
空战模式演变与隐身空战形态发展分析
2022-08-11 01:31:46张俊宝
航空兵器 2022年3期
陈 辛, 张俊宝
(1.中国空空导弹研究院,河南 洛阳 471009; 2.航空制导武器航空科技重点实验室,河南 洛阳 471009)
0 引 言
OODA 决策循环是美国空军飞行员约翰·博伊德凭借其战斗机飞行员的经验和对能量机动性的研究总结出的作战方法和规律,能较为清晰地描述整个作战战术全过程:“观察(O)-定位(O)-决策(D)-行动(A)”。OODA决策循环的基本观点是:武装冲突可以看作是敌对双方互相较量谁能更快更好地完成“观察-判断-决策-行动”的循环程序。双方都从观察开始,观察自己、观察环境、观察敌人。基于观察,获取相关的外部信息,根据感知的外部威胁,及时调整系统,做出相应对策,并采用相应行动。博伊德认为,敌我的这一决策循环过程的速度显然有快慢之分。己方的目标应该是率先完成一个OODA 循环,同时通过迅速采取行动以干扰、延长、打断敌人的OODA循环。
本文将博伊德的单机空战OODA循环应用到空战模式演变与发展的研究中,将空战体系中OODA循环进行定义,第一个“O”代表Observe(观察)就是运用传感设备和网络进行情报收集,包括预警探测的信息、目标位置信息、目标状态信息等; 第二个“O”代表Orient(定位)就是对收集到的情报进行分析,对目标进行更定位和确认; “D”代表Decide(决策)即基于情况判断定下决心; “A”代表Action(行动)即根据做出的决策,采用相应的武器发起攻击。
1 空战模式演变与发展
1.1 第一阶段(1910s~1950s)
人类都将最新的技术首先应用于战争,1903年12月17日,美国的莱特兄弟驾驶“飞行者1号”完成首次空中飞行。1913年,墨西哥革命中,飞行员Phil Rader和Dean Ivan Lamb驾驶飞机,分别使用左轮手枪向对方射击,虽然双方都未能击中对方,但世界上第一次空战就在手枪声中拉开了序幕。在随后几个月爆发的第一次世界大战中,飞机之间的空战成为常态。1914年8月25日,法国飞行员Roland Garros和Lt.de Bernis驾驶Morane Parasol飞机,成功击落一架德国飞机,机上两人有一人被击伤,成为有记载的第一次取得战果的空战。
第一次世界大战爆发后不久,工程师们便将大量的武器搬上飞机,机枪作为重要的武器在空战中开始广泛使用,开创了空战的枪炮时代,空战双方使用枪炮进行对抗。1915年4月1日,法国飞行员用固定在机头上的机枪击中了德国一架观察飞机,开创了飞机对飞机空战的先例,标志着枪炮时代空战的开始。
用OODA循环来分析单机对抗下的空战过程,“O”—“观察”是通过飞行员肉眼实现,即飞行员通过对空观察发现敌机。根据科学研究,在没有引导信息的条件下,飞行员肉眼发现目标最大距离一般在5 km左右。“O”—“定位”也是通过飞行员用肉眼实现的,即飞行员死死盯住要攻击的目标不动。“D”—“决策”是通过飞行员大脑实现的,当飞行员驾驶飞机距离目标一定距离时决定是否要开火。“A”—“行动”是通过机炮实现的,即飞行员按压扳机发射炮弹,炮弹攻击目标。
1.2 第二阶段(1950s~1980s)
1.2.1 地面雷达的诞生和运用对空战的影响
体系是指由多个系统组成在一起,通过协同合作完成某项功能或任务。第一阶段的空战,是飞机(飞行员)这个单一系统之间的对抗,不能称之为体系对抗。真正意义上的大规模体系化空战,发生在1940年第二次世界大战期间英德之间的大不列颠空战,英国首次将地面雷达系统引入了空战。
早在1936 年,英国人在本国东南海岸修建了5 部“沃森·瓦特”雷达,每部发射天线高120 m,接收天线高80 m,雷达探测距离达到120 km,至此,被称为“本土链”的雷达警戒链雏形已成,如图1所示。在大不列颠空战期间,英国利用“本土链”对整个英国东部空域进行监视,当发现德国飞机后,立即通报地面指挥所,指挥战斗机起飞,并引导其对德军飞机进行拦截。

