RGB-双边滤波增强的二维Otsu阈值分割算法*
2022-08-09 06:16:10肖夏伟陈苏怡朱伟兴
计算机时代 2022年8期
肖夏伟,陈苏怡,朱伟兴
(江苏大学电气信息工程学院,江苏 镇江 212013)
0 引言
机器视觉技术是一种无接触、无污染和高效的监控方式,将其应用于猪养殖业,对采集的猪图像利用分割技术分割出猪个体,进而对其后续行为和身份的识别有重要意义。
基于机器视觉的猪个体前景图分割的主要研究成果有:ZHANG 等利用Sobel 检测滤波器在分割猪个体过程中预测目标边缘提升分割的精度。HU 等将低层边缘位置特征与高层特征融合,提高对目标边缘轮廓的识别能力,提高分割精度。GAO 等提出基于双金字塔网络的RGB-D 群猪图像分割方法,利用多个维度输入增强分割效果。LI 等利用对Otsu 分割方法设置多个阈值对采食区域的生猪进行分割。上述分割方法对只有单个猪的情况分割效果比较明显,对于严重粘连的猪个体分割效果有待提高。
针对多只猪粘连而难以分割的问题,提出了基于RGB-双边滤波的增强二维Otsu 阈值分割算法。首先,利用改进的YOLOV4 网络对采集的群养猪图像进行猪个体的目标检测。之后,对目标检测后的图像利用RGB-双边滤波算法锐化猪个体的轮廓边缘,并将锐化后的边缘添加至原图中。最后,利用增强二维Otsu阈值分割算法对添加后的图像进行分割。
1 信息采集的方法
群养猪实验视频集是通过在猪舍中心的正上方3米的位置架设摄像设备所采集的俯视视频,出自镇江希玛牧业有限公司的养猪场,该场猪舍的长和宽都是2米,每个猪舍中均为7头猪。获取的视频为AVI格式的RGB彩色视频,分辨率为1760*1840像素,帧率为20帧/秒。
