一种双相感应电动机控制实验装置的设计
2022-08-04 09:27韩林睿邓永红
实验室研究与探索 2022年3期
韩林睿, 邓永红
(华北科技学院 信息与控制技术研究所,河北 廊坊 065201)
0 引 言
自交流感应电动机流行以来,三相与单相感应电动机调速控制的研究是大家关注的焦点,而目前人们开始将目光转向双相感应电动机,尤其是在航天起动系统与油田测井勘探等领域已经有了较为广泛的应用。然而,目前双相电动机的学术课程与实验在高校较缺乏,为能够使大学生进行双相电动机控制的实验,了解双相电动机的控制,设计搭建了双相电动机控制实验装置[1-6]。
双相感应电动机的基本结构包括转子与定子两大部分,定子无论是采用分布绕组还是集中绕组,均分为双相,且双相绕组的轴线在空间上相距90°的电气角[7]。因此,为输出稳定的双相90°电压,逆变电路可以采用空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM) 技术。相比于采用正弦波脉宽调制(Sinusoidal Pulse Width Modulation,SPWM)技术方式, SVPWM 方式谐波含量低,开关损耗小,已广泛应用于各类电动机驱动控制中[8-13]。SiC 功率器件与 Si 器件相比在功耗、开关频率和工作结温上的优势能有效提高电动机驱动器的效率和功率密度,更能适应飞机和其他行业电动机对驱动器的要求[14-16]。本文基于SPWM技术,采用SiC 功率器件设计了一种双相感应电动机控制实验装置,通过实验测试验证了装置对双向电动机稳定的变频驱动能力。
1 实验装置设计方案
双相感应电动机控制实验装置设计方案框图如图1所示,主要由3个模块构成,分别是整流逆变模块、滤波模块双向电动机模块。
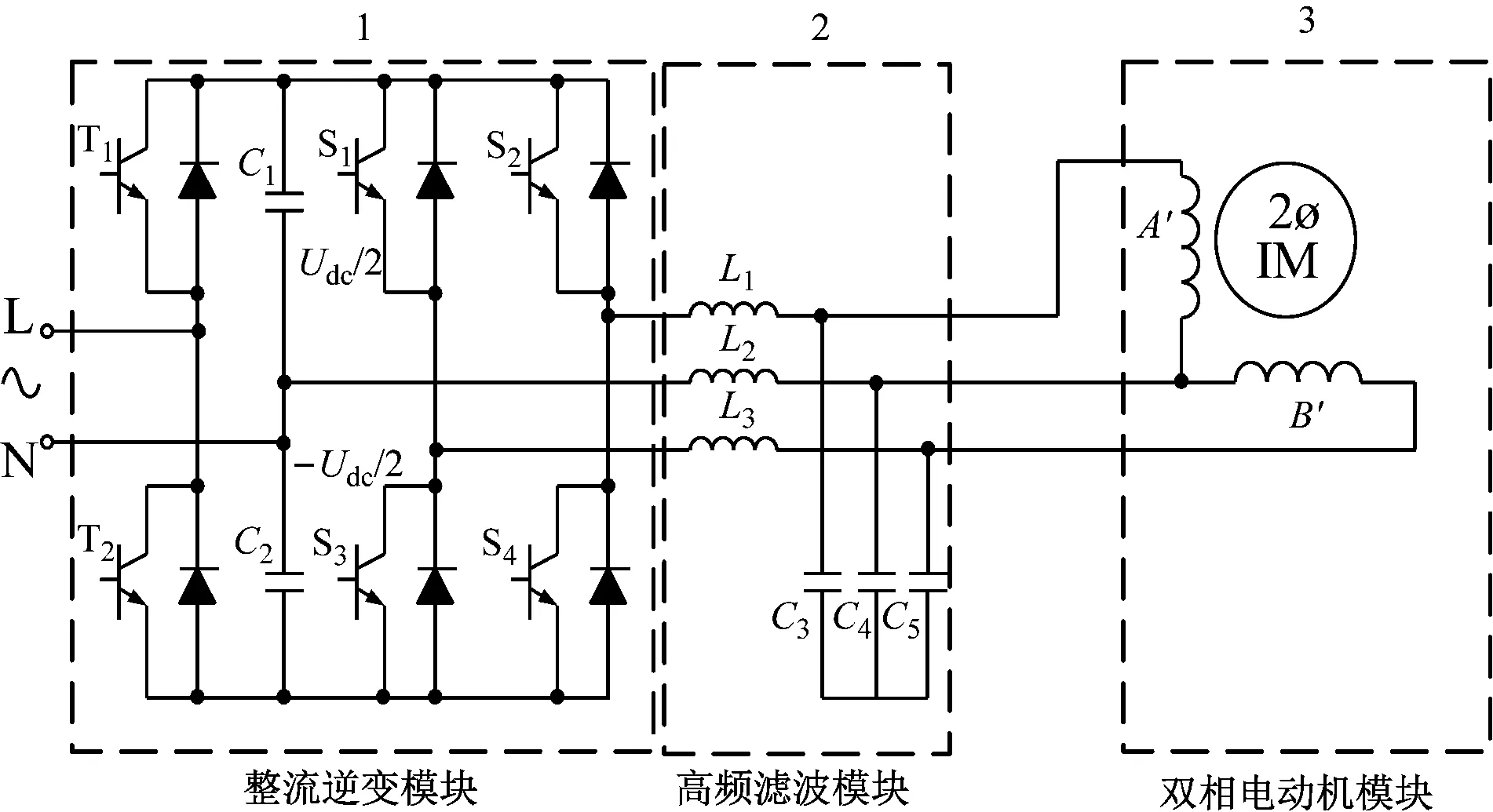
图1 双相感应电动机控制实验装置设计框图
图1中的整流逆变模块使用了6个开关(或1个IGBT智能功率模块)。其中T1与T22个开关和2个二极管用于功率因素校正的整流器,其他4个开关(S1、S2、S3、S4)及其相应的二极管用于两相变频。此驱动方式可以提高输入功率因数并减少输出电压的谐波[17]。
同时实验使用将分相电容去掉的单相双值电容感应电动机,将其改造为有2个独立绕组的双相感应电动机,如图2所示。图2中虚线将U1与Z1接线端子处断开连接U1与Z1,即将其改造为两个独立绕组的双相感应电动机。
2 SVPWM控制算法
2.1 两相逆变器的空间矢量