图1 “本土链”米波预警雷达Fig.1 “Home chain” metric wave early warning radar
实战证明,这种“本土链”引导战斗机截击的战法成功率达到90%以上,极大减少了英国空军盲目起飞升空待战所带来的燃料和飞行员体力上的巨大消耗。经过不断的改进,“本土链”指示的目标位置精度已经可以达到3 km以内。科学研究表明,飞行员在无引导条件下,肉眼搜索可以发现目标的距离最大在5 km左右; 在受到引导信息下,对空中目标观测距离最大可以达到20 km,相对于漫无目的地搜索提高了4倍。“本土链”提高了英国飞行员在遭遇时先敌发现的概率,在很大程度上弥补了飞机和飞行员数量不足的劣势,使纳粹德国轰炸机的战损率则从1940 年12 月的0.5%暴涨到1941 年5 月的7%,远远超出了德军的可承受范围。
1.2.2 第二阶段空战体系的OODA循环分析
从整个作战过程来看,地面雷达的引入使得OODA循环中“O”—“观察”环节大幅度提升目标发现的距离,将观察范围由人眼几千米提高到上百千米,并且引导飞行员肉眼在更远的距离上锁定目标,促使“O”—“定位”的距离更远,使己方在空战中更具优势。这一时期的“D”—“决策”还是依靠飞行员,“A”—“行动”还是采用机炮。
正如文章之前所述,攻防双方都会采用各种手段去迟滞对手的OODA循环过程。伴随着雷达的出现,围绕雷达的干扰和抗干扰就应允而生。1939年,纳粹德国为查明英国的雷达部署情况和电磁频谱特征,派出一架携带高灵敏度测量设备的飞艇,飞往英国海岸对英国雷达进行空中电磁侦察。1940 年9 月,德国在法国加来附近的库普尔山上建立了一座地面雷达干扰站,发射功率达1 000 kW,企图干扰“本土链”的雷达回波。
1.3 第三阶段(1980s~20世纪初)
1.3.1 预警机的出现使“O”—“观察”更远、更广
把雷达“搬到”空中,这样就可以对整个空战战区进行监视,解决了地面雷达对低空/超低空飞行目标的探测问题,为空中的进攻部队提供情报和信息支持。这一想法促使了一种新型飞机——预警机的出现。1944年,美国海军研制出世界上第一款舰载预警机TBM-3W,如图2所示,受时代限制,该机没有指挥管制能力,只能算是空中雷达警戒机。

图2 舰载预警机TBM-3WFig.2 Carrier-based early warning aircraft TBM-3W
真正意义上的现代预警机的典型代表是美国E-2系列预警机和E-3预警机,如图3所示,这类飞机不仅具有警戒监视作用,还具备空中部署、调度、协同等综合指挥控制作用。

图3 E-2预警机(左)和E-3预警机(右)Fig.3 E-2 early warning aircraft (left) and E-3 early warning aircraft (right)
地面雷达探测距离和范围受地球曲率限制,而预警机飞行高度高,探测距离和范围相对于地面雷达更远更广。以俄罗斯A-50U预警机为例,如图4所示,其对空中目标的探测距离最大可以达到600 km以上,是典型地面雷达探测距离的1.5倍,并且可以对超低飞行目标进行有效探测。地面雷达生存力较差,容易被敌方侦察和打击。预警机可以看作是可移动的空中雷达,可随战斗机一起行动,更适合进攻性制空作战。

图4 预警机和地面雷达探测范围对比Fig.4 Comparison of detection range between early warning aircraft and ground radar
1.3.2 机载雷达使“O”—“定位”距离更远
对空探测的机载雷达诞生于第二次世界大战期间。1941年,英国皇家空军在Bristol Beaufighter 156型重型战斗机上装备了MK.IV雷达,主要用于阻击德国夜间轰炸机,其探测距离在120 ~5 500 m,如图5所示。

图5 Bristol Beaufighter战斗机和 AI MK.IV机载截击雷达Fig.5 Bristol Beaufighter fighter and AI MK.IV airborne interceptor radar
20世纪50年代中期至60年代,随着半导体器件的广泛应用和雷达理论的深入研究,采用了单脉冲跟踪、合成孔径、脉冲压缩和频率捷变等技术,使雷达的抗干扰能力、作用距离、分辨力和测量精度有了显著提高,应用范围也随之扩大。如当时F-5战斗机装备的APQ-153雷达的探测距离已经可以达到20 km,如图6所示。该雷达的改进型APQ-159型雷达的探测距离已经可以达到37 km,信息精度达到火控级水平。

