
数据机理混合驱动的交通车意图识别方法*
2022-08-04 07:19宋东鉴吴杭哲韩嘉懿刘宇翔
汽车工程 2022年7期
赵 健,宋东鉴,朱 冰,吴杭哲,韩嘉懿,刘宇翔
(1. 吉林大学,汽车仿真与控制国家重点实验室,长春 130022;2. 中国第一汽车集团有限公司智能网联开发院,长春 130011)
前言
随着汽车智能化技术的不断发展,智能汽车所面临的交通场景更加复杂,为应对复杂交通态势下的自动驾驶任务,高等级智能汽车必须具备对周围相关交通态势的感知和认知能力,而交通车的意图识别是其中的重要内容。
目前用于车辆意图或行为识别的方法可分为机理建模和数据驱动两类。机理建模通常利用车辆运动学模型、对行为决策过程的抽象表征、人为制定的规则识别交通车行为;数据驱动方法则将意图识别视为机器学习中的分类问题,通过学习型算法构建意图分类器。
机理模型方面,谢枫等利用车辆侧向速度和横摆角速度,结合高精度地图进行车辆意图识别。谢辉等通过定义相似度函数,根据车辆与当前车道中心线的位置误差和航向角误差计算相似度函数,通过手写规则建立了车辆意图识别体系。近年来,也有研究将车间的交互关系引入机理建模当中。Bahram 等基于非合作博弈对可能发生的交通场景进行全面考量,通过构建成本地图描述被识别车辆和周围相关车辆之间的交互关系,进而构建意图识别模型。
数据驱动方法方面,以隐式马尔科夫模型(hidden Markov model,HMM)为代表的动态贝叶斯网络在概率图模型基础上引入时间流,在处理具有时序依赖性的意图识别问题上效果较好。支持向量机等也被用于车辆意图识别。近年来考虑车间交互机制的深度学习方法开始用于车辆意图识别和运动预测,其中以长短期记忆(long-shot term memory,LSTM)和门控循环单元(gated recurrent unit,GRU)两种循环神经网络模型及其变体的应用最为广泛。季学武等基于LSTM 网络构建交通车意图识别模块,以被预测对象和周围相关车辆的位置和速度信息为输入进行意图识别。Dai 等通过改进LSTM 网络结构建立车辆空间交互关系。宋晓琳等基于条件随机场(condition random field,CRF)与注意力机制下的LSTM,构建了换道意图识别方法。蔡英凤等将LSTM 和卷积神经网络(convolutional neural networks,CNN)相结合,考量车辆社交特征信息,通过注意力机制提升了算法的特征表达能力。图神经网络由于其强大的表现力也开始被应用在车辆行为识别和预测。Zhao 等将CNN和GRU相结合,利用CNN学习复杂拓扑结构以捕获空间依赖性,利用GRU 学习数据时序上动态变化以捕捉时间依赖性,进而构建时间图卷积网络模型用于城市道路路网下的交通预测。Jeon等基于边缘增强图卷积神经网络(ECGN)建立车间交互关系模型,利用具有编码器(encoder)-解码器(decoder)架构的LSTM网络进行车辆运动预测。
目前的数据驱动方法普遍通过完全黑盒化的模型从被识别车辆及其周围相关交通车的基础运动学信息中提取车间的隐式交互依赖关系,再通过LSTM等对序列的时序关系进行处理,这样的架构被证明能够实现较高精度的意图识别或运动预测。但模型效果受训练数据影响较大,且由于不同驾驶人在相同交通态势下行为决策的差异性和非理智驾驶行为,导致自然驾驶数据中存在着异质性的车间交互和依赖关系,使得完全黑盒模型在部分场景中的泛化能力可能不如机理模型稳定,且不具备良好的可解释性。
针对上述问题,本文从驾驶行为内在生成机理出发,站在被识别车辆驾驶人的角度,分析其从产生驾驶意图到寻找执行时机、再到执行操作控制车辆完成驾驶意图的全过程,论述其中各阶段的内在机理、可供利用的显式信息和对应的建模方法,通过构建数据机理混合驱动架构将具有明确时序关系的各阶段对应的模型进行融合,构建数据机理混合驱动的交通车意图识别方法。
本文的主要贡献为:(1)通过建立驾驶行为时间轴,明晰了驾驶行为的产生过程,并按照时序关系将交通车行为识别问题拆解为驾驶人意图预测、换道可行性分析和车辆行为识别3 个层次,提升了模型的泛化性和可解释性;(2)站在被识别车辆驾驶人的角度,基于马尔可夫决策过程(Markov decision process,MDP),通过量化不同交通态势下驾驶人对各驾驶行为收益的认知,从驾驶人驾驶行为生成机理角度出发建立了驾驶人意图预测模型;(3)通过建立换道可行性分析模型表征驾驶人对于换道时机的把握和判断,并进一步构建数据机理混合驱动架构,将考虑机理的驾驶人意图预测和换道可行性分析与数据驱动的车辆行为识别进行结果级融合,利用机理模型延长提前识别时间,利用数据驱动方法保证识别准确率,最后通过与目前主流的考虑车间交互的深度学习模型对比,证明了本文提出方法在识别准确率、提前识别时间和模型可解释性上的优势。
1 驾驶人换道过程分析与方法架构设计
驾驶人的换道行为可分为两类,一是根据驾驶任务需求产生的强制换道,如为上下匝道或换至转弯车道等而采取的换道行为;二是驾驶人的主动换道即自由换道,驾驶人基于对交通态势的分析,为了追求更高的行驶效率、行驶安全性等产生换道意图,可基于经验和规则进行收益分析,从而推断驾驶人意图。本文以自由换道行为为研究对象,建立了如图1 所示的换道行为时间轴和意图识别方法架构,一次换道行为的完成需经过以下阶段:
阶段I:外界交通态势刺激驾驶人产生换道意图,并寻找目标车道。该阶段为驾驶人的内在思考过程,没有可直接获取的显式特征,只能通过抽象建模分析交通态势与驾驶人意图之间的映射关系,进行驾驶人意图预测。
阶段II:针对性感知、认知交通态势,寻找换道时机。驾驶人感知交通态势时可观测的显式特征包括其头部、眼部等移动,基于这些显示特征可以对驾驶人的意图进行提前识别;而驾驶人对交通态势的针对性认知则难以直接通过显式特征表达,需通过抽象模型表征驾驶人分析换道可行性和寻找换道时机的过程。
阶段III:驾驶人执行操作,控制车辆完成换道。当驾驶人认为换道时机到来时,开始执行转动转向盘、踩下油门/制动踏板等具体操纵行为以改变车辆的运动学、动力学状态,从而控制车辆完成换道。该过程可观测的显式特征可分为两类,一是驾驶人的手动和脚动等生理信息,二是车辆的运动学、动力学参数信息。
在非网联环境下,无法获取被识别车辆(predicted vehicle,PV)驾驶人的头眼动和手脚动等生理信息,因此难以构建PV 驾驶人意图识别模型。如图1 所示,本文根据目前交通环境和车辆感知技术可观测的PV相关信息,面向驾驶人换道的各个阶段进行建模:(1)面向阶段I构建基于MDP 的驾驶人意图预测模型,MDP 的基本原理与驾驶人驾驶行为生成机理高度吻合,因此通过奖励函数的合理设计,MDP 能够有效描述驾驶人“趋利避害”的基本驾驶原则,从而从驾驶行为生成机理角度出发,在驾驶人执行操纵行为前预测其意图;(2)面向阶段II构建基于动态行车安全场的换道可行性分析模型,驾驶人在评估换道可行性和寻找换道时机时会对影响其驾驶行为的交通态势进行主观且连续的认知,选用安全场这一描述交通态势的经典模型,并进一步地在其空间属性基础上引入时变属性,从认知机理角度来表征驾驶人分析换道可行性和选择换道时机的过程;(3)面向阶段III 构建基于双向长短期记忆(bidirectional long-short term memory,Bi-LSTM)的车辆行为识别模型,Bi-LSTM 善于基于历史信息,从正反两方向提取时间序列中的依赖关系,能够从数据驱动角度识别已经在运动学上显著的车辆行为。最终通过构建数据机理混合驱动架构将上述3 组具有明确时序关系的模型进行融合得到本文提出的交通车意图识别方法(中同时包含意图预测和行为识别,为描述方便写作意图识别)。
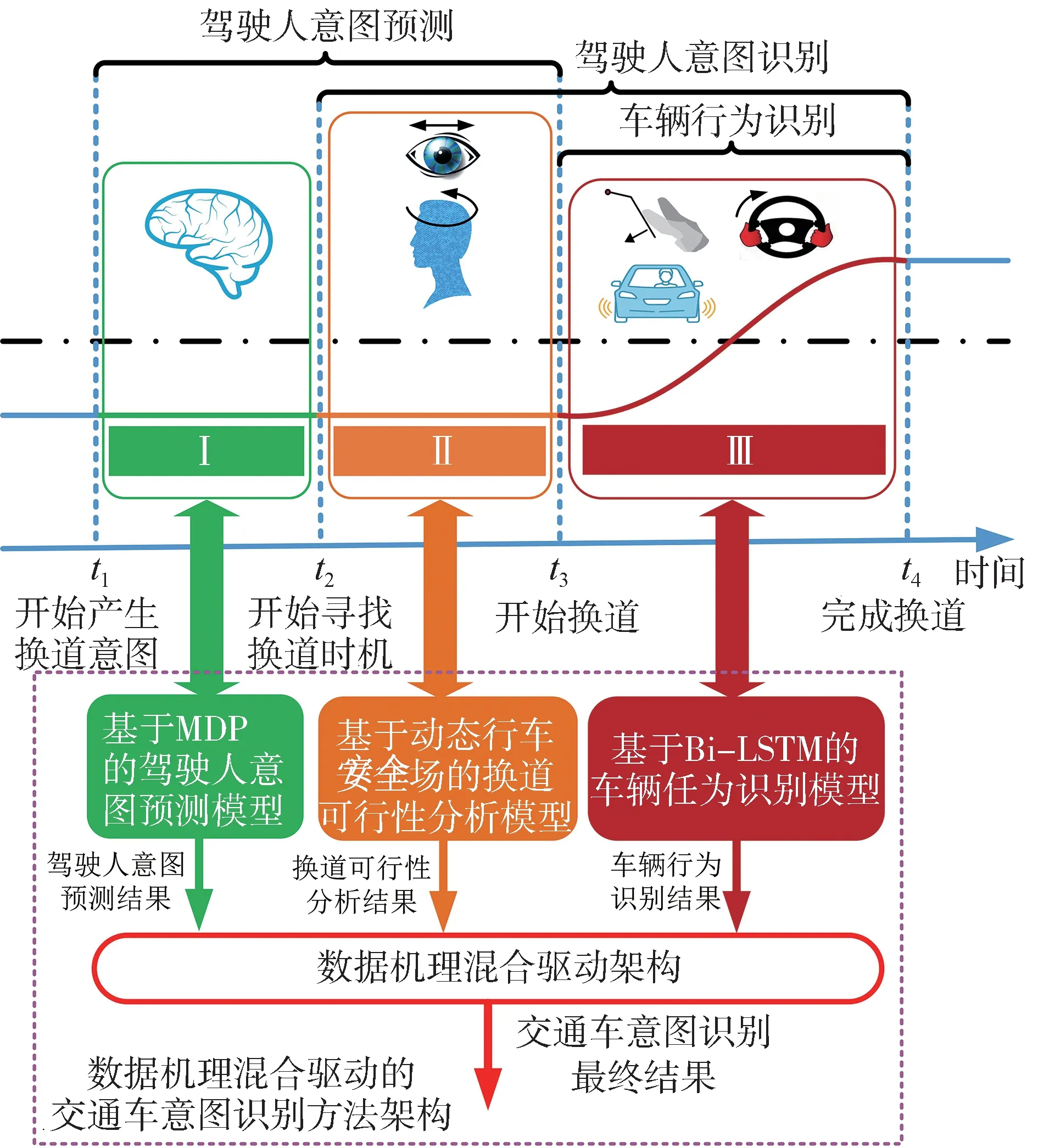
图1 驾驶人换道行为时间轴与意图识别方法架构
2 基于MDP的驾驶人意图预测模型
2.1 MDP建模
意图预测模型本质上是对当前交通态势与驾驶人意图的映射关系建模。驾驶人产生意图的思考过程可以描述为,基于驾驶人本身的认知特性,分析当前交通态势,预测执行各种驾驶行为后面临的新的交通环境和获得的收益,从中选择收益最高的行为作为当前的驾驶意图,这与1阶MDP类似,因此将驾驶人驾驶意图的产生建模为MDP(,,,),其中为状态空间,为动作空间,为状态转移概率,为奖励函数,在该MDP 中即为执行某种驾驶行为带来的收益。s表征PV 在时刻所处的交通环境,包含PV及其周围相关交通车的运动学状态信息;动作空间包含左换道(lane changing to left,LCL)、车道保持(lane keeping,LK)和右换道(lane changing to right,LCR)这3种驾驶行为;驾驶人在当前状态s执行动作a后转移至状态s,并获得行为收益(a,s),其中a∈{,,}。
假设驾驶人均是理智的,在执行驾驶行为时遵从“趋利避害”的基本原则,则可通过计算在当前交通态势下各驾驶行为的收益对驾驶人采取某种驾驶行为的倾向性进行判断,以预测驾驶人意图。如图2 所示,本文假设PV 驾驶人的意图主要受周围6 台车辆的影响,即当前车道前车(front vehicle,FV),当前车道后车(rear vehicle,RV),左车道前车(leftlane front vehicle,LFV),左车道后车(left-lane rear vehicle,LRV) ,右 车 道 前 车(right-lane front vehicle,RFV),右车道后车(right-lane rear vehicle,RRV)。

