
模块化多电平铁路功率调节器复合控制策略研究
2022-08-09 02:43宋平岗雷文琪龙日起杨长榄
铁道学报 2022年7期
宋平岗,陈 怡,雷文琪,龙日起,杨长榄
(华东交通大学 电气与自动化工程学院,江西 南昌 330000)
随着“一带一路”国家战略进一步推进以及经济的不断上行,货运及客运的需求增加,交通运输行业不断面临着新的挑战与要求,高速电气化铁路因其运载能力强、运行速度高、准时正点及安全舒适性等优点,在世界范围内备受青睐[1]。然而电气化铁路机车作为典型的单相负载,具有非线性、负荷波动幅度大、三相分布不对称等特点,在运行过程中会产生负序和高次谐波电流,并将其注入交流电网中,从而引发电压不对称、三相不平衡等电能质量问题[2],这不仅给电力系统的安全稳定运行留下了隐患,而且会引起附近电力设备的扰动与误操作。
为有效治理单相机车负载引发的电能质量问题,国内外多采用了专项专治的策略,针对不同类型的电能质量问题采取相应的措施进行治理。治理方法大体分为两类:①对供电系统自身设备结构进行优化,其中包括引入平衡变压器、对牵引网扩容、应用贯通式供电技术(Static Frequency Converter,SFC)[3-4]等,但此类方案工程应用性不强。②外设补偿装置,如:无源滤波器(Passive Filter,PF),但只能消除特定阶次谐波且易导致谐振[5];静止无功补偿器(Static Var Compensator,SVC),但存在引入谐波电流的风险[6];全控型静止同步补偿器(Static Synchronous Compensator,STATCOM),可抑制电压波动,但难以处理负序问题[7-8];铁路功率调节器,凭其对牵引供电系统中电能质量问题的全面综合治理能力,成为当前的研究热点。其中模块化多电平铁路功率调节器不仅具有传统RPC的功能,而且其模块化程度高、开关损耗小,可以提高功率电压等级,无需降压变压器即可直接接入牵引网馈线两侧[9]。
针对模块化多电平铁路功率调节器(Modular Multilevel Converter-railway Static Power Conditioner,MMC-RPC)的控制方法,众多学者对其进行了研究。文献[10]提出了一种基于微分平坦理论的直接功率控制策略,但PI控制环节较多,响应速度慢。文献[11]针对供电臂电压波动,提出一种多目标优化算法,在一定程度上可以抑制电压波动,但其算法复杂,不利于大规模推广应用。文献[12]提出了一种基于滑模变结构的直接功率控制策略,但实际应用中难以消除滑模固有的高频抖振。文献[13]采用双闭环PI控制策略,实现了有功无功的独立控制,但不能很好地消除稳态误差,且受非线性因素影响较大。
