光成分中的光强的平方,总是一个大于0 的值.因此,φ2可以通过对(13)式求复角得到.由于MSP2的厚度是MSP1厚度的两倍,可以求出φ1是φ2的一半.求出φ1和φ2后,通过(4)式—(6)式可以反演出:
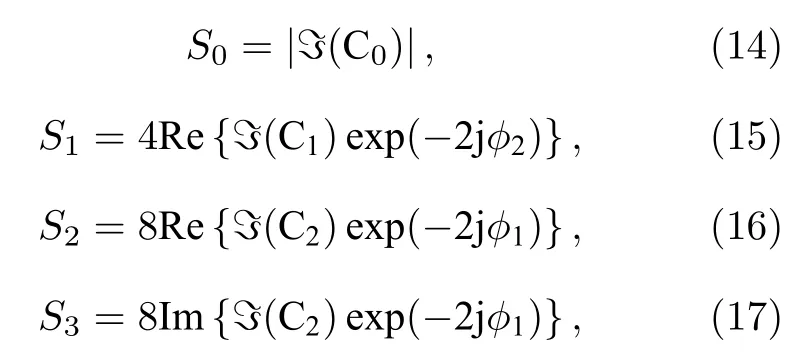
其中Re 和Im 分别是对复数取实部和虚部操作.
4 数值模拟
采用计算机仿真实验验证MSP-OMSIP 理论分析的正确性.仿真采用的系统参数为:f280 mm,CCD 分辨率为 1024×1024,像元尺寸为5.3 µm,空间载频设为0.05.图3 为输入系统的Stokes 目标图像.图4 为CCD 上模拟得到的干涉图.可以看到目标图像和清晰的干涉条纹.图5 为图4 的傅里叶变换频谱,可以看出7 个分离的峰(通道)一字排开,这7 个峰(通道)分别包含4 个Stokes 信息.使用二维滤波器进行滤波,通过对通道C0,C1和C2进行反傅里叶变换,采用第3 节给出的动态定标原理算法,可以反演获得目标图像(如图6 所示).
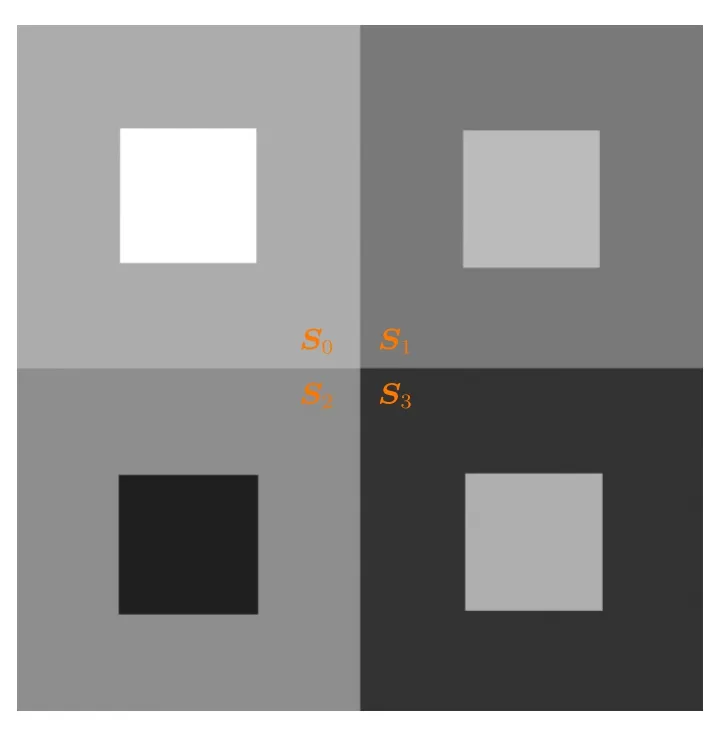
图3 输入系统的Stokes 目标图像Fig.3.Enter the Stokes target image for the system.