图2 影响PV的周围相关车辆
行为收益(a,s)应能够体现PV驾驶人对当前交通态势的认知和对各驾驶行为产生收益和损失的判断。本文设计速度收益、跟驰安全性收益、跟驰空间收益、换道碰撞风险和舒适性损失来综合表征行为收益:

式中为收益权重矩阵。本文基于Softmax 函数结构建立驾驶人意图预测结果与驾驶行为收益之间的映射关系:
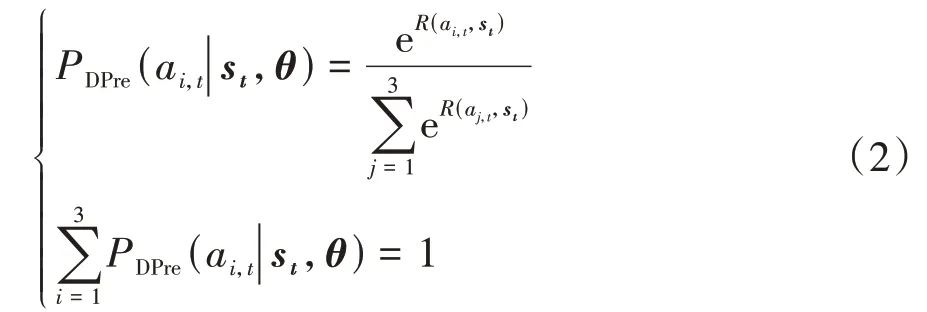