重复控制器的设计来源于内模原理[14],该控制器在抑制高次谐波的同时可以提高系统稳态特性。文献[15]将重复控制器应用到有源电力滤波器中,对电流进行稳定快速跟踪,有效降低了网侧电流的谐波畸变率;文献[16]提出一种模糊控制与重复控制相结合的PWM整流器控制策略,在提高系统抗扰能力的同时降低了稳态误差。重复控制与RPC的治理理念不谋而合,但鲜有将重复控制应用于铁路牵引供电系统中电能质量治理的相关研究。
本文在文献[13]的基础上将重复控制器应用于电流内环前馈通道中,实现对电流信号的平滑跟踪,同时引入模糊控制对PI参数进行在线调整,提高了系统的响应速度、减小了静态误差并降低网侧电流谐波畸变率;针对机车过渡态运行状况下的负荷功率特性,在功率外环采用传统PI与变参数PI相结合的分段控制策略,减小了大波动负荷电流及高频负荷冲击所带来的系统超调量大的负面影响。通过在Matlab/Simulink中搭建仿真模型,验证了所提控制策略的优越性和可行性。
1 MMC-RPC拓扑结构与补偿原理
1.1 拓扑结构
铁路功率调节器作为一种电能质量综合补偿装置,可以达到使相间有功功率平稳流动、各馈线无功及谐波稳定补偿的治理效果。MMC-RPC牵引供电系统简化结构见图1。图1中,三相220/110 kV高压经V/v牵引变压器向供电臂输送电压等级为27.5 kV的单相电压。两个H桥型MMC(Single Phase H-bridge MMC,SPH-MMC)镜面对称,背靠背分别跨接于牵引馈线两侧。牵引变压器原边连接三相公共电网,iA、iB、iC为变压器原边电流;定义uj(j=L、R)为牵引网左右供电臂电压;ij为牵引变压器副边电流。ijm(m=a、b)为j侧供电臂流入为MMC-RPC的电流,且定义交流侧等效电流is=ija-ijb。R0、L0为线路等效电阻、电感。
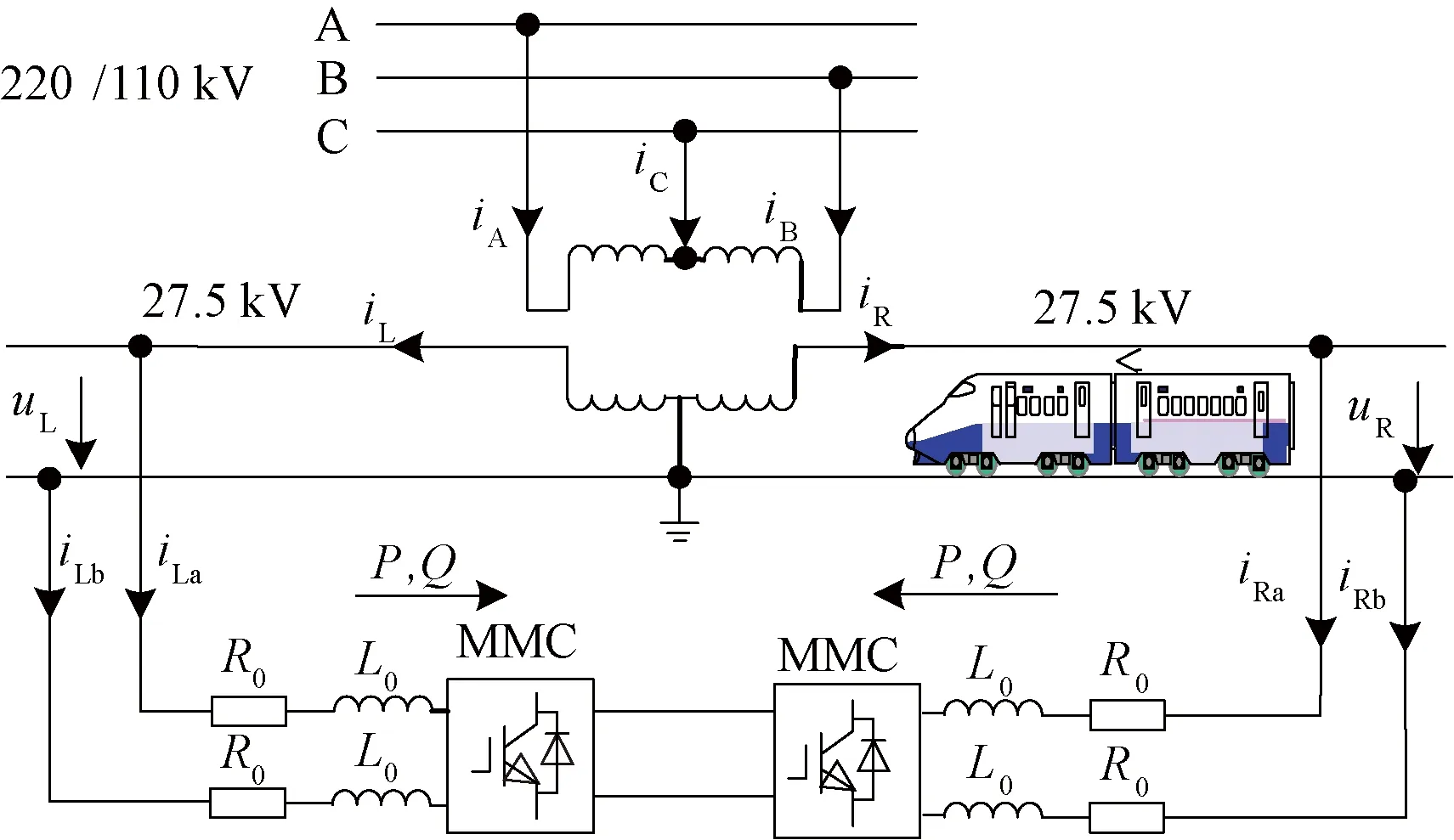
图1 MMC-RPC牵引供电系统简化结构
由于背靠背SPH-MMC结构对称、功能相同,故在此只对一侧进行分析建模,拓扑结构见图2,其上下桥臂分别由N个相同的子模块(SM)级联而成,图2中右侧虚线为半桥SM内部结构图。p、n分别为上、下桥臂相关表达定义。ump、umn表示m相上下桥臂子模块电压之和;imp、imn表示流经m相上下桥臂电流;em表示桥臂交流侧端口电压,且eab=ea-eb;us等效为左右桥臂电压uj;udc、idc分别为直流侧电压、电流;Rs、Ls分别为桥臂等效电阻、电感。