图6 APQ-153机载雷达Fig.6 APQ-153 airborne radar
20世纪70年代,行波管发射机、固态发射机相继问世,微电子器件的出现和数字技术的进步,大大促进了机载雷达技术的进步,为机载雷达小型化起了重要作用。由于微电子技术、大规模集成电路的发展,数字电子计算机、微处理机载机载雷达中的应用,提高了雷达的信息处理和自适应能力,出现了多功能、多目标雷达。这个时代最为经典的机载雷达代表就是APG-66雷达,该雷达服役于1978年,装备在F-16A/B飞机上,探测距离可以达到150 km。进入20世纪80年代,机载相控阵雷达获得初步成功,直至20世纪90年代中期相控阵雷达开始在战斗机上装备。F-22 飞机装备的APG-77型雷达是这类装备的典型代表,APG-77雷达对空中目标探测距离可达到190~240 km。APG-66和APG-77机载雷达,如图7所示。

图7 APG-66机载雷达(左)和APG-77机载雷达(右)Fig.7 APG-66 airborne radar (left) and APG-77 airborne radar (right)
1.3.3 超视距空空导弹使“A”—“行动”距离更远
1943年6月,由德国Kramer博士主持开展世界第1型空空导弹X-4的研发工作,如图8所示。X-4导弹有效攻击距离达到1 500~4 000 m,远超过机炮攻击距离(约300 m),使战斗机可以在轰炸机的机炮范围以外对其进行攻击,并提高攻击的精准度。X-4导弹并没有投入实战。

图8 世界第1型空空导弹X-4Fig.8 The world’s first air-to-air missile X-4
位于加利福尼亚州因约肯镇的美国海军军械试验站(Naval Ordnance Test Station, NOTS)自1946年开始,在威廉·布尔戴特·麦克莱恩博士的领导下,开始研究可对付机动目标的红外制导空空导弹,即AIM-9“响尾蛇”空空导弹,如图9所示。“响尾蛇”导弹于1953年11月首次对空中无人靶机进行射击,在1954~1955年间完成了51次实弹测试,之后完成验收和开始批生产。首款AIM-9B导弹于1956年进入美国空军服役。AIM-9B导弹的射程为2 km左右,大大超出了机炮的杀伤区,扩展了战斗机的攻击范围,使得在空战中被“咬尾”的一方,处于危险的境地。
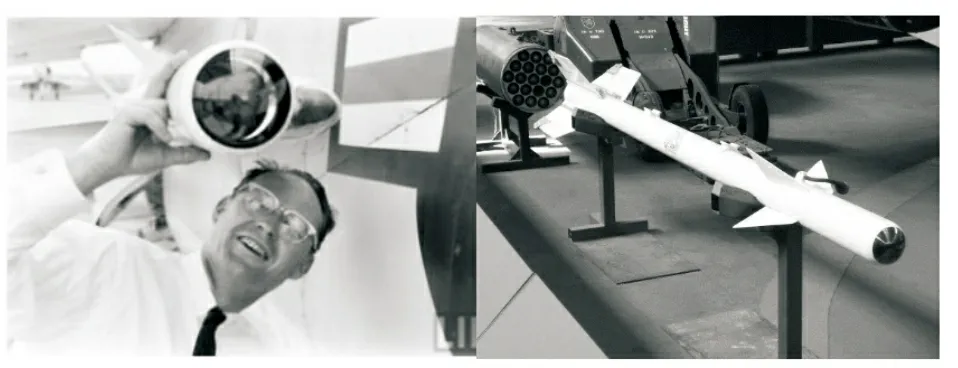
图9 “响尾蛇之父”威廉·布尔戴特·麦克莱恩博士和AIM-9B导弹Fig.9 “Father of Sidewinder” Dr. William Bourdette BMcClain and AIM-9B missile
1958年9月24日,在中国温州湾爆发的一次空战中,一架F-86战斗机发射AIM-9B“响尾蛇”空空导弹,击落一架米格-17战斗机,取得空空导弹历史上的首个实战战果。这次战果表明空空导弹正式登上了空战历史舞台。
进一步扩展空空导弹的射程一直是工程人员努力的目标,在空空导弹大发展时代就出现了很多射程超出视距的空空导弹,但受限于当时制导方式和机载雷达的局限,且人们对超视距空战的认识有限,超视距空空导弹并没有成为当时的主流。
随着机载雷达的快速发展,利用机载雷达测量的信息对导弹进行制导,为超视距空空导弹开创了新的发展思路。如图10所示, 最早的超视距空空导弹是美军的 AIM-7“麻雀”系列导弹,通过半主动制导方式进行制导飞行,最终实现了空空导弹的超视距攻击能力,最大射程达到30 km。此后,美军又发展了装有主动雷达导引头,并具有发射后不管能力的新一代超视距空空导弹AIM-120。AIM-120导弹是具备全天候、全向攻击的主动雷达制导导弹,导弹外形和AIM-7麻雀导弹相似,但翼展更小,重量是麻雀导弹的2/3,早期的型号最大射程达到70 km以上。从入役以来,AIM-120导弹实战发射数超过10次,命中率达到60%以上。