对群养猪中猪个体进行分割,首先要对猪个体进行目标检测,改进YOLOv4 网络适用于本文猪个体的目标检测要求。YOLOV4 主体框架主要由特征提取主网络CSPDarknet-53、最大池化降维网络SPP_Block、特征融合网络PANet 和预测输出网络YOLO Head 组成。为适应猪个体目标检测作一下改进:利用Swish激活函数替代Leaky ReLU,增强的正则化效果。利用3×1 和1×3 的卷积核替代原组CSPRes_block 中的3×3 卷积核,减少参数数量,并去除部分模块,降低复杂度。在SPP_Block 中引入两种池化融合的方式替代原单一的最大池化方式,增强特征的细节性。改进模块如图1所示。
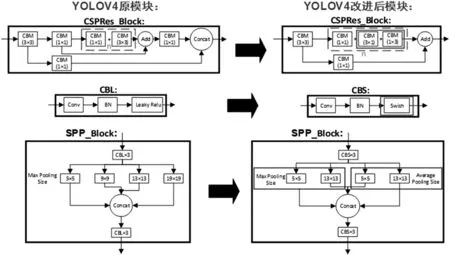
图1 YOLOV4改进模块
2 分割算法
2.1 RGB-双边滤波算法
如图2所示,猪之间会发生粘连现象,由于粘连处边缘在分割时起不到明显的作用,导致此时分割效果不佳。原双边滤波算子是对单灰度通道进行操作,引入的RGB-双边滤波算子同时对三个通道上的图像进行操作再融合,对边缘的锐化更有效,使锐化后的边缘信息在分割时具有引导作用。
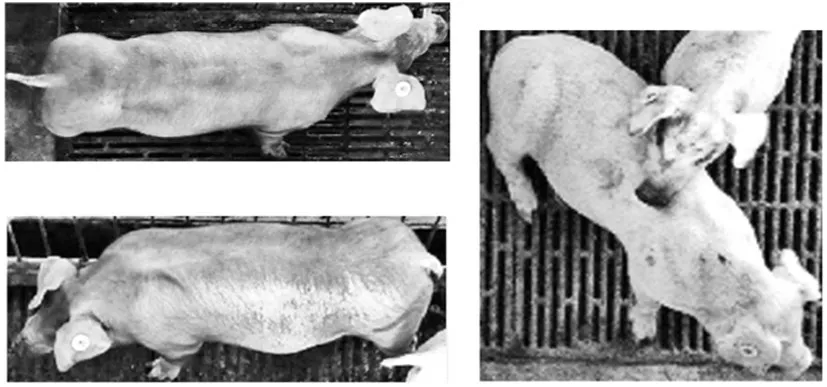
图2 粘连猪示意图
假设在像素点()x,y处的R、G、B 分量和融合量分别为I(x,y)、I(x,y)、I(x,y)和(x,y),记 为I 、I 、I 和I。像素点(x,y)记为w,为第几个像素点,其值由1 至M*N,M 和N 为图像的像素长和宽。利用RGB-双边滤波算法计算当前像素点与其中心像素点的空间邻近系数,并计算对应RGB 通道的当前像素点值与其中心像素点值的值邻近系数,具体计算如下:

计算对应RGB 通道的融合邻近系数以及输出的R、G和B三通道对应的值:

其中W 、W 和W 分别表示RGB 三通道下的融合邻近系数,表示以中心像素点(x,y)为中心的邻域内像素点的集合,O 、O 和O 分别表示R、G 和B三通道的对应输出值。