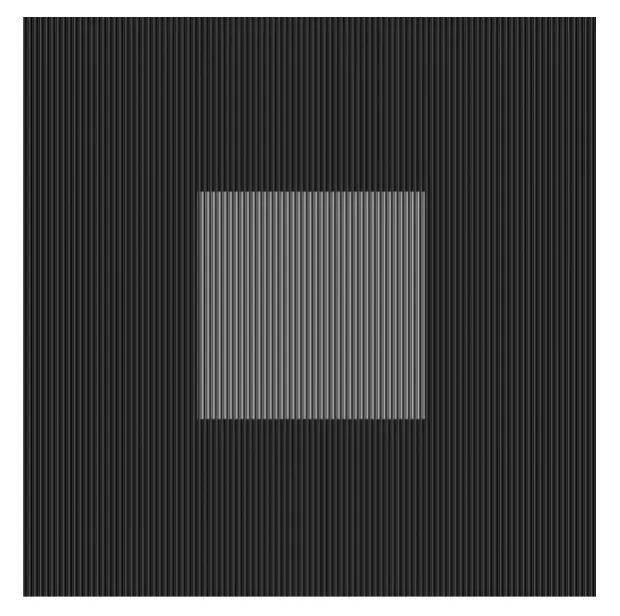
图4 CCD 上模拟得到的干涉图Fig.4.Interferogram simulated on CCD.
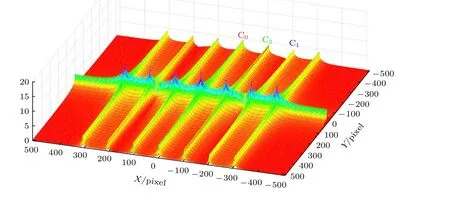
图5 图4 的傅里叶频谱Fig.5.Fourier spectra of Fig.4.
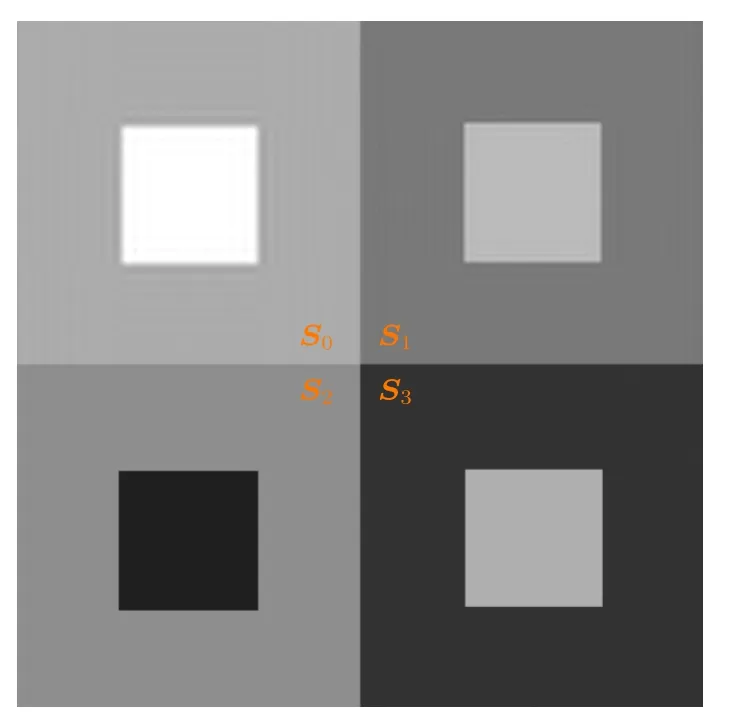
图6 采用动态定标算法反演的目标图像Fig.6.Reconstructed target image inversion using the dynamic calibration.
结构相似指标(SSIM)是一种衡量两张图像相似程度的指标.当两张图像中的一张为无失真图像(如输入目标图像),另一张为重构图像,二者的结构相似性可以看成是重构图像的质量衡量指标.SSIM 取值在0—1 之间,该值越大,表示两图像的相似性越高,当数值为1 时,则两图像完全相同.由表1 中数据可知,4 个Stokes 分量SSIM 的系数均在0.925 以上,表明很好地重构了目标图像.值得注意的是,由(4)式和(5)式可知Stokes 参量S0和S1分别从C0和C1通道中得到,由(6)式可知S2和S3共用一个通道C2.从表1 可知单独占有一个通道的(如S0和S1)的SSIM 比多个Stokes 参量(如S2和S3)共享一个通道的SSIM 高,这是因为共享通道使得信号之间更易产生串扰.此外,由(2)式可知,S23的调制系数只是S1的1/2,是S0的1/4.换言之,各通道能量分配比例不一样,在相同的噪声下,信噪比也不一样,分配能量少的信噪比相对低,反演时图像质量相对就差一些[17].