图2 单侧SPH-MMC的拓扑结构
根据KVL得出SPH-MMC交流侧数学方程为
( 1 )
MMC直流侧电压方程为
( 2 )
将式( 1 )和式( 2 )相加、相减可分别得到直流侧、交流端口电压的数学方程为
( 3 )
由式( 3 )可知,可通过对SPH-MMC子模块投切数量的管制间接控制上下桥臂子模块的电容电压,达到控制直流侧电压和交流侧输出端口电压的目的,实现MMC-RPC对牵引供电系统中电能质量的就地综合补偿。
1.2 MMC-RPC功率补偿原理
由V/v牵引变压器运行中存在的较高不平衡度及两供电臂上具有明显不对称性与波动性特征的牵引负荷可知,在无相关补偿装置的条件下,网侧原边电流难以时刻维持理想状态,负序问题显著。MMC-RPC通过平衡转换后两相系统间的有功并补偿无功来消除原边负序电流,达到综合补偿的目的。经RPC综合补偿前后的矢量图见图3。

图3 RPC功率补偿前后矢量图
图3中,UA、UB、UC为牵引变原边三相电压矢量;UL、UR为副边电压;PL、PR、QL、QR分别为左右两侧牵引馈线负载基波有功及无功功率,其视在功率为
( 4 )
( 5 )
完成有功补偿后,左右供电臂的有功功率大小相等,即P′L=P′R。若想使得原边三相电流对称,还需在式( 5 )的基础上完成无功补偿。同时,为了消除机车负载在运行时对牵引网注入的谐波影响,可用陷波器分离谐波电流,得出基于瞬时功率理论的畸变功率PLH、PRH、QLH、QRH。综上所述,L、R供电臂应补偿功率为
( 6 )
2 MMC-RPC控制策略
由于铁路单相供电为单自由系统,只有一个自由度,无法直接进行同步旋转坐标变换[17]。采用二阶广义积分[18](Second Order Generalized Integrator,SOGI)构建与实际交流量正交的虚拟分量,得到供电臂交流侧电压us以及电流is在αβ坐标系下的表达式uαβ和iαβ。单相H桥型MMC换流器交流侧经αβ坐标变换后的数学模型为
( 7 )
式( 7 )经过αβ-dq坐标变换可得
( 8 )
输入内环控制器的电流指令信号,经PI控制器解耦后产生控制输入量,实现对单相H桥型MMC的控制。电流内环解耦控制器设计如下
( 9 )
传统PI控制只能无静差地跟踪直流信号,当系统受到外界干扰时其稳态特性将会降低。在电流内环前向通道中加入重复控制器,以提高系统控制精度并有效抑制谐波信号对系统的污染。
为了得到内环电流的给定信号须引入外环控制器,在此采用定有功/无功功率控制。其设计如下
(10)
式中:P*、Q*为有功、无功功率参考值;Um为网侧基波电压幅值。
2.1 电流内环重复模糊PI控制策略
2.1.1 重复控制器设计
重复控制器的设计思想来源于内模原理。通过在控制器中嵌入一个基波周期的延时,将上一时刻的误差信号和当前时刻的误差信号进行累加,在提高系统的控制精度、减小稳态误差的同时,对电流中的主要谐波可以做到有效抑制[15]。重复控制器传递函数为
(11)

由式(11)可知,重复控制器具有多个谐振点,能够有效抑制n次谐波对系统造成的影响。对式(11)进行离散化处理后得到传递函数为
(12)
式中:N为重复控制器的内模参数,N=fs/f,其中fs为系统的采样频率。
理想状态下的重复控制器设计原理见图4,其中Gp(z)为被控对象。

