
考虑时延的信号交叉口生态驾驶控制*
2022-08-04 07:19:16陈欣宇钱立军王其东
汽车工程 2022年7期
陈欣宇,钱立军,王其东
(合肥工业大学汽车与交通工程学院,合肥 230009)
前言
智能网联汽车(CAV)是智能车和网联车的结合,能为人们带来更加安全、节能、环保和便捷的交通体验,是现阶段国际上广泛认可的未来发展方向,智能网联汽车的研究已成为不可避免的大趋势。在智能网联的环境下,车辆可与其他车辆通过车-车(V2V)通信交换位置、速度、加速度等信息,也可与路侧单元通过车与交通设施(V2I)通信,获取交通信号等信息。随着研究的开展,智能网联环境下的多车协同控制不但可以提高基础的行驶安全,也为交通流畅性与燃油经济性的提高提供了新的解决思路。
目前,大量文献研究智能网联环境下车辆燃油经济性的优化。Mierlo 等研究了驾驶行为对排放和油耗的影响,表明燃油消耗率也取决于车辆的驾驶行为。Xu 等针对不同坡度的巡航控制提出了采用反馈控制器和高速公路纵向速度规划算法来提高车辆的安全性和燃油经济性。然而在城市交通环境下,路口处出于安全考虑设置的交通信号灯会导致交通流的频繁中断,车辆被迫加速或减速,增加了燃油消耗。为改善此现象,在信号交叉口处的生态驾驶被广泛研究,利用即将到来的信号灯正时(SPaT)信息指导车辆以最优速度接近,穿过和驶离交叉口,通过减少平均停车时间来减少交通拥堵,同时减少燃油消耗和CO排放等。Kamal 等通过当前道路和交通信息,提出了一种交通预测框架,使用模型预测控制(MPC)方法计算最优控制输入,提高了燃油经济性。Homchaudhuri 等提出了一种适用于城市拥堵交通环境下的燃油经济性的控制策略,并进一步采用一种快速模型预测控制(FMPC)策略,减少了计算时间。Wang 等描述了一种CAVs在信号走廊处的合作生态驾驶系统,提出一种领航车和跟随车之间的角色转换协议以应对不同CAV渗透率的状况。