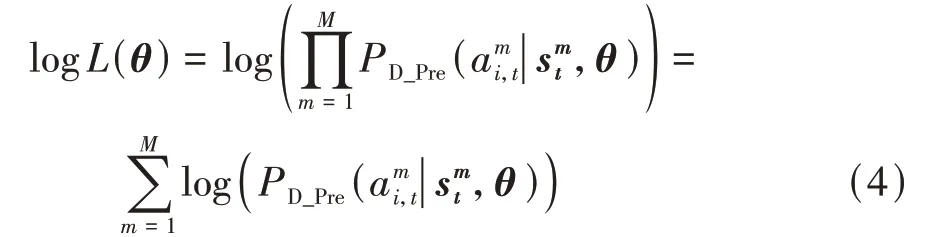
可假设中各组数据独立同分布于式(2)所表征的概率分布,则关于待征参数的对数似然函数为


2.2 MDP状态转移过程
对于该MDP,从s到s 的一步状态转移包含了执行一次完整驾驶行为的全过程,而非传统意义上MDP 的单时间步状态转移,因此需要对PV 驾驶人执行某种驾驶行为的预期轨迹和执行该驾驶行为过程中周围相关车辆的运动轨迹进行预测。
2.2.1 PV预期车道保持轨迹预测
对于采取车道保持行为的PV,若不存在FV,可直接利用恒加速度模型预测PV的预期运动轨迹;若PV 跟驰FV 行驶,则利用智能驾驶员模型(intelligent drvier model,IDM)预测PV的纵向加速度():
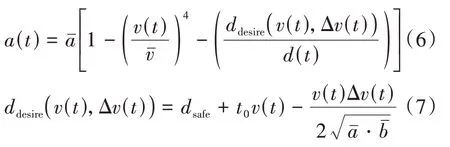
式中:Δ()和()分别为PV 与FV 之间的相对速度和车距;((),Δ())为期望跟车距离。期望速度ˉ、最小安全车距、期望跟车时距、最大加速度ˉ和最大减速度ˉ为待标定参数。本文采用全局最小二乘法,以最小化IDM 输出的加速度和NGSIM中人类驾驶人真实加速度之间的均方误差为目标进行参数标定,参数标定结果如表1所示。

表1 IDM参数标定结果
2.2.2 PV预期换道轨迹预测
对于执行换道行为的PV,其换道轨迹预测不同于已知一段PV的历史运动学轨迹预测其未来轨迹,而是在PV 还未在运动学特征上表现出换道倾向时进行提前预测,即若当前时刻驾驶人控制PV执行换道操作,驾驶人预期的换道轨迹应是什么形式。本文采用5 次多项式拟合从轨迹规划角度进行PV 驾驶人预期的换道轨迹预测。
以PV 当前位置为原点,以PV 行驶方向为轴正方向,轴与轴垂直,进而建立直角坐标系,则PV预期换道轨迹描述为





图3 换道持续时间概率密度分布

式中和分别为对数正态分布的均值和方差。
图4给出了不同换道初始速度下的换道持续时间概率密度分布对比,由图4(a)可知,当换道初始时刻的速度在6-14 m/s 之间时,换道持续时间的分布较为接近,因此对6-14 m/s 的换道持续时间分布进行统一描述,得到如图4(b)所示的3组概率分布,表2给出3组对数正态分布参数。
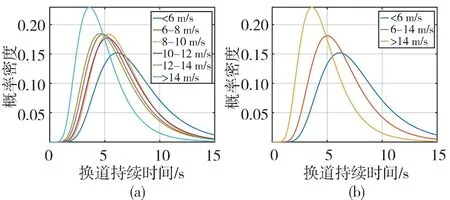
图4 换道持续时间概率密度分布对比

表2 对数正态分布参数
为了排除小概率数值的影响,取对数正态分布的90%置信区间绘制了如图5 所示的箱型图,并以90%置信区间内的数学期望作为该速度区间内的换道持续时间,如表3 所示。基于对不同初始速度下换道持续时间的分析,能够在给定初始边界条件下,根据换道持续时间对驾驶人的预期换道轨迹进行预测。
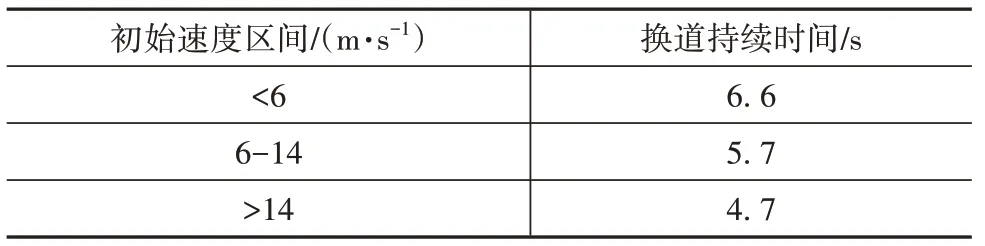
表3 不同换道初始速度下的换道持续时间

图5 换道持续时间箱型图
2.2.3 PV周围相关车辆运动轨迹预测
人类驾驶人在进行行为决策时,通常会预测周围相关车辆的运动,从而对将要采取的驾驶行为进行评估。对PV 周围车辆的运动轨迹预测是基于其历史运动学信息和当前运动状态进行的,通过具有序列到序列(sequence to sequence,Seq2seq)结构的LSTM 网络再现PV 驾驶人对周围车辆的预测过程,网络结构如图6所示。
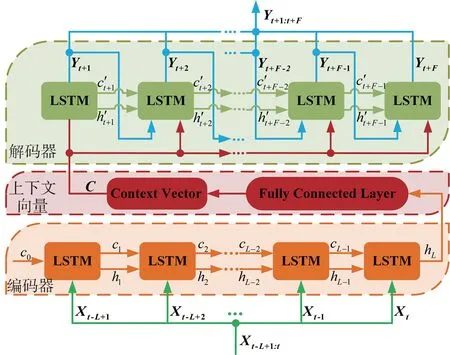
图6 基于Seq2seq的PV周围车辆轨迹预测模型结构
设时刻Seq2seq 网络的输入为长度的历史时间窗内的特征序列X ,输出为预测时间窗内的预测轨迹Y :

式中:和分别为被预测周车与PV 的相对纵、侧向位置;、为被预测周车的纵、侧向速度;、为被预测周车的纵、侧向加速度。基于NGSIM数据集对Seq2seq模型进行训练和测试。为计算PV驾驶行为的收益值,需要对图2 所示的PV 周围6 台车在PV 换道持续时间内的轨迹进行预测,即预测时窗应当取表2给出的3组不同换道持续时间。
不同长度预测时间窗下测试集的预测误差如表4 所示,预测误差随着预测时间窗长度变长而增加,误差随时间的累计效应较为明显。但是驾驶人意图预测模型中对PV 周车轨迹预测的精确性要求并不高,因为该部分预测仅用于表征PV驾驶人对交通态势大致判断,因此较大的误差是可以接受的。图7给出了预测时间窗长度为4.7 s时NGSIM中某PV周围6台车的轨迹预测结果。

表4 不同预测时间窗下的RMSE
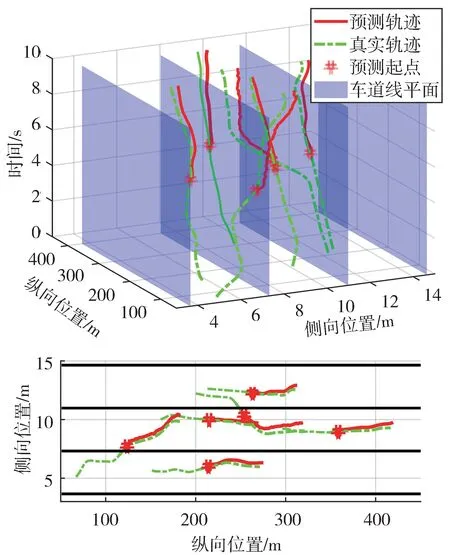
图7 预测时间窗为4.7 s时PV周围车辆轨迹预测结果
2.3 驾驶行为收益
(1) 速度收益
设PV 当前车道前车FV 车速为,目标车道前车(target-lane front vehicle,TFV)车速为,LC(lane changing)泛指所有换道行为,则PV 的速度收益为