图3显示了当4个开关被调整时在两相逆变器中形成的4种开关状态,分别标记为4项空间矢量:V1、V2、V3、V4。基于4个单独开关的4个可能组合,标记为“0”表示连接到直流负级输出端,开关的导通方向如图示中向上。“1”代表一个连接到直流正极输出端,开关的导通方向如图示中向下。

图2 单相双值电容的电动机控制实验装置方案框图
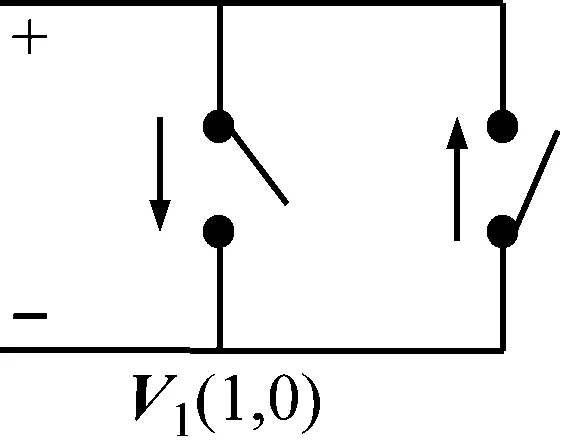
图3 逆变器的开关状态图

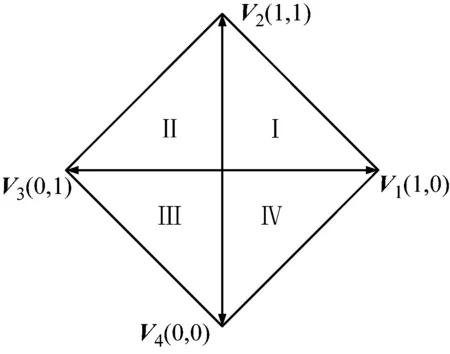
图4 逆变器两相开关的空间矢量图
2.2 两相逆变器的SVPWM中开关时间确定
如图5所示,设定V′是处于象限Ⅰ的参考向量,它是由4个空间矢量V1、V2、V3、V4决定的。将V′分解至V1和V2空间矢量上,得到V′在V1和V2上的持续时间t1和t2。空间矢量的采样间隔为Ts,则引入ΔV作为V′满足采样间隔Ts的补充向量。
但由于没有零矢量,采样间隔的剩余时间应在主象限(象限I)和对角线象限(象限III)度过。因此定义向量(V′+ΔV/2)为主象限I的主向量;则向量(-ΔV/2)为相应的约束向量。
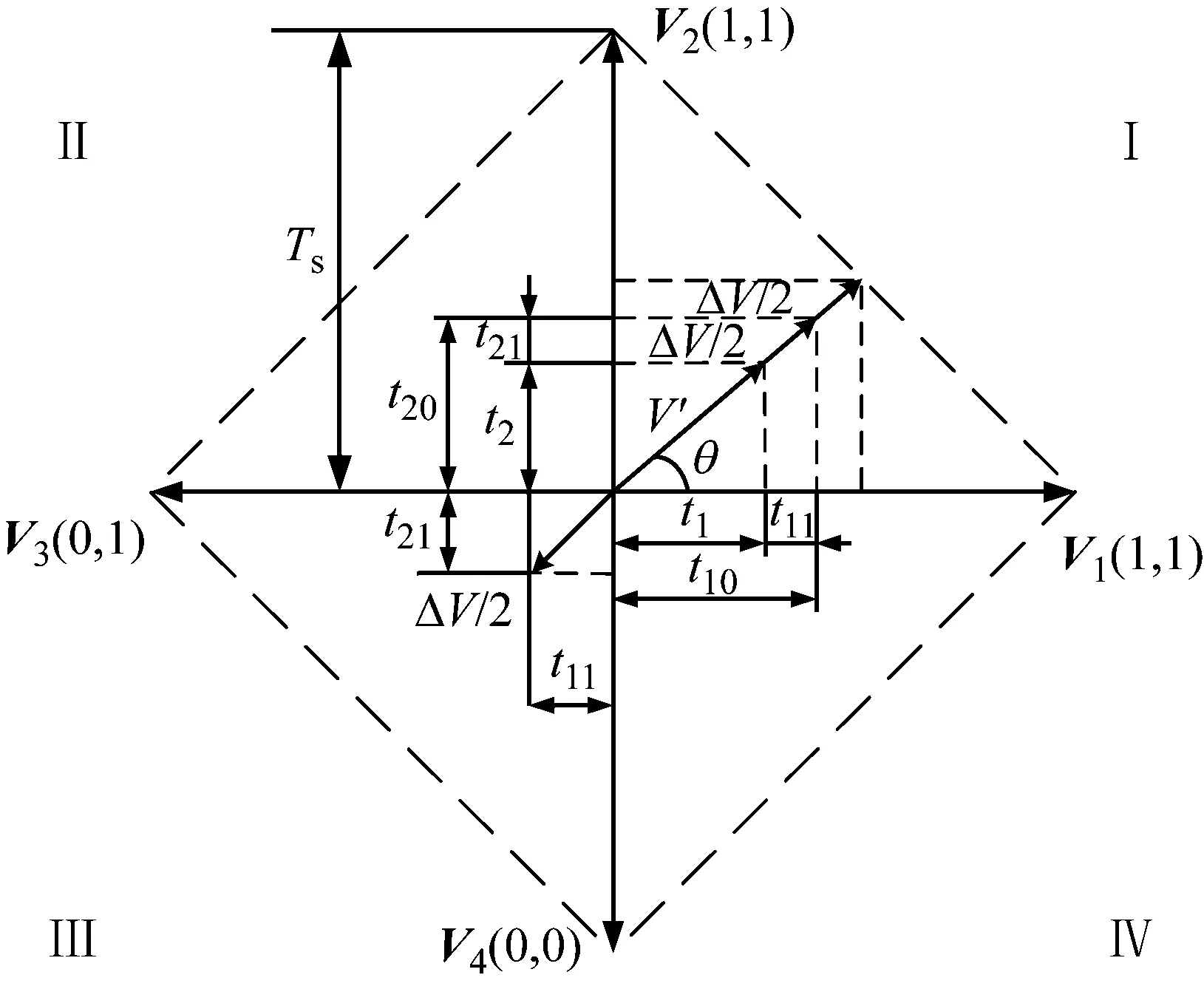
图5 SVPWM中开关时间的确定