图10 AIM-7导弹(左)和AIM-120导弹(右)Fig.10 AIM-7 missile (left) and AIM-120 missile (right)
1.3.4 第三阶段空战体系的OODA循环分析
从这一阶段空战体系的变化来看,预警机、机载雷达和超视距空空导弹的发展、装备和成熟应用,各种传感器大幅延伸了人类感官距离,导弹武器不断延伸能量投送距离,使得空战体系的OODA循环发生了颠覆性变化。在空战体系中OODA循环中,“O”—“观察”环节,预警机的探测距离和范围相对于地面雷达有了大幅度提升和扩展; 战斗机机载雷达的应用,促使“O”—“定位”,即锁定和瞄准目标的距离从人眼的5 km提高到200 km以上; 空空导弹,特别是超视距空空导弹的应用,使得“A”—“攻击”的距离得到大幅度提高,从枪炮时代的300 m提高到100 km以上。
体系支持下的超视距空战的出现,使得空战的信息化出现了质的飞跃,表现在两个方面:一是信息获取的方式更加丰富,除了通过飞行员的观察以外,大量的信息是通过机器和设备来完成的,并成为空战中获取信息的主体。二是以高速数据链为代表的信息化链路将传感器与传感器、系统与系统、系统与武器精密的联系在一起,构成了一个完备的信息化空战体系,将空战带入了一个全新时代。
无论是预警机、机载雷达、超视距空空导弹等,采用了雷达技术进行远程探测,雷达容易受到电子干扰,这一阶段阻滞甚至阻断OODA循环的手段主要是电子战,通过电子干扰、欺骗、阻塞等方式方法,实现对各类传感器的有效干扰。
1.4 第四阶段(20世纪初至今)
隐身飞机的出现打破了以预警机为核心的空战体系平衡。隐形战斗机是指雷达一般探测不到的战斗机,其原理是指战斗机机身通过结构或者涂料的技术使得雷达反射面积尽量变小。世界上第1型隐身飞机是F-117“夜鹰”战斗轰炸机。2005年12月,美国空军宣布其第1款隐身空中优势战斗机F-22达到了初步作战能力,标志着空战进入了隐身时代,如图11所示。

图11 F-117战斗轰炸机(左)和F-22战斗机(右)Fig.11 F-117 fighter-bomber (left) and F-22 Fighter (right)
对于以预警机为核心的现代空战体系而言,这一体系是一个优势突出、薄弱点也突出的体系,“O”—“观察”一般由一架预警机完成,预警机成为整个体系的薄弱环节,当预警机受到攻击或干扰丧失能力时,整个体系面临崩溃的局面。
隐身战斗机的出现打破了现有以预警机为主体的空战体系平衡。预警机对非隐身的第三代战斗机探测距离一般在400~500 km,而对F-22隐身战斗机的探测距离减少到200 km以内。这意味着预警机已经暴露在隐身战斗机的超视距空空导弹打击范围以内,以预警机为核心的空战体系平衡被打破。隐身技术还使机载雷达和空空导弹导引头作用距离都大幅降低,使得整个作战体系全面失能。
虽然第四代隐身战斗机没有空战实战记录,但从美军红旗军演中能够看出其地位和作用。2019年,美军“红旗19-1”空战对抗中,扮演蓝军的F-35隐身战斗机在空战中共击落145架红军非隐身战机,己方仅有7架F-35被击落,战损比为20∶1,战绩震惊全球。通过总结红旗军演经验,美军认为相比三代机,四代机不仅隐身,而且信息感知与融合能力也是最显著的优势之一,F-35战斗机在未来的空中作战中可以同时扮演侦察机、预警指挥机、攻击机的角色。出色的信息感知与融合能力使得F-35战斗机这样的四代机,不再仅仅是一个具备空战能力的独立作战单元,还是可充分发挥信息优势的作战综合体。
2 隐身时代的空战形态及分析
2.1 隐身时代的空战形态
21世纪初,以F-22为代表的隐身战斗机出现,标志着空战进入了隐身时代。隐身战斗机的出现打破了以预警机为核心的空战体系平衡。在以预警机为核心的空战体系中,OODA循环各环节的基本形态为预警机+战斗机+飞行员+第四代空空导弹。“O”—“观察”由预警机完成,隐身战斗机的出现将预警机的探测距离减少约50%,到200 km以内,如图12所示。