(2) 跟驰安全性收益评估
通过危险感知系数表征PV 跟驰过程中的安全性收益:
式中:和分别为PV 与跟驰目标的车头时距和碰撞时间倒数;、为线性加权系数。
(3) 跟驰空间收益
PV 执行换道操作的另一重要诱因是渴望获得更大的跟车距离以进行更安全舒适的跟车行为,PV的跟驰空间收益可表征为

式中和分别为PV与FV和TFV的纵向距离。
(4) 换道碰撞风险
车辆换道过程中的碰撞风险通常来自于目标车道前车TFV 和目标车道后车(target-lane rear vehicle,TRV)。驾驶人对于换道碰撞风险的认知是一个连续过程,不能以是否碰撞评价,因此本文利用PV 执行换道后与TFV 和TRV 到达临界碰撞点的时间差来量化表征驾驶人对换道碰撞风险的评估。
图8分析了PV 执行换道操作后与TRV 可能出现的碰撞情况。图8(c)给出了PV 与TRV 发生碰撞的中间情况,即PV车身刚刚进入TRV 轨迹,PV车头便与TRV车头发生“点接触”,设点C为临界碰撞点。利用两车到达临界碰撞点的时间差来表征换道过程中来自于TRV的碰撞风险:
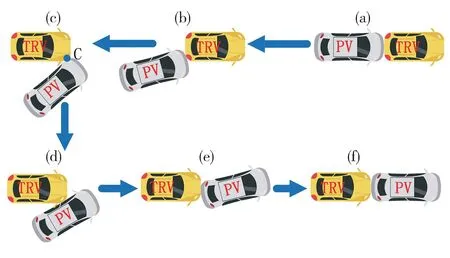
图8 PV与TRV发生碰撞情况
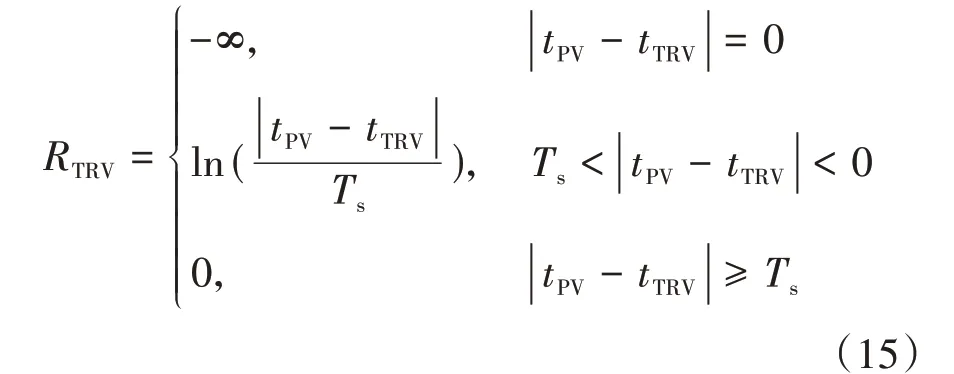
式中:和分别为PV 与TRV 到达临界碰撞点C的时间;为安全时间差阈值。同理可得PV 换道过程中由TFV 所产生风险的评估指标。则换道碰撞风险为

(5)舒适性损失评估
车辆的变速运动会造成驾驶人的舒适性损失,且应当同时考虑纵向和侧向的舒适性,则定义舒适性损失为

若PV 执行,则可以近似认为不存在侧向舒适性损失。以上驾驶行为收益和损失的计算均基于对PV预期轨迹及其周围相关车轨迹的预测。
3 基于动态行车安全场的换道可行性分析模型
由图1 所示的换道时间轴可知,驾驶人在产生换道意图后,会根据交通态势评估换道可行性并选择换道时机。BALAL 等指出,驾驶人选定目标车道后,可以认为影响其评估换道可行性和选择换道时机的主要为FV、TFV、TRV。在现实交通环境中,驾驶人在选择换道时机时需综合考量上述车辆的位置、车速和运动趋势等对自车产生的影响,这是一个连续的过程。本文通过行车安全场表征驾驶人对影响其换道行为的交通态势的认知,进而构建换道可行性评估模型。
本文在常规安全场的空间属性基础上引入时变特性,则车辆在时刻对场中物体产生的场强():
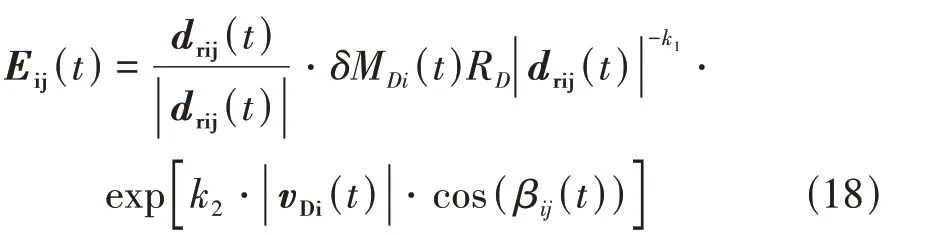