将向量(V′+ΔV/2)分解至V1和V2空间矢量上,其持续时间为t10与t20;将向量(-ΔV/2)分解至V3和V4上,其持续时间t21与t11,根据以上参数,可以得到采样间隔如下:
Ts=t10+t20+t11+t21
(1)
同时可以根据下式:
(2)
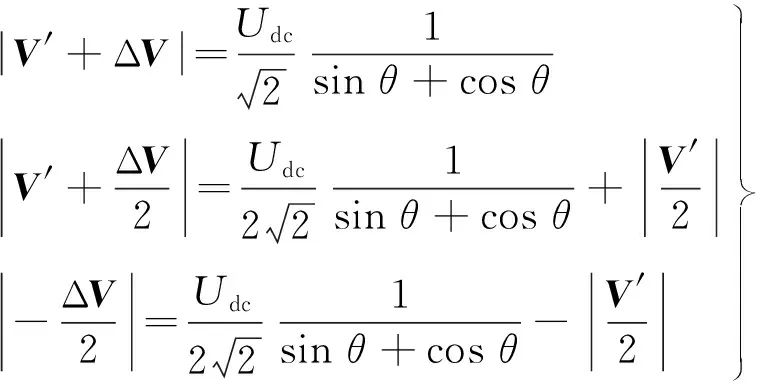
(3)
得出t10、t20、t21与t11的算法方程:
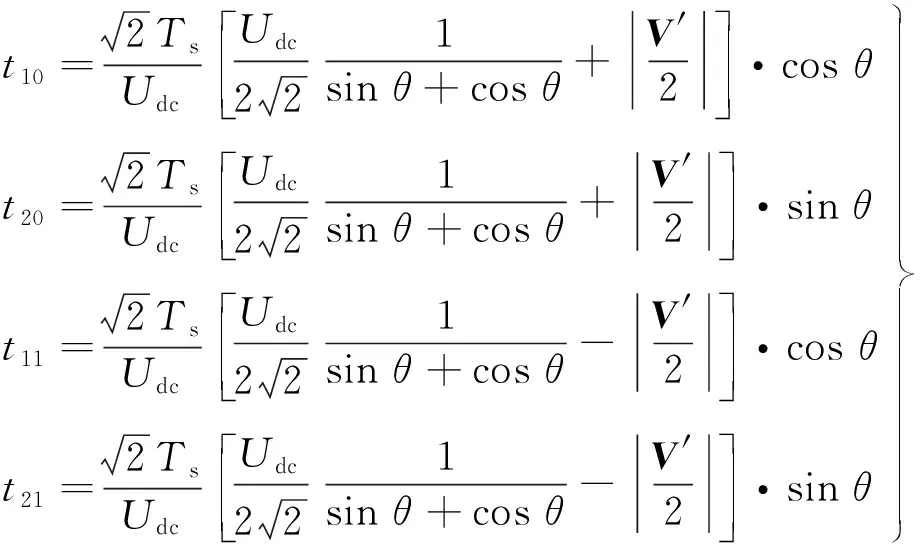
(4)
式中:|>V′+ΔV|为空间矢量的最大电压值,V;|>V′+ΔV/2|为主向量的相应电压值,V;|>-ΔV/2|为约束向量的相应电压值,V;θ为图4中参考向量与空间矢量V1的夹角;Udc为单相交流供电经过T1与T22个开关和2个二极管整流后,得到的直流电压,V;Ts为采样时间,s。
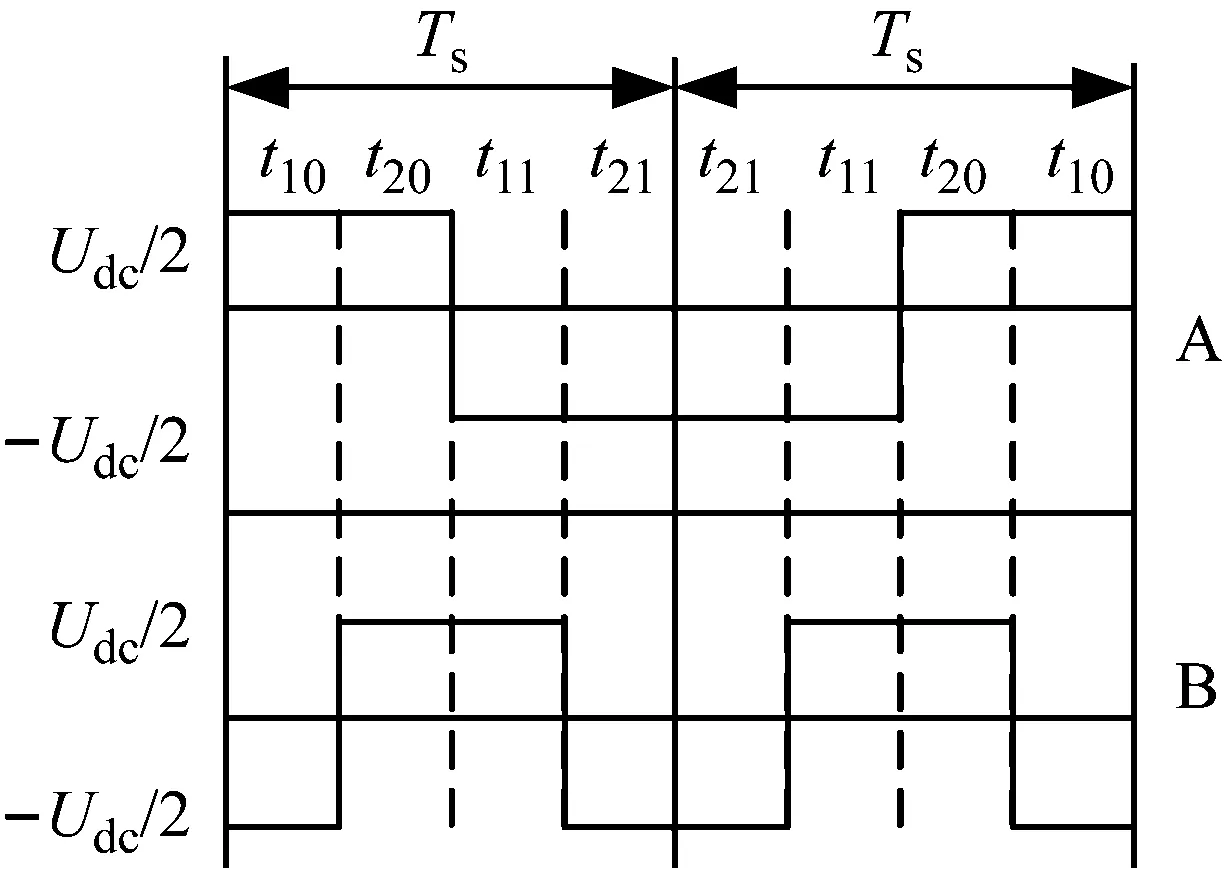
2.3 SVPWM中开关切换顺序的确定
当参考矢量V1停留在任何扇区时,为了使两相逆变器中的SVPWM电压波形达到最佳,需要修改开关顺序。正确的开关顺序可以使转矩纹波最小化并降低平均开关频率。两相SVPWM中的开关顺序的确定为两相对称调制。为了实现参考向量V′、4个空间向量和4个时间长度,必须在采样时间内由4个开关来调整,相关调整式为