图12 预警机对隐身和非隐身目标探测距离对比Fig.12 Comparison of detection distance of stealth and non-stealth targets by early warning aircraft
针对隐身空战时代的到来,空战体系形态也产生了重要变革。隐身空战中,OODA各环节呈现出分布式的特点,平台将是体系功能的分散外化的表现,每一种功能将是组成体系的基本单元,某一个平台的失能,不会造成整个体系失能。为完成一种任务,会有很多种可能的OODA循环,在充沛算力的支持下,计算机可以实时给出所有可能的OODA循环,并推荐若干个供飞行员选择。在整个循环运行过程中,由于平台的损毁或被干扰,OODA循环可快速重新构建,大幅增强了循环过程的鲁棒性,如图13所示。

图13 两种不同的空战体系OODA对比Fig.13 Comparison of two different air combat systems OODA
隐身空战中,以平台速度和灵活性为王的日子正在逐步消失, 在战斗机作战中, 电磁域和赛博域成为主导未来空战的关键, 未来赢得优势的关键是要比对手更快地获得优质信息,并且能够以比对手更快的速度运用这些信息。
2.2 隐身空战形态的分析
2.2.1 无人机是解决隐身化时代高风险空战的重要平台
未来空战是以隐身平台为主体的空战,在反隐身探测技术没有颠覆性突破的前提下,隐身作战意味着将对抗双方拉回到几十千米甚至十几千米的距离以内。从现代化空空导弹的攻击范围和速度来看,这个距离对于飞行员而言无疑是致命的,因此无人机将是解决未来隐身化时代高风险空战的重要方法,具体途径是将无人机部署在有人机之前,让无人机进入空战的高危险区域作战,有人机在无人机后方进行指挥和控制,这是未来隐身化时代空战的基本形态。
有人机飞行员无法去远程驾驶或操控无人机,而是将任务级指令发送给无人机,无人机根据指令自主完成任务。因此,除隐身性能以外,自主性的高低是衡量评价未来有人/无人协同空战能力的重要表现。
2.2.2 多中心、自组网成为未来空战体系的主要架构形式
随着无人机被引入空战体系,有人机对无人机必须通过自组织网络实现互通互联,为保证体系的鲁棒性,空战体系将摆脱以往单一中心的不足,向“以少量有人平台为中心+大量分散化功能的无人平台”的架构形式发展。
未来的中心节点平台应具有较强的探测、侦察、指挥、电子战等综合能力,这种平台相对复杂、价值高,一般在战场后方,需要人对信息进行综合性分析,因此以有人平台为主。无人平台成本低、数量多,承担着体系OODA循环中的某一种或两种功能,当无人机只具备空战的某一种功能时,如某型无人机只承担火力投送功能,其设计复杂程度将大幅度降低,再采用模块化技术,可以使得平台研制周期和经费大幅度降低,成本也大幅度降低。
2.2.3 低成本化带来的规模效应,人工智能解决飞行员的决策困境
无人机成本的降低和现代发达的制造业,势必使组成体系的平台越来越多,未来大国之间的空战可能是数以百计的飞机在空中进行作战。大量的信息在网络中高速传输,加之隐身化时代空战时间短、节奏快的特点,在30 km发起攻击,OODA循环仅大约20~30 s,如何在大量的目标中选择和瞄准最具威胁的一个或多个目标,造成了飞行员在“D”—“决策”环节上出现困境。短时间、海量信息条件下的“决策”成为整个OODA循环的关键之一。随着人工智能的快速发展,给复杂战场环境下的快速决策提供了可能性。计算机未来或将为飞行员提供若干个OODA循环的解决方案,飞行员根据经验对选择其中的一个,即通过人工智能辅助飞行员进行决策。
3 空战形态变革对国内航空军事装备和技术发展启示
3.1 加强面向未来全隐身空战体系的顶层设计和需求牵引
未来全隐身时代“以少量有人平台为中心+大量分散化功能的无人平台”的多中心、自组网空战体系,将会有大量不同功能的无人平台出现,如信息互联、火力投送、探测侦察等,体系的复杂性成几何级数级增加。传统先有平台、后有体系,以飞机平台为中心、网络为辅助的搭建方式已无法满足未来网络中心、功能分散的复杂空战体系设计需求,需要一个规划团队从体系顶层出发,统筹安排、合理规划,形成面向未来空战的体系需求,并充分考虑将已有平台和武器纳入到未来空战体系中,最终形成对平台、武器、网络的合理化需求,以满足未来空战体系的需求。