2.2 增强的二维Otsu阈值分割算法
假设一幅待分割的猪图像的像素为M*N,像素点坐标为(,)。以像素点(,)为中心,距离为的邻域内,计算该像素点的平均灰度值。

其中(,)表示像素点(,)的邻域平均灰度值,(,)表示像素点(,)的灰度值,x与y分别表示像素点(,)在邻域内两个方向的移动距离。
四次宪法修改始终与改革开放同步,及时确认了党领导人民进行改革开放和社会主义现代化建设取得的伟大成就,充分体现了党在领导人民进行宪法修订中取得的成功经验,进一步规范了党与宪法的关系。以维护社会秩序稳定为基础、以保障人权为目的,以民主化为路径,不断适应发展变化的社会关系和改革开放的新要求,展示出中国特色社会主义道路、理论、制度、文化的发展成果。
计算像素点(,)处灰度值和邻域平均灰度值组成的二维矢量(,)在整图中出现次数的频率值,设立分割初始阈值对(,),按阈值求对应的猪目标前景和背景中所有二维矢量出现次数的频率值之和。
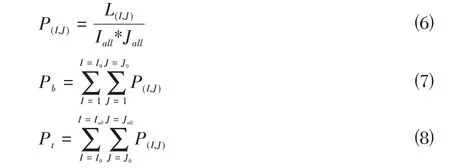
其中表示二维矢量(,)在整图中出现次数的频率值,表示二维矢量(,)在整图中的出现次数,I和J分别表示灰度值和邻域平均灰度值的最大值,P和P分别表示在背景和前景中所有二维矢量在整图中出现次数的频率值之和。
分别计算猪个体前景和背景中所有二维矢量的均值矢量和计算整张图的二维融合均值矢量。
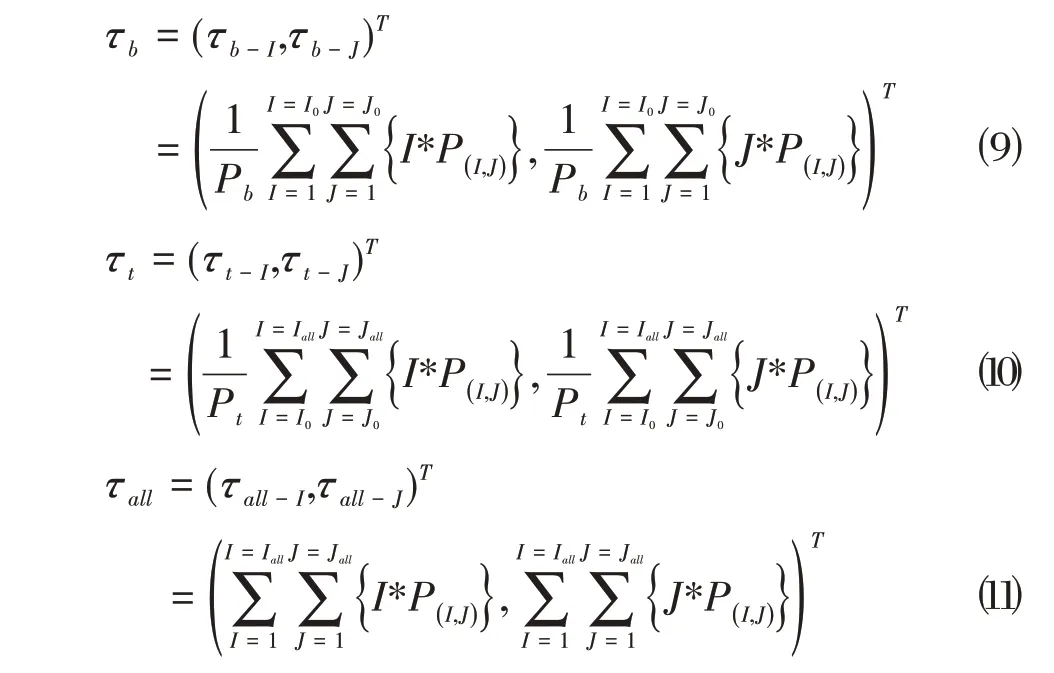
其中τ、τ和τ分别表示背景均值矢量、猪目标前景均值矢量和二维融合均值矢量。
利用三种均值矢量构造分割度量函数:
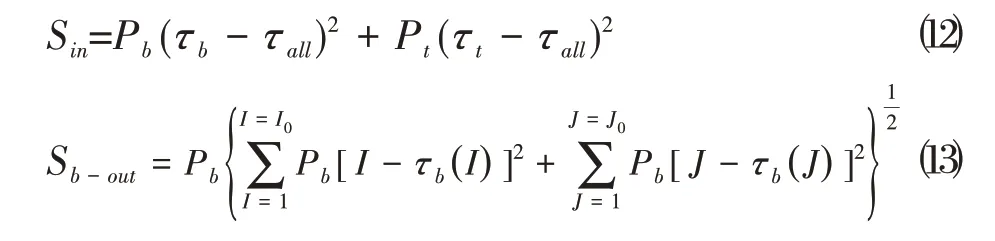
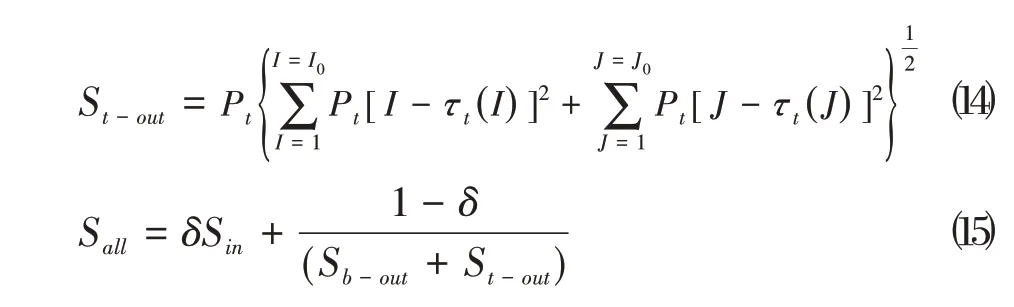