图4 理想状态下重复控制器原理
当重复控制器的内模输出信号受到扰动信号的干扰时,易导致被控对象的输出信号无法跟踪系统指令信号,存在致使系统失去稳定性的风险。因此实际应用中重复控制器设计为图5的形式。图5中Q(z)为改善系统稳定性的函数,既可以为低通滤波器,也可以取小于1的常数;Gc(z)为补偿函数。

图5 实际重复控制器原理
由图5可得系统的闭环传递函数为
(13)
系统稳定的充要条件是Φ(z)的所有闭环极点位于单位圆内。设Φ(z)的特征多项式为D(z),即
D(z)=1-Q(z)z-N+z-NGc(z)Gp(z)
(14)
令D(z)=0,可得
|z|N= |Q(z)-Gc(z)Gp(z)|
(15)
令H(z)=Q(z)-Gc(z)Gp(z),由式(15)可知,系统稳定的充分必要条件为H(z)在全频段位于单位圆内。
2.1.2 模糊PI控制器设计
传统重复控制器在误差补偿时存在单位周期的延时,系统存在动态响应慢、抗电网波动能力差的弊端[19]。为了提高系统的动态性能,本文以将PI控制器和重复控制器相结合的方式来设计内环控制器。文献[20]提出一种并联型PI+重复控制方案实现对LCL逆变器的控制,但该方案的控制系统设计复杂,实际应用难度大。因此,提出一种串联型PI+重复控制的复合控制器结构,使重复控制的输出加在PI控制的给定值上,在保证谐波抑制效果的同时满足了系统的稳定性要求。由于传统PI控制器参数难以整定,当系统发生扰动时,容易失稳。在此引入模糊控制对PI控制器参数进行在线调整,使得调节范围更宽,提高了系统的鲁棒性,改善了系统的控制性能。模糊PI+重复控制器控制框图见图6。

图6 模糊PI+重复控制器控制框图
2.1.3 重复控制器参数设计
为了达到最优控制效果,需对重复控制器的相关参数进行合理设计。
为实现电流环的稳定无静差控制,应确保|Q(z)|<1。通常情况下将Q(z)设计成低通滤波器或者小于1的常数。经过仿真试验,最终确定当Q(z)=0.95时,系统可以获得良好的响应。系统采样频率fs=10 kHz,每周期采样次数N=fs/f=200。
补偿器Gc(z)用来补偿被控对象Gp(z)的幅值和相位,增强系统的稳定裕度,提高控制精度。
Gc(z)=KrzkS(z)
(16)
式中:Kr、zk分别为补偿被控系统的幅值、相位。
假设仅有重复控制器作用于被控对象,则电流环被控对象可看作一阶惯性环节。其在s域的表达式为
(17)
式中:L为电感,L=1 mH;R为等效电阻,R=0.5 Ω。
将被控制对象经过零阶保持器进行离散化处理得到
(18)
系统的采样频率为fs=10 kHz,代入式(18)可得
(19)
进而可得被控对象的闭环传递函数Φp(z)为
(20)
闭环传递函数Φp(z)Bode图见图7。由图7可知,Φp(z)在中低频段的幅频特性不为1,在中高频段幅值衰减缓慢,且存在明显相位滞后,严重影响了系统动态响应的实时性。

图7 闭环传递函数Φp(z)Bode图
由于高频段相位滞后严重且难以校正,本文采用二阶低通滤波器S(z)对高频段幅值进行加速衰减,以此消除高频谐波的干扰。参考文献[16],滤波器的转折频率取开关频率的1/5,系统阻尼比取最佳为0.707。则离散状态下的二阶低通滤波器设计为
(21)
补偿效果下KrS(z)Φp(z)的Bode图见图8。图8中幅值补偿系数Kr=1.45。

图8 补偿效果下KrS(z)Φp(z)的Bode图
对比分析校正前后的Bode图可知,补偿后中低频段增益为1,且在中高频段可以快速衰减幅值,从而减少高频谐波的干扰。但分析校正后的相频特性曲线可知,系统相位滞后比较严重,需通过相位补偿器zk进行相位补偿。图8相频特性曲线中的虚线表示z-3的相频特性曲线,可以看出中低频段其相位能与KrS(z)Φp(z)保持一致,在此引入超前环节z3对相位进行补偿,使电流能够准确跟踪给定信号。
由式(15)可得系统的特征根表达式为
H(z)=0.95-1.45z3S(z)Φp(z)
(22)
系统稳定的充要条件为H(z)在全频段内的所有特征根位于单位圆内。为检验系统的稳定性,绘制1.45z3S(z)Φp(z)和单位圆的Nyquist曲线见图9。由图9可知,1.45z3S(z)Φp(z)的Nyquist曲线包含在以(0.95,0)为圆心的单位圆内,因此设计系统满足稳定性条件。