3.2 持续完善现有空战体系的信息化建设和确保网络安全
信息化是体系发展永恒的主题和体系的基础,从最早期的一代、二代机之间的无线电语音通信,到三代机全向高速数据链的指控信息传输,再到隐身战斗机机间的低截获数据链的火控信息传输。
面向未来全隐身时代的空战体系,平台数量成倍增加,信息传输量更大,时敏性要求更高,需要有更高速的信息链路将平台与平台连接起来。随着无人机的快速发展,未来将不断有新型平台需要融入到体系中,这就要求未来信息网络具有开放式架构,能够快速将新平台纳入到体系中。虽然空战体系变化,但现役的飞机和武器还将服役相当长的一段时间,未来的信息化网络能够将现役装备也纳入到未来体系中,这就要解决跨代平台之间的高速互联互通问题。
网络的广泛使用,促使赛博域成为未来实体域对抗以外的新战场,甚至是决胜战场。虽然未来空战体系已经没有完全意义上的实体中心,但从某种意义上来说,信息网络已经成为体系“中心”,一旦信息网络被攻破,体系将彻底瓦解。因此,加强空战体系网络安全,提高网络的抗扰、抗损、抗毁和防入侵能力,成为未来空战的关键。探索和研究适合空战赛博域作战方式和方法,增强跨域联合作战优势和颠覆性能力。
3.3 推进隐身有人平台持续发展和非隐身平台的隐身化发展
未来全隐身时代是“以少量有人平台为中心”,但这并不意味着有人平台会逐步退出空战舞台,反之有人平台将成为未来空战体系局部的指挥控制中心。隐身有人平台主要承担OODA循环中的“决策”环节,大量的先进探测技术、信息综合与处理技术、人工智能辅助决策技术等都将在有人平台上广泛应用,有人平台的综合性能将进一步得到提升。
3.4 促进国内大数据和人工智能等技术向国防航空行业的转化和应用
对海量信息快速高效处理并形成行动方案,是未来空战体系的关键能力之一,需要加快推动民用大数据技术和人工智能技术向国防航空行业应用,推动人工智能技术进座舱,在多源信息融合处理和高效综合利用方面发挥积极作用,研究能够根据战场态势,形成行动方案,成为辅助飞行员进行决策的智能助手。此外,还要推动智能技术向无人机自主飞行和任务执行方向发展,使其能够更好地自主完成飞行员分配的任务。
3.5 持续推动电子战技术和装备发展,研究新型干扰机理和方法
通过对OODA循环分析不难看出,无论空战体系如何发展,对抗双方都会针对循环的每一个环节实施干扰、欺骗等迟滞OODA循环的方法。从发展来看,无论是现代和未来电子战技术和装备都是空战装备的关键。在双方大量空中平台协同作战时,局部干扰已经无法使体系失能,反而干扰源可能会被不同方位无人机协同定位,而成为被攻击的对象。面向未来的体系化空战,空战电子干扰装备应实现对特定方位、特定频点的精准干扰,避免暴露自身位置和其他信息。
另一方面,雷达作为主流探测系统具有看得远的优势,但在全隐身空战体系下,雷达作用被大幅降低,且主动辐射更容易暴露自己。因此,光电探测系统由于其良好的被动探测特写,或将成为未来全隐身空战时期重要的发展方向。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:40
北京航空航天大学学报(2021年9期)2021-11-02 08:24:24
小哥白尼(军事科学)(2021年5期)2021-08-30 06:46:12
文萃报·周二版(2019年28期)2019-10-21 09:16:12
军营文化天地(2017年6期)2017-06-28 11:30:09
现代兵器(2017年5期)2017-06-01 20:30:09
百科探秘·航空航天(2015年10期)2015-11-07 07:05:14
舰船科学技术(2013年12期)2013-08-15 00:51:50
军事历史(1999年3期)1999-08-20 07:28:12