TsV′=t10V1+t20V2+t11V3+t21V4
(5)
当A相的逆变脚打开1次开关,B相的逆变脚的开关在此期间进行2次切换。为了保证输出电压在扇区之间的边界处变得连续,开关顺序如图6所示。
(a) 象限Ⅰ>
设A相逆变脚打开1次开关的持续时间为TA;B相逆变脚在此期间的2次开关切换持续时间分别为TB1和TB2。每象限的TA、TB1和TB2是不同的,根据图6,整理以下两相对称调制的开关状态表(见表1),表中D为当信号发生变化时边缘触发的方向。

表1 SVPWM开关状态表
3 实验结果与分析
如图7所示为一双相感应电动机控制实验装置现场测试图片。实验目的:验证双相感应电动机控制实验装置在空载的工况下,正常输出两相达成90°输出相位差。

图7 双相感应电动机控制实验装置现场测试
实验通过提供50、100、200 V的电源输入电压,使用滤波器测试输出结果。输出结果如图8所示。
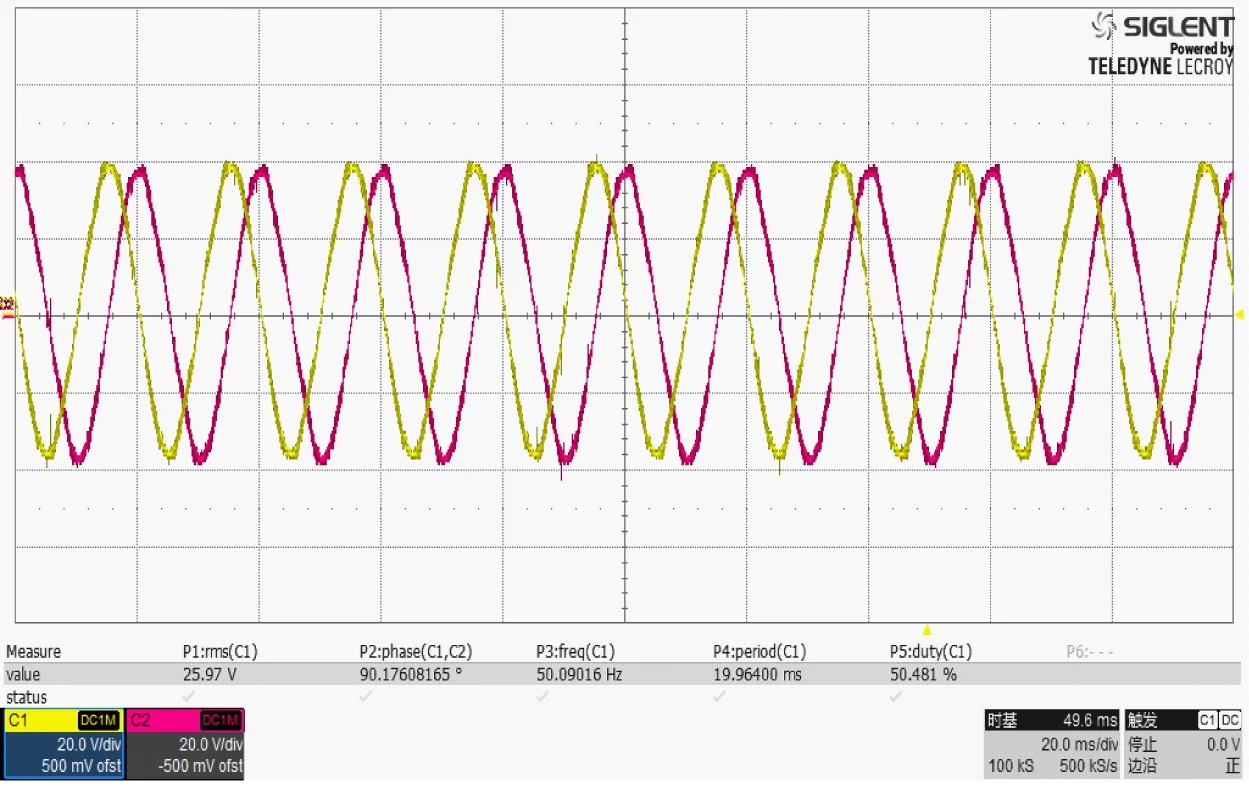
(a) 50 V>
图8波形图中C1与C2并分别代表逆变器两相输出,两相输出在升压过程中的相位差如图中P2,始终保持约90°的输出,误差不超1°。输出平均电压均为输入电压的1/2,波形稳定,验证了以上SVPWM的逆变算法正确,双相感应电动机控制实验装置能实现对双相电动机的稳定控制。
4 结 论
双相感应电动机控制实验装置采用SVPWM技术对双相电动机进行驱动已经通过实验验证,能够实现对双相感应电动机的有效控制,能够输出稳定的互差90°的电压波形。将该实验引入电动机教学实践,能够补充目前双相电动机控制实验教学的空白,能全面提升学生对于电动机控制的认识,学习与了解到对新型SVPWM技术的应用。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
现代食品科技(2022年8期)2022-09-02
山东冶金(2022年2期)2022-08-08
中学生数理化·高一版(2022年3期)2022-04-05
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
现代临床医学(2021年4期)2021-07-31
初中生学习指导·提升版(2020年10期)2020-09-10
中成药(2018年12期)2018-12-29
中学生数理化·七年级数学人教版(2017年4期)2017-07-08