图9 1.45z3S(z)Φp(z)和单位圆的Nyquist图
2.1.4 模糊控制器参数设计
模糊PI控制,即根据模糊逻辑和一定的模糊规则对Kp和Ki进行在线优化,以克服传统PI控制器不能进行参数实时调整的弊端。模糊PI控制器主要由参考电流与输出电流的误差E以及误差变化率Ec的模糊化、确定模糊规则、解模糊等部分组成,其输出量为PI控制器参数Kp和Ki。模糊PI控制框图见图10。

图10 模糊PI控制框图
令Ed、Ecd和Eq、Ecq为电流环d、q轴的误差和误差的变化量;kp、ki为Kp、Ki模糊变量。相关参数见表1。其隶属度函数包含7个模糊子集(NB,NM,NS,ZE,PS,PM,PB),隶属度函数采用三角型。

表1 模糊控制器参数
模糊规则表见表2。采用重心法进行解模糊获得d/q的PI控制器的参数。

表2 模糊控制规则表
2.2 功率外环复合PI控制策略
功率外环的控制对内环电流的跟踪特性有一定的影响。传统PI控制通过选取比例积分增益来使系统实现所需的动静态性能:随着Kp的增加,系统响应速度加快,但是容易出现震荡,不利于系统稳定运行;Ki用于减小系统的静态误差,Ki越小,系统的静态精度越高,但超调量也会随之增大,反之,Ki越大将导致系统的静态精度不够,尤其当系统处于大偏差阶段时,Ki会使系统出现大的超调现象[21]。常规PI参数不能根据被控对象的实时情况进行动态调整,难以适应铁路机车移动单相可变负载的运行工况。为克服这一缺点,本文设计一种由传统PI与变参数PI相结合的分段PI控制策略来实现对功率外环的稳定控制。复合PI控制框图见图11(以定有功功率控制为例)。通过给误差开关S设置阈值Es(取稳态误差的1.5倍)对有功功率进行分段控制。当误差|e|>Es时,判断有功功率处于过渡过程,误差开关S切换至变参数PI控制模式;当|e|≤Es时,判断有功功率处于稳态过程,误差开关函数切换至传统PI控制模式。
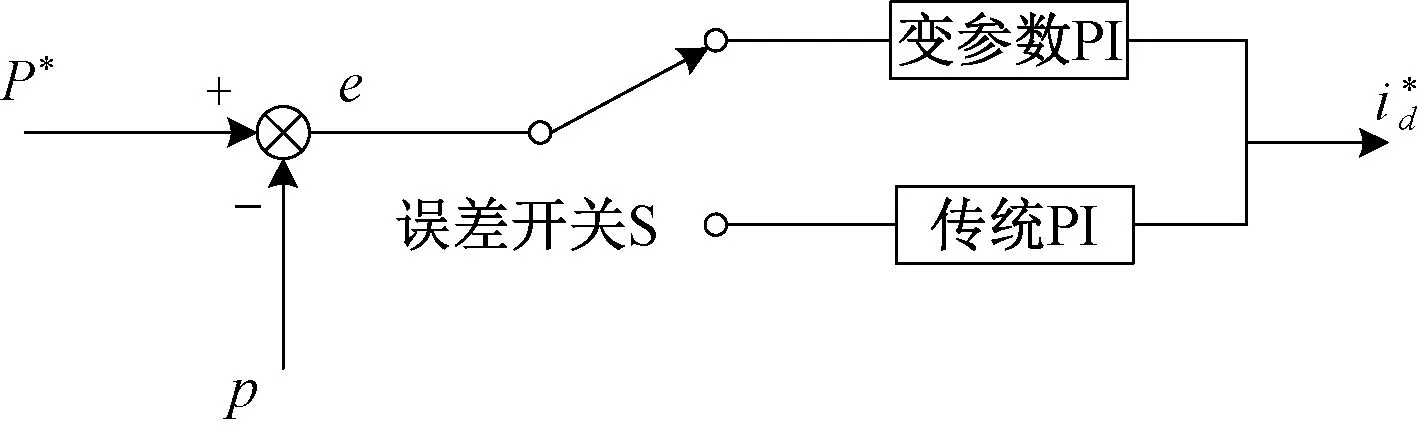
图11 复合PI控制框图
在有功功率响应处于过渡阶段时,有功功率参考值与实际输出值误差较大,系统超调量大,响应速度慢,此阶段采用变参数PI控制。取Kp、Ki为误差e的函数,当误差变大时,Kp增加,系统响应速度提高;当误差逐步变小时,Kp减小的同时Ki增加,使系统能够快速无超调地达到有功功率给定值。变参数PI控制设计关于误差e的函数表达式[22]为
(23)
式中:kp0、ki0为比例积分增益的初始值kp0=ki0=1×10-5;k1、k2为修正系数。一般取0 综上可得MMC-RPC的整体控制框图见图12。 图12 基于复合控制策略的MMC-RPC控制框图 为验证所提控制策略的优越性和有效性,在Matlab/Simulink仿真软件中分别搭建基于复合控制策略以及传统双闭环PI控制下的MMC-RPC仿真模型并进行对比分析。模型参数见表3。 表3 仿真模型主要参数 为验证本文所提控制策略下的MMC-RPC的治理补偿效果,仿真模拟V/v牵引变压器处于最大不平衡工况下的功率补偿,即仅存在一侧供电臂有电力机车负载运行(采用右侧供电臂)。 