其中S表示前景和背景之间的类间度量函数,S 和S 分别表示背和前景的类内度量函数,τ()和τ()分别表示背景和前景均值矢量的分量,τ()和τ()分别表示背和前景均值矢量的分量,S表示分割度量函数,表示融合因子,其取值范围为0至1。最后给出需优化的函数表达式:

其中C表示的取值范围为1至I和取值范围为1至J的集合。
3 实验结果分析
3.1 实验平台
采用的硬件平台内存为64GB、CPU 类型为英特尔E5 2620V4×2,主频为2.1Ghz,操作系统为Win10;编程软件为Pycharm;编程语言为Python;图像处理软件为matlab 2019a;计算机视觉库为OpenCV视觉库。
3.2 锐化边缘实验分析
如图3所示,在单个猪、多只猪不粘连和多只猪粘连的三种情况下,对比原图与RGB-双边滤波后的图像边缘。原图边缘在单个猪和多只猪不粘连的情况下,猪个体边缘有部分断断续续,边缘不够清晰。原图边缘在多只猪粘连的情况下,粘连处猪头处分割效果较差。锐化后的边缘图在以上三种情况下,边缘清晰且连续,表明锐化边缘提高了多只猪粘连情况下的分割精度。
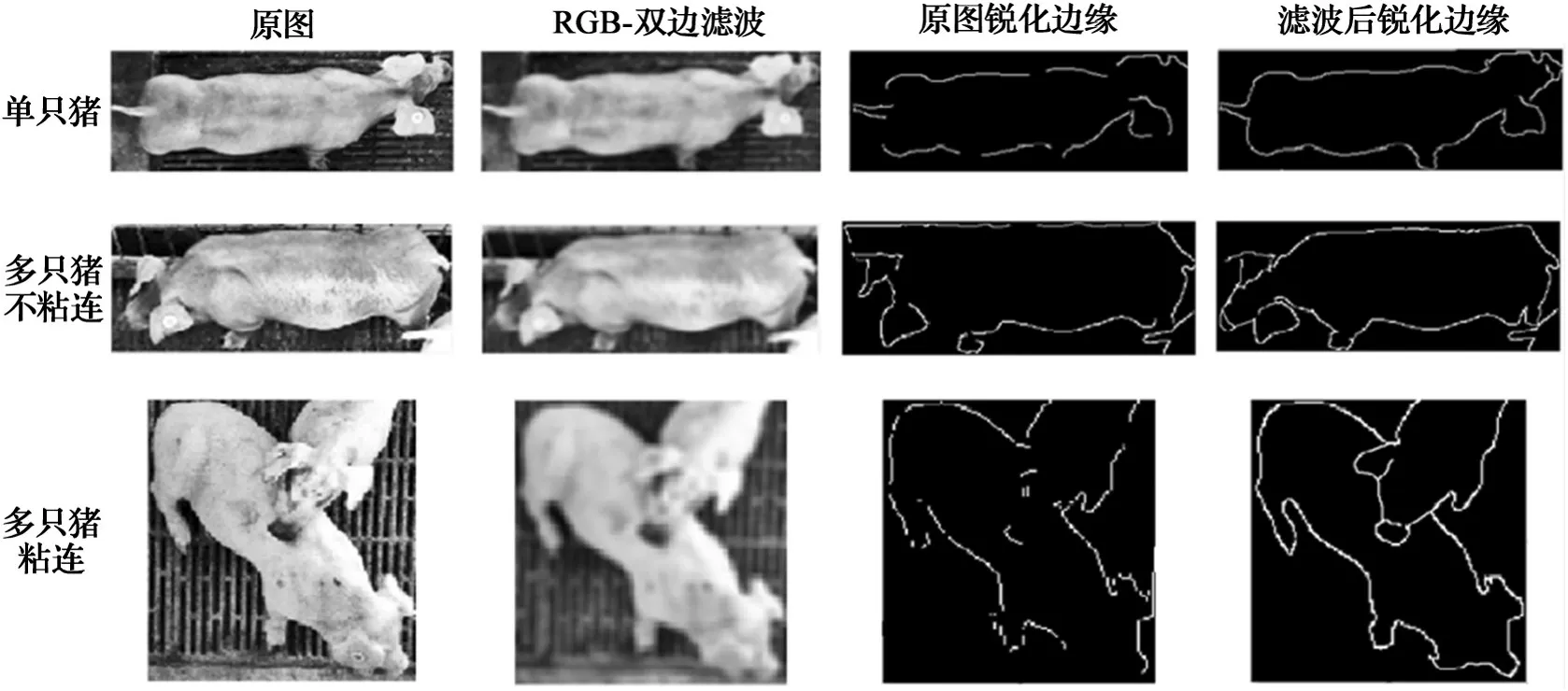
图3 锐化边缘对比图
3.3 分割实验分析
在多只猪粘连的200张图片数据集下进行有锐化边缘和没有锐化边缘的对比实验。利用分割准确率作为评价指标,其指在预测轮廓内像素点与标注轮廓像素点相交部分占标注总像素点的比例。实验结果如表1 和表2 所示,本文方法在没有锐化边缘的情况下实验结果与LI方法几乎一致,但是在有锐化边缘的情况下,本文比LI等方法准确率至少高3.29%,表明本文方法对于多只猪粘连的情况分割效果优于其他方法。
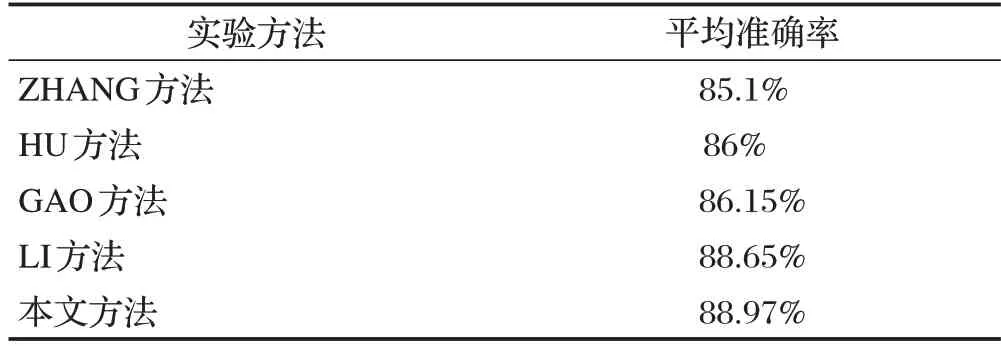
表1 没锐化边缘的情况
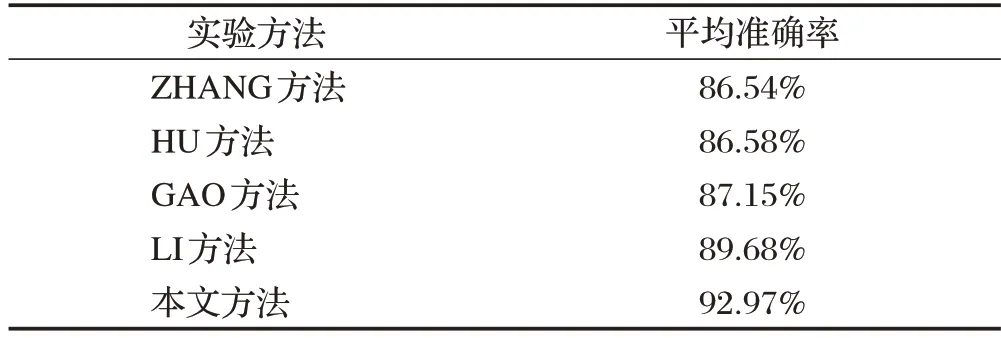