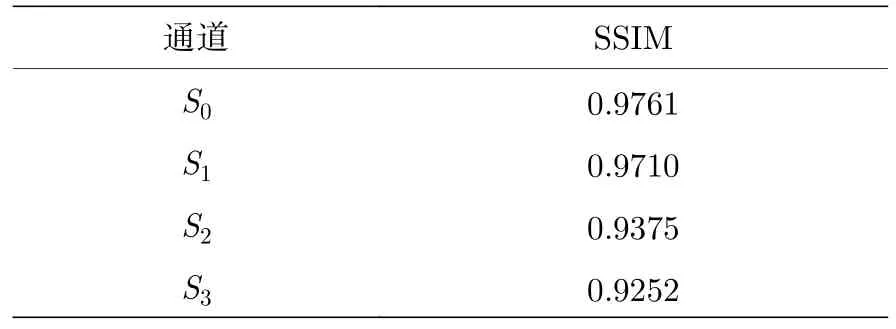
表1 各个通道的SSIMTable 1.SSIM of each channel.
5 原理验证实验
验证实验装置示意图如图7 所示,该实验选用实验室现有元件(激光器、偏振片、透镜、MSP、半波片以及CCD 等)搭建,并非按照一定指标设计加工,所以其参数是由所选仪器组成的装置决定.实验光源采用索雷博HNL210 LB 型激光器,其中心波长为632.8 nm;扩束器由L1(f=20 mm)和L2(f=150 mm)组成.MSP1和MSP2尺寸分别为25 mm×25 mm×8 mm和25 mm×25 mm×16 mm,其中MSP2厚度是MSP1的2 倍.半波片由曲阜师范大学激光研究所生产,其中心波长是632.8 nm;四分之一波片由卓立汉光提供,其中心波长是632.8 nm;L3和L4的焦距均为80 mm.CCD 是索雷博DCC3240 M 型,其分辨率为 1024×1280,像元尺寸为5.3 µm×5.3 µm.
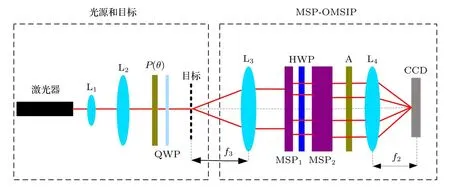
图7 MSP-OMSIP 原理方案验证实验示意图Fig.7.Schematic diagram of verification experiment of the MSP-OMSIP principle scheme.
图8 为MSP-OMSIP 快拍获取的干涉图,干涉条纹叠加在目标图像上,这表明目标的偏振信息已编码在干涉图中.通过本文所提出的动态定标反演算法,可获得如图9 所示的偏振图像,可以看出,自定标算法很好地解调出了目标的信息.
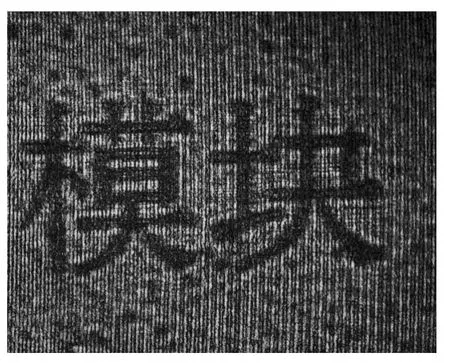
图8 快拍成像测偏实验获得的干涉图和目标像Fig.8.Interferograms and target images obtained from snapshot imaging polarimetry experiments.

图9 通过反演算法获得图8 的偏振图像Fig.9.Processed polarization data of Fig.8.that calculated by the inversion algorithm.
6 结论
本文提出了一种线性剪切空间调制快拍成像动态定标技术,以MSP 为核心调制器件,给出了光学系统设计方案,推导出动态定标数理模型;并采用计算机仿真和搭建实验平台验证了线性剪切空间调制快拍成像动态定标技术的可行性.传统参考光线定标技术标定的是测量目标前系统的状态,该技术保证目标被精确测量的前提条件是:光学系统在测量过程中,其状态始终不变,即不适用于动态环境下目标的测量,这严重限制了空间调制快拍成像技术的使用范围.本文提出的动态定标技术,在测量目标的同时实现了系统状态定标,极大地促进了空间调制快拍成像技术工程应用进程,为动态环境下空间调制快拍成像技术定标提供了新思路.
猜你喜欢
聊城大学学报(自然科学版)(2022年4期)2022-08-22
纺织标准与质量(2022年2期)2022-07-12
航天器工程(2022年3期)2022-07-12
科学导报(2022年36期)2022-06-24
成都信息工程大学学报(2022年2期)2022-06-14
国际太空(2022年1期)2022-03-09
今日农业(2021年19期)2022-01-12
重庆理工大学学报(自然科学)(2021年11期)2021-12-14
现代职业教育·高职高专(2020年10期)2020-01-05
航天器工程(2019年2期)2019-05-10