式中()为车辆在时刻的等效质量,与车辆类型、体积、质量、速度有关,定义为

式中:m为车辆质量;V为车辆体积系数;Q为车辆类别;-为待定常数项。图9 给出了NGSIM 中某场景下,在PV 换道起始时刻FV、TRV、TFV 的场强分布图。
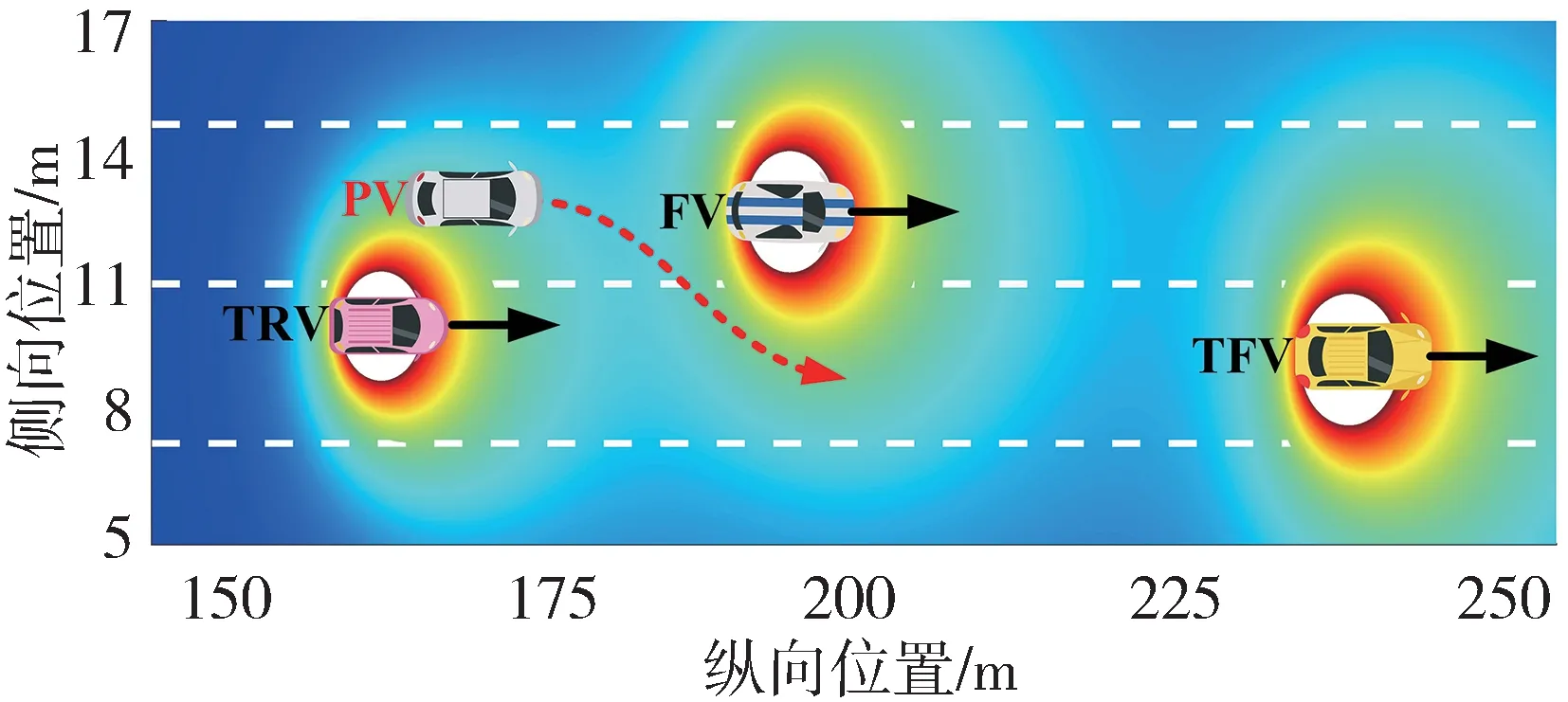
图9 换道起始时刻FV、TRV、TFV场强分布
驾驶人选择换道时机时会面向整个预期的换道过程而不是某一个时间点进行换道可行性评估。基于第2 节中对PV 预期轨迹与其周围相关车辆轨迹的预测,本文在安全场中引入时变特性来考量整个换道过程中FV、TRV、TFV 施加给PV 的影响,定义换道可行性因子为
式中:为换道初始时刻;E()为车辆在时刻施加给PV 的场强;E()表征PV 在换道过程中能够接受的来自车辆的最大临界场强。假设PV换道过程中与车辆的最小距离刚好满足式(7)中的最小安全距离,则根据车辆的当前运动状态及对其未来轨迹的预测,可求得该假设成立情况下车辆在时刻所处的位置,进而可根据PV 和车辆的运动状态求得|E()|。
4 基于Bi-LSTM 的车辆行为识别模型
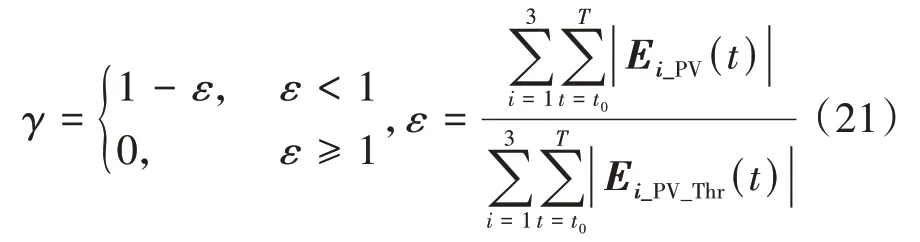
在第2 节中,基于MDP 从驾驶人驾驶行为生成机理角度对其意图进行预测,但是这建立在驾驶人遵循“趋利避害”原则的假设上,在实际情况中并非所有驾驶行为均能够用行为收益进行解释,本文中从速度、距离和安全性3 个维度评价了NGSIM 数据集中的1 657组自由换道行为的驱动诱因,结果如表5 所示。在表5 中,1 代表该换道行为中存在该类型的驱动诱因,0 代表不存在,可以看到速度、距离、安全性优势虽然能覆盖大部分的换道行为,但是仍有9.58%的换道行为无法用上述驱动诱因解释。因此为了避免基于MDP 的意图预测模型输出错误意图,建立了考量PV 历史运动学信息的车辆行为识别模型。车辆运动学信息是车辆行为最直接的反应,但考虑到驾驶人的操纵随机性,在识别PV已经发生的驾驶行为时,应考虑一定时间域内的运动学信息,进行“序列到类别”的分类。本文中构建双向多长短期记忆网络Bi-LSTM从自然驾驶数据中学习得到历史运动学信息与车辆行为之间的映射模型,基于数据驱动实现对PV已经发生的驾驶行为的识别,对应于图1所示的换道时间轴上的阶段III。
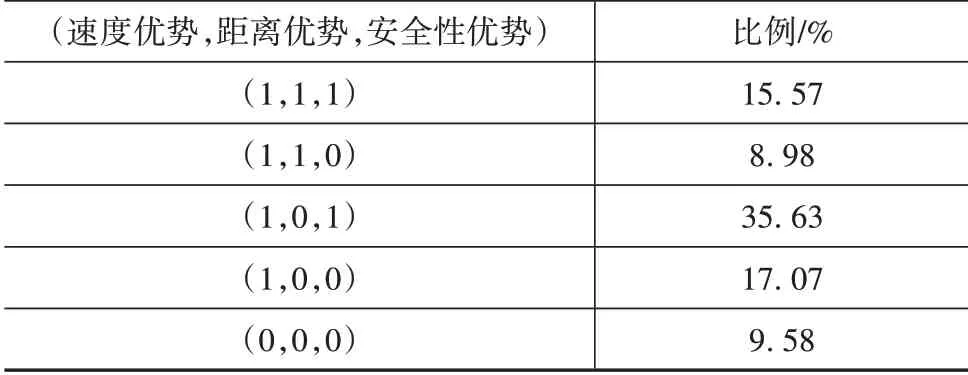
表5 换道行为驱动诱因统计
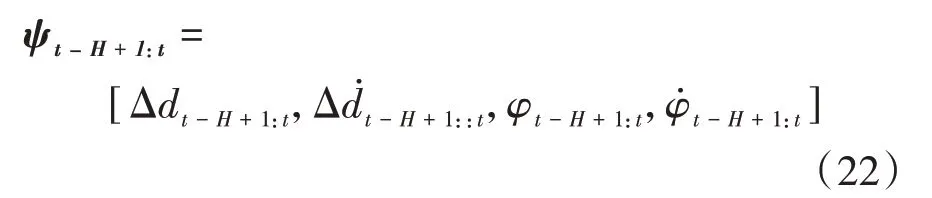
Bi-LSTM 网络结构如图10所示,网络输入为PV的历史运动学时序特征:
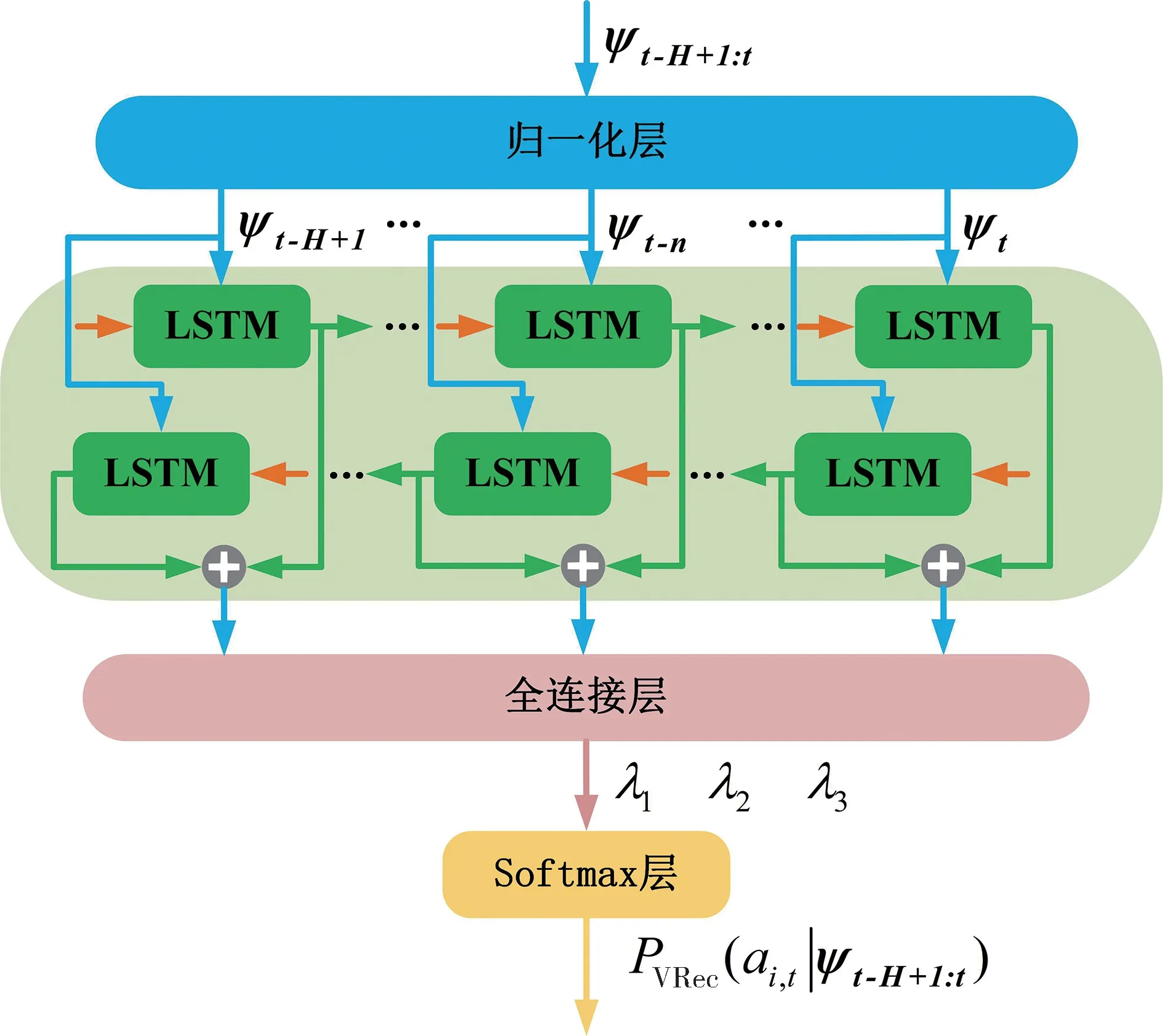
图10 Bi-LSTM网络结构