右侧供电桥臂机车负载SR_load1=(15+j3)MV·A,并向牵引网注入幅值为80 A的3、5、7、9次谐波。在仿真运行到0.2 s时投入MMC-RPC进行治理,并与传统PI双闭环控制下的治理效果进行对比。 在实际牵引供电系统运行状态中,鲜有单一供电臂有负载的情况,牵引负荷一般分散于牵引变压器的整个供电区间且两供电臂负载间无较大偏差。仿真模拟的设计是为了验证所提控制策略下的MMC-RPC在应对V/v牵引变压器不平衡状态极为严重情况下的补偿治理能力。 3.1.1 原边电流、左右供电臂电流波形分析 传统双闭环控制的波形见图13;复合控制策略下的波形见图14。 图13 MMC-RPC传统双闭环PI控制补偿电流分析 图13(a)、图13(b)与图14(a)、图14(b)分别为传统双闭环PI控制与复合控制策略下补偿前后左右供电臂电流iL、iR以及V/v牵引变压器原边电流iA、iB、iC的波形图。在0.2 s时,MMC-RPC投入运行,两种控制策略都能实现负序治理的效果,使左右供电臂和三相电流达到平衡。但是传统双闭环PI控制在MMC-RPC投入瞬间,三相电流存在小幅度波动,而采用复合控制策略时,能相对平稳快速地进入负序治理状态,输出电流波形呈现出较好的正弦性。 图13(d)与图14(c)分别为传统双闭环PI控制与复合控制策略下补偿后V/v牵引变压器原边电流iB的频谱分析图。MMC-RPC未投入运行、传统PI控制下以及本文所提的复合PI控制下MMC-RPC投入运行后V/v牵引变压器原边电流iB的各次谐波含量以及THD值的比较结果见表4。由表4可知,传统双闭环控制输出电流畸变率较高为4.04%,复合控制策略下畸变率为2.62%,降低了1.42%,输出波形质量得到了有效改善,同时可以看出复合控制策略对谐波的治理能力优于传统PI控制。 图14 MMC-RPC复合控制策略下补偿电流分析 表4 补偿前后电流iB各次谐波电流含量及THD值 % 3.1.2 左侧供电臂功率波形分析 为验证变参数PI在提高系统控制精度上的优越性,在0.2 s时,将MMC-RPC投入运行,此时相当于给系统加入一个“扰动”,来分析变参数PI控制的波形,与传统PI控制的波形对比分析。 补偿前后传统PI双闭环控制和变参数PI控制策略下左侧供电臂传输功率波形见图15。由图15可知,两种控制策略均能稳定功率的传输,但传统双闭环PI控制下功率波动范围较大,存在稳态误差。而本文所提控制策略下,在RPC投入运行后,功率可以迅速无超调地达到参考值,且波动小,跟踪控制效果好。两种调节器的控制性能的对比见表5。 图15 补偿前后MMC-RPC供电臂功率波形 表5 两种调节器控制性能的对比 3.1.3 直流侧电压波形分析 由于MMC-RPC由两个单相H桥结构的MMC背靠背连接构成,要求控制系统要能够很好地控制直流电压的稳定。本文所提控制策略和传统PI双闭环控制下的直流侧电压波形见图16。 图16 两控制策略下直流侧电压波形对比 由图16可知,两种控制方法都能对直流侧电压进行有效控制,分析其局部放大图可知,相对于传统PI,复合控制下的电压波动幅度小,控制效果更佳。 为进一步验证基于复合控制策略下的MMC-RPC在牵引供电系统中的电能补偿治理效果,对以下两种工况进行仿真分析。 