表2 有锐化边缘的情况
在单个猪、多只猪不粘连和多只猪粘连三种数据集下利用本方法进行实验,实验结果如表3所示,实验结果表明本方法对多只猪粘连的情况分割平均准确率也能保持在较高水平,并且其最大与最小准确率的跨度不大,表明该方法的稳定性。

表3 三种数据集下的分割准确率
4 结束语
提出RGB-双边滤波增强的二维Otsu阈值分割算法解决猪个体分割时的粘连问题。首先,利用改进的YOLOV4 网络对采集的群养猪图像进行猪个体的目标检测。之后,对目标检测后的图像利用RGB-双边滤波算法锐化猪个体的轮廓边缘,并将锐化后的边缘添加至原图中。最后,利用增强二维Otsu 阈值分割算法对添加后的图进行分割。实验选取有锐化边缘和没有锐化边缘的图片进行对比,结果表明添加锐化边缘后对粘连猪的分割更有效。单个猪、多只猪不粘连和多只猪粘连的三种数据集的对比实验表明本方法在多只猪粘连的情况下分割效果较好且稳定性较高。后期研究可针对边缘作进一步的增强提升分割效果。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
电脑知识与技术(2018年35期)2018-02-27 13:29:44
中国资源综合利用(2017年4期)2018-01-22 02:46:40
自动化学报(2017年11期)2017-04-04 02:52:44
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:57
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
焊接(2015年5期)2015-07-18 11:03:41
电视技术(2014年11期)2014-12-02 02:43:28
天津冶金(2014年4期)2014-02-28 16:52:46