5 数据机理混合驱动架构构建与识别结果验证
5.1 数据机理混合驱动架构
本文中构建了如图11 所示的数据机理混合驱动架构,将上述3 个模型进行时序耦合,设判别阈值为。PV 及其周围相关交通车信息输入后,基于MDP 的驾驶人意图预测模型、基于Bi-LSTM 的车辆行为识别模型、基于动态行车安全场的换道可行性分析模型分别输出驾驶人意图预测概率(a)、车辆行为识别概率(a)和换道可行性因子。若() <,说明当前交通态势并不足以刺激驾驶人产生换道意图,则输出最终识别结果(a)=(a);若() ≥,说明当前交通态势已能够刺激驾驶人产生换道意图。本文通过换道可行性因子将(a)和(a)结合,越大表征此时换道可行性越高,因此越倾向于相信驾驶人意图预测结果,则混合驱动的意图概率为
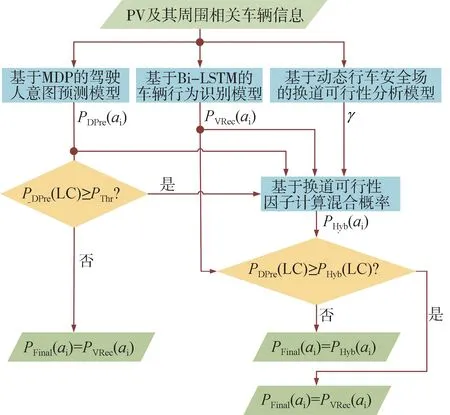
图11 数据机理混合驱动的交通车意图识别架构
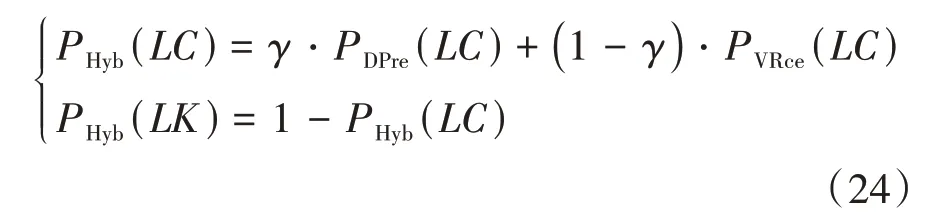
由前文对换道行为驱动诱因的统计分析可知,并非所有驾驶人的换道行为均是理智的,且侵略性较强的驾驶人在换道可行性较低时也可能执行换道,因此本文设置了第2 层判断逻辑,即选择充分相信车辆行为识别结果,当() ≥()时,即使此时的换道行为收益并不充分或换道可行性较低,依然认为PV发生了换道行为:

5.2 数据预处理
本文使用NGSIM 数据集进行模型标定、训练和测试。NGSIM 由美国联邦公路局采集,采样周期0.1 s,包含在公路I-80 和US-101 上于不同时间段采集的数据,涵盖采集时段内出现的所有车辆信息,数据处理过程如下:
(1)根据车道编号变化,提取所有发生换道行为的数据段;
(2)由于本文主要关注车辆的自由换道行为,因此去除涉及汇入及驶出匝道而采取的换道行为和连跨多条车道的换道行为,以避免强制换道因素对模型训练和标定产生影响;
(3)由于NGSIM 原始数据中存在大量噪声和误差,本文使用时间窗长度为2 s、3 阶多项式拟合的Savitzky-Golay滤波器对原始数据进行处理;
(4)以换道轨迹与车道分界线的交点为换道点,计算每个采样点的车辆偏航角,从换道点开始,沿时间轴正方向遍历每个采样点的偏航角,若连续5个采样点的||≤(换道起始点航向角阈值),则将第1 次满足||≤的采样点定义为换道起始点;采用同样方法,通过判定||≤可确定换道终止点;
(5)为对驾驶人意图预测模型进行训练和测试,在换道起始点处向前扩展长度为3 s 的车辆车道保持数据,并将其与换道起始点和换道终止点之间的数据进行组合作为一次完整的换道行为,最终共提取1 657 次有效的自由换道数据,同时提取了1 231次稳定的车道保持数据,按照80%和20%划分训练集和测试集。
取的输入序列长度为4 s,图12 给出了在一次意图识别过程中的表现,如图12(a)所示,PV在5 s 时越过车道分界线,该点即为换道点,取阈值= 0.6。从图12(b)和(e)的对比可以看出,能够在PV处于车道保持阶段即实现对PV驾驶人意图的提前预测,而仅使用PV历史运动学特征的车辆行为识别模型则只能在PV 的换道行为在运动学上显著之后才能正确识别出。基于对交通态势的分析和预测计算驾驶行为收益进而预测PV 驾驶人意图,如图12(c)所示,从0 时刻开始即超过,表明PV 驾驶人已经产生了意图,但由图12(d)可知由于左换道可行性因子()在0-1.2 s之间未上升至足够高的数值,说明驾驶人尚未找到合适的时机执行,因此图12(e)中的在阈值附近上下波动,从而出现了图12(f)中在和之间不断切换的情况。在1.2 s后,()开始稳定上升,说明换道时机已经到来,开始稳定超过,识别PV 意图为。如图12(b)和图12(e)所示,()在3.4 s 处开始大于(),说明此时PV 已经开始在运动学上表现出特征,选择相信车辆行为识别结果(),至此()识别概率迅速上升至100%。
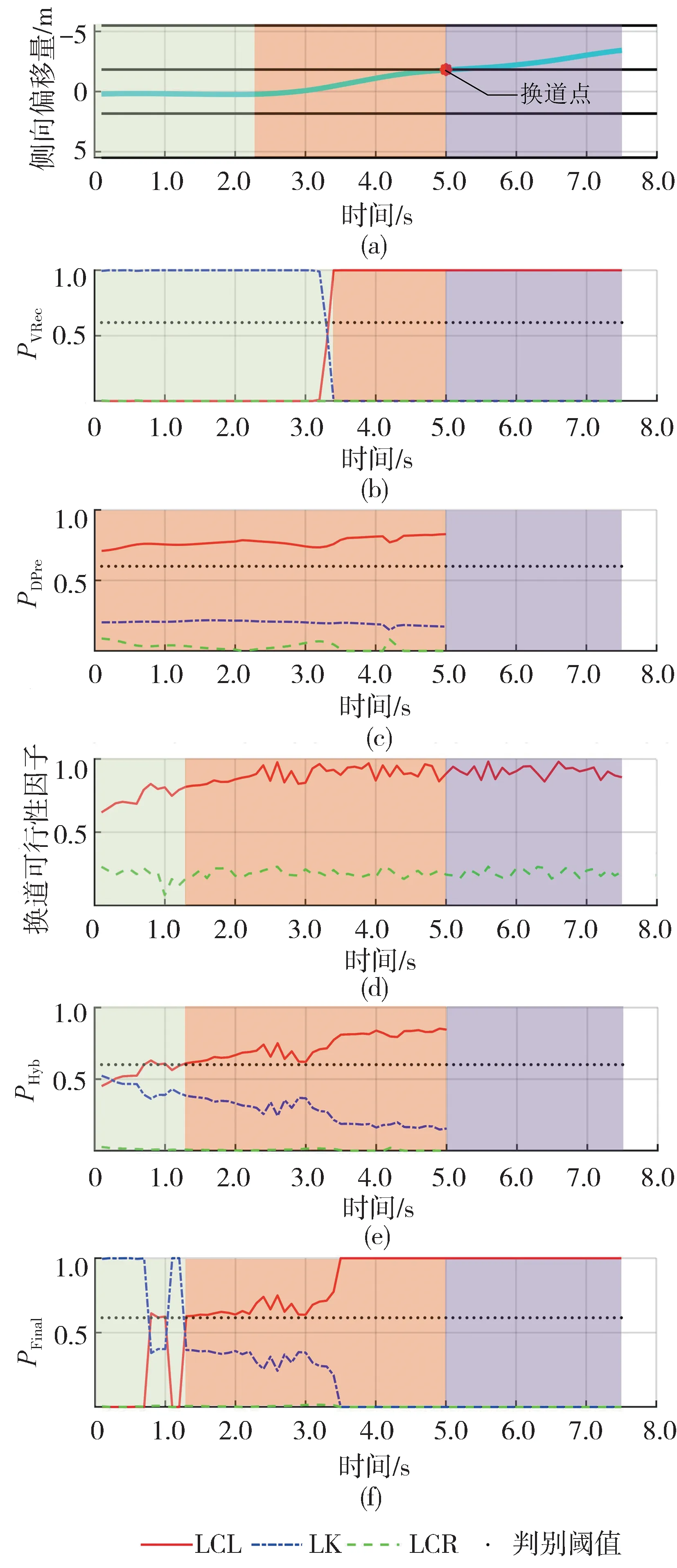
图12 交通车意图识别过程
表6给出了在测试集中,在换道点处的意图识别混淆矩阵,可以看到能够精准识别3 种意图。此外,为充分验证本文提出方法的有效性,本文构建了5 个对比模型:以PV 运动学信息为特征值,基于HMM 进行PV 行为识别,记为HMM;以PV 运动学信息为特征值,基于Bi-LSTM 进行PV 行为识别,记为Bi-LSTM-1;在PV 运动学信息基础上,加入PV周围车辆的速度及与其PV 的相对位置信息作为特征值,基于Bi-LSTM 进行PV 意图识别,记为Bi-LSTM-2;在Bi-LSTM 基础上,引入条件随机场(conditional random field,CRF)以考虑意图的前后依赖性,记为Bi-LSTM-CRF;建立包含PV 本身信息、周围相关车辆信息和道路信息的社交特征集合,通过CNN 提取PV 的社交特征信息,利用具有注意力机制的LSTM 模型进行PV 意图识别,记为Social-LSTM。上述模型与采用完全相同的训练集和测试集,图13 给出了6 种模型在测试集上意图识别准确率随距离换道点时间变化情况的对比,可以明显看到,仅基于PV运动学信息的HMM 和Bi-LSTM-1在6种模型当中表现最差,Bi-LSTM-1由于模型本身优势,表现略优于HMM,Bi-LSTM-CRF 与Social-LSTM的表现较为接近。