工况1:为验证所提控制策略下MMC-RPC应对负载投切时的治理效果,在3.1节仿真的基础上,分别在0.30、0.37 s时刻对增加的机车负载SR_load2=(15+j3)MV·A进行投入和切除。 工况1下负载投入和切除时V/v牵引变压器原边电流以及左右供电臂电流仿真波形见图17。0.3 s时左供电臂负载SR_load1=(15+j3)MV·A突变为(30+j6)MV·A,V/v牵引变压器原边电流从33 A增加为66 A;0.37 s时电流随着负载的切除恢复至原值。无论负载在投入还是切除时,调整V/v牵引变压器补偿电流时间均小于0.5个周期,使得系统快速达到三相平衡。说明本文所提控制策略下MMC-RPC可以适应负载突变时的功率补偿。 图17 负载突变时V/v牵引变压器原边电流、左右供电臂电流 工况2:为验证所提控制策略下MMC-RPC应对潮流反转时的控制效果,在RPC投入运行的情况下,0.3 s时机车负载SR_load1=(15+j3)MV·A从右侧供电臂过分相转移到左侧供电臂。 工况2下潮流翻转即负载换相时V/v牵引变压器原边电流以及左右供电臂电流仿真波形见图18。0.3 s时机车负载进入分段换相区(供电死区),0.35 s时右侧负载SR_load1=(15+j3)MV·A转移到左侧供电臂,潮流发生反转,所提控制策略下的MMC-RPC能够在0.02 s内应对负载过分相,补偿V/v牵引变压器使得电流快速恢复平衡。 图18 负载换相时V/v牵引变压器原边电流、左右供电臂电流 文章针对V/v牵引供电系统中电力机车运行时产生的负序和谐波电流问题,提出一种复合控制策略的MMC-RPC控制策略。通过仿真分析得出以下结论: (1)设计在相同参数及运行工况下,对比复合控制策略与传统PI控制对电能质量问题的治理效果。相对于传统PI控制,复合控制下的V/v牵引供电系统可以实现对电流的实时平滑准确跟踪,系统响应速度更快,THD值更低,功率波动范围更小,其不平衡度为0,可以实现单位功率因数运行;对控制参数进行动态调整,动态性能好,增强了系统的抗干扰能力。 (2)在极端工况下,如机车负载发生突变或潮流发生反转时,本文所提控制策略下的MMC-RPC能够迅速响应,使系统快速达到平衡状态,治理效果显著,有利于RPC适应于铁路负载多变、非线性、复杂的运行环境。
3 仿真分析

3.1 电流、功率、直流侧电压波形分析





3.2 两种工况下复合控制策略仿真分析


4 结论
猜你喜欢
能源工程(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
云南电力技术(2021年6期)2022-01-18
上海理工大学学报(2021年3期)2021-07-20
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
消费导刊(2018年10期)2018-08-20
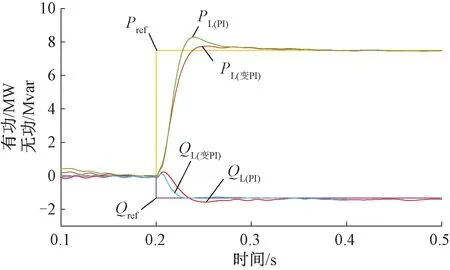
电子制作(2018年9期)2018-08-04
山东工业技术(2016年15期)2016-12-01
人生十六七(2016年14期)2016-12-01