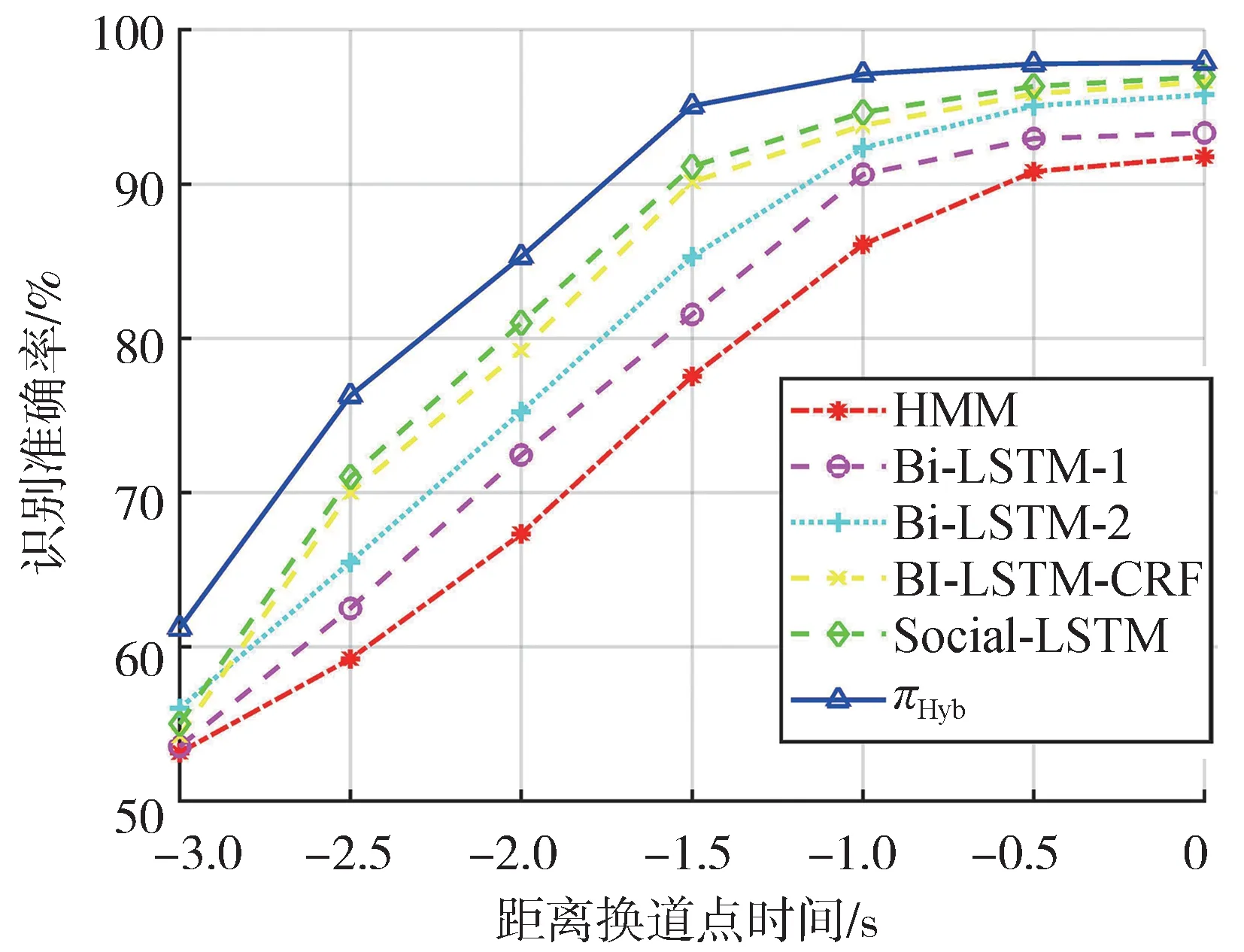
图13 识别准确率对比
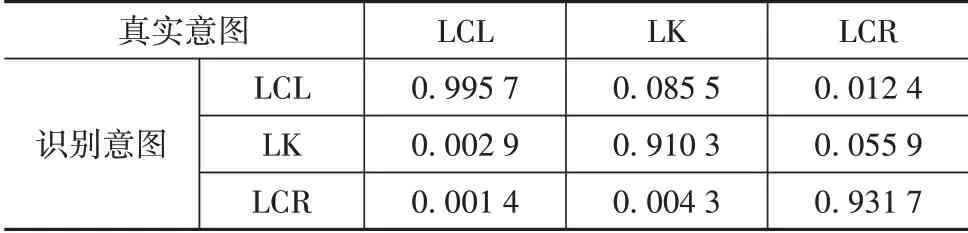
表6 意图识别混淆矩阵
表7 给出了、Social-LSTM 和Bi-LSTM-2 在换道点前1.5 s 处的意图识别性能量化对比。结合图13和表7可以看到,直接将PV和周围车辆的基础运动信息输入网络Bi-LSTM-2 虽然相较HMM 和Bi-LSTM-1 性能有所提升,但由于其并没有对车间的深层依赖关系进行提取和建模,因此提升效果并不明显,且模型的可解释性较差。Social-LSTM 通过CNN提取车辆的社交信息从而使网络在意图识别时考虑了车间的交互和依赖关系,在识别准确率和提前识别时间上有明显提升。但通过CNN 这样的完全黑盒模型提取隐式特征的方式,缺乏足够的可解释性,虽然在换道点前1.5 s 以内,Social-LSTM 和的识别准确率差距不大,但是在换道点前3~1.5 s 的区间内,的表现要优于Social-LSTM,尤其在换道点前3 s 处,相比其他方法明显具有更高的识别准确率,表明不仅具有较强的可解释性,且能够更早地预测PV意图。
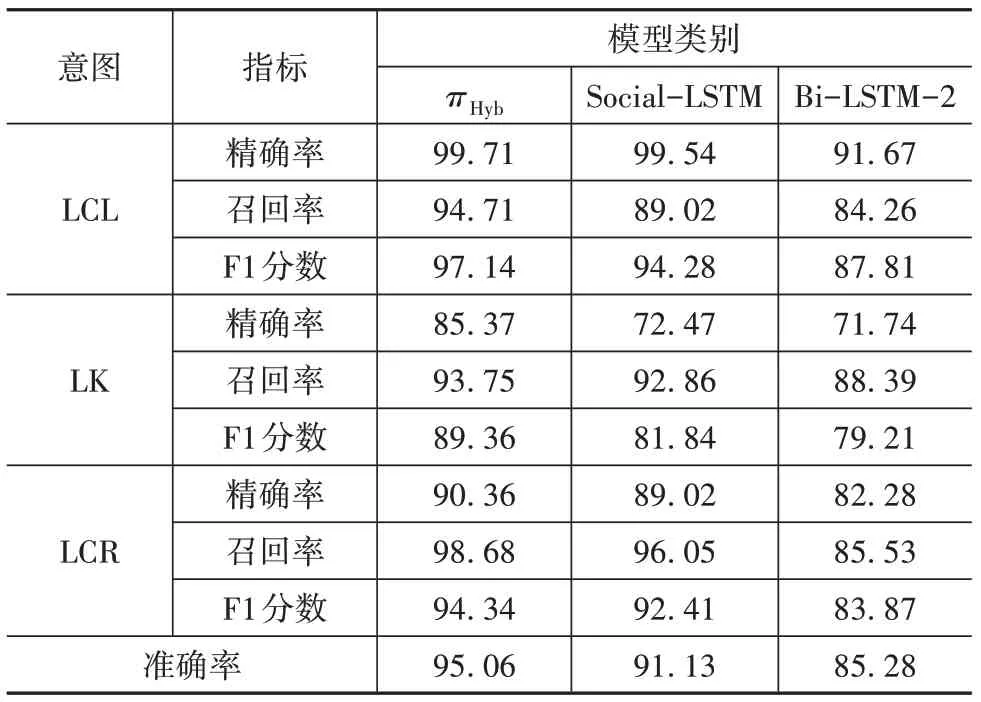
表7 识别性能指标对比 %
此外,根据表5 中对换道行为驱动诱因的统计分析,即使利用自然驾驶数据进行模型标定,但是仅凭意图预测模型仍然无法给出足够高的识别准确率,图13 中换道点前3 s 处的识别准确率虽然高于其他模型,但仍有相当的错误识别率。而这正是本文使用数据-机理混合驱动架构的原因,通过驾驶行为机理模型延长提前识别时间,而数据驱动的车辆行为识别模型则保证了足够高的准确率,最后通过换道可行性分析将两者有效结合,在换道点前1.8 s左右识别准确率超过90%,在换道点处识别准确率达到97.88%。
6 结论
本文中针对智能汽车技术领域中的交通车意图识别问题,从分析驾驶人驾驶行为生成机理角度入手,利用非网联条件下车载传感器能够获取的有限交通车信息,面向驾驶行为产生的各阶段分别建立机理模型和数据驱动模型,构建数据机理混合驱动的交通车意图识别方法,并利用自然驾驶数据集NGSIM进行模型训练和验证。结果表明在换道点前1.8 s处识别准确率可达90%,在换道点处识别准确率为97.88%,并从不同建模方法、不同输入特征、不同隐式特征提取方式等维度对进行对比验证,说明了在识别准确率、提前识别时间和可解释性上的优势,能够为智能汽车行为决策和运动规划提供有效支撑,对智能汽车技术发展具有一定意义。但驾驶人行为生成机理很难完全清晰准确的描述,不仅因为该机理本身目前并不清晰,还源于不同类型驾驶人行为的异质性、认知的差异性和时变性等众多复杂因素。将在后续研究中基于数据机理混合驱动构建更加完善的驾驶行为模型,并将其应用于意图识别、轨迹预测和决策规划等研究。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2022年5期)2022-04-02
内燃机与配件(2022年2期)2022-01-17
中学生理科应试(2019年10期)2019-10-30
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
新高考·高一物理(2016年11期)2017-07-07
新高考·高一物理(2016年1期)2016-03-05