然而,大部分研究均是在理想环境中进行的,通信技术中固有的时延和丢包等不确定性可能导致CAV 的控制性能下降,甚至会危害到行车安全。Molnar 等研究了车队在巡航控制中,通信时延和丢包对队列稳定性的影响,并设计了一种预测器补偿数字控制器中的时延。Gao 等提出了一种针对含有通信时延和不确定动力学的异质车队的控制,保证了车辆的跟踪性能。Liu等推导出了不同控制参数下保证车队内部稳定性和队列稳定性的时延上界。上述研究中的时延多为确定不变的,没有考虑到随机时延或时变时延的情况。同时,研究内容较为单一,主要在车队巡航控制方面,少有研究时延对交叉口生态驾驶策略的影响。此外,目前研究大多仅限于仿真阶段,与实际情况存在一定差距。
针对上述情况,本文中提出一种适用于多个信号交叉口的鲁棒模型预测控制(RMPC)方法。基于SPaT 信息和前车状态得到最优目标车速,对车队的燃油经济性和交通流畅性进行优化;利用时变时延的上下界信息构造Lyapunov 函数,利用线性矩阵不等式(LMI)技术求解反馈控制律,保证时滞系统的鲁棒稳定;最后,进行仿真和智能小车试验,验证所提出方法的控制性能。
1 问题描述与建模
本文中考虑的是车队在城市环境下通过一系列有交通信号灯交叉路口的场景。由于多车道场景包含换道切入等决策,超出本文研究范围,故只选取简化的单车道场景。同时,在智能网联环境下,车辆可以通过V2V 和V2I通信获得前方信号灯的信号定时信息和相邻车辆的速度位置信息,原理图如图1所示。
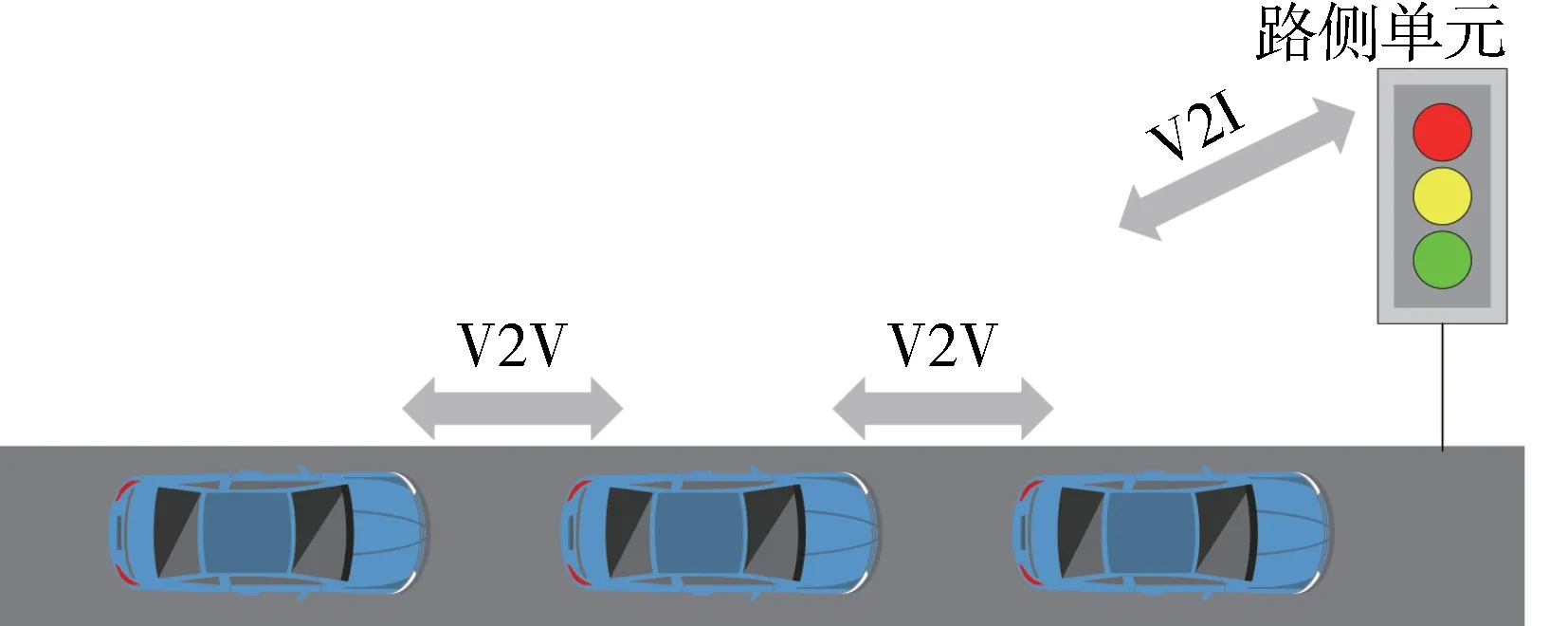
图1 车联网原理图
1.1 车辆动力学与能耗模型
在队列中,第辆车的纵向动力学模型为
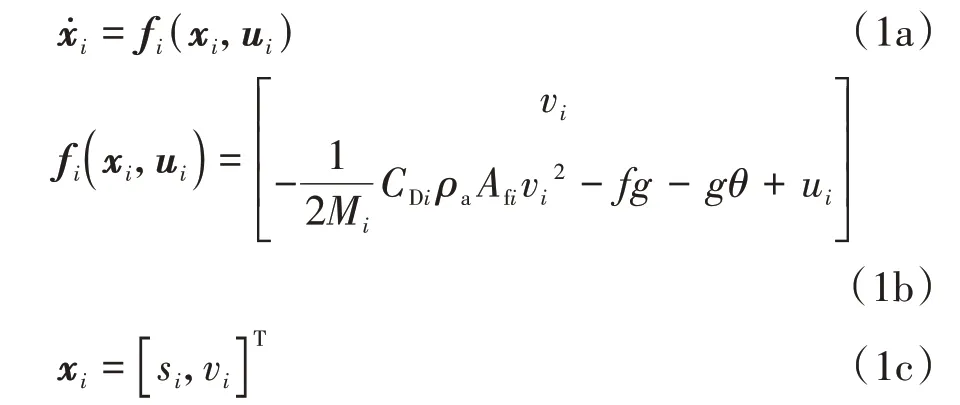
式中:下标表示车辆;x表示状态变量,包括车辆位置s和车速v;u表示单位质量的驱动力或制动力;M、、分别为第辆车的整车装备质量、气动阻力系数和挡风面积;、、、分别表示空气密度、滚动阻力系数、重力加速度和道路坡度。
将动力学模型离散化,得到车辆的状态空间方程:

式中Δ表示离散时间步长。
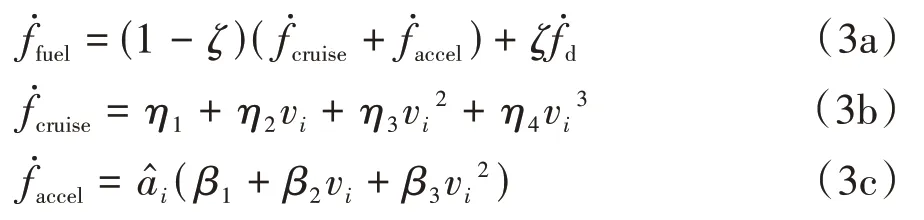
在城市道路环境下,因为交通堵塞而引起车辆频繁的加减速会消耗大量的能耗。为了估算燃油的消耗量,引入一个燃油消耗估算模型:

1.2 目标车速的计算
在智能网联汽车队列协同控制研究中,常用的汽车巡航控制或者跟车模型,都无法避免车辆在交叉路口处因为红灯而停车。在联网的环境下,根据即将到来的交通信号灯的信号定时信息,可计算出目标车速的范围。当车速位于这一范围内时,车辆可有效避免红灯停车,减少停车次数和怠速时间,从而提高交通效率和燃油经济性。基于信号定时的目标车速范围为
式中:、表示能在绿灯时间通过的最高和最低目标车速;表示城市道路条件下最大允许车速;s表示第辆车与第个交通信号灯之间的距离;表示交通信号灯的周期数;、分别表示红灯和绿灯持续时间;表示一个红灯加绿灯的总持续时间即一个循环周期;表示汽车行驶时间;函数mod()表示求余数即求除以的余数。


通过计算式(5b)可以得到经济的巡航车速。考虑到燃油经济性,最优目标车速变为

式中min|-[,]|表示在区间[,]内与最接近的车速。当最优巡航车速位于目标车速区间[,]内时,目标车速选取经济巡航车速;其他情况下,目标车速选取车速区间[,]内与巡航车速距离最近的车速。
同时考虑到车队内的跟车安全性,车辆的目标车速还与前车状态有关。当车辆与前车1 的距离小于预定义的安全距离,且目标车速v大于前车目标车速v时,作为后车的车辆应按式(7)以指数形式减速,从而加大跟车距离,避免发生碰撞:
1.3 问题描述
综合安全性和燃油经济性,定义新的状态变量x′=[Δs,Δv],其中Δs为距离误差,表示跟车距离与安全距离的差值,Δv为速度误差,代表车速与目标车速之间的差值∆v= v- v。

得到新的状态空间方程:

为了便于描述,下文的x′、u′均简化为、。
在通信和控制系统中,数据的感知、传输和处理均需要一定的时间,这些引起的时延均可被认为是输入时延,本文将它们一起等效为时延。包含时变时延的离散非线性系统可表示为


下面给出RMPC 优化问题的描述。为了解决时变时延所带来的控制问题,设计的鲁棒控制器需要满足以下要求:(1)保持式(9)系统的鲁棒稳定;(2)对性能指标进行优化。实际上,每次MPC 问题的控制目标是通过最小化性能指标计算得到,对于式(9)离散时滞系统的模型预测控制问题,可以描述为min-max优化问题:
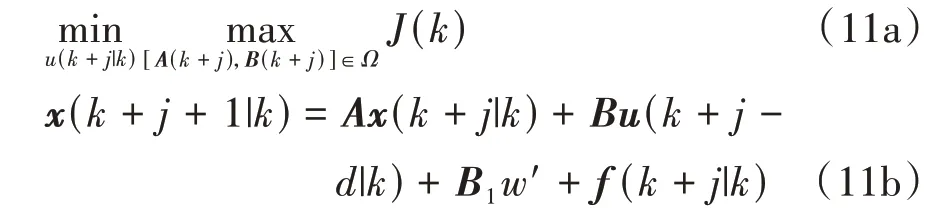
式(11b)表示系统的状态预测模型,(++ 1|)表示时刻对1 时刻状态的预测。考虑到交通流畅性、安全性和燃油经济性的综合优化,构造二次性能指标如下:
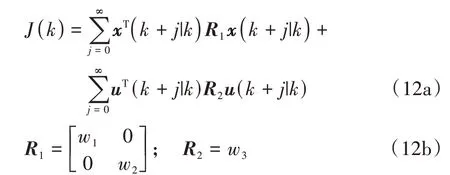
式中、分别为状态变量与控制量的加权矩阵。权值系数表达式如下:
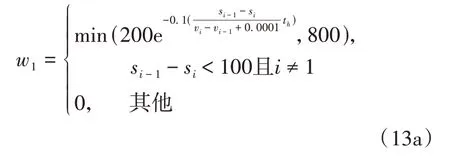

式中:、、分别为距离误差、速度误差、加速度误差的加权系数;表示目标车速的范围。可以根据前后两辆车之间的距离、速度差实时调整,保障车辆安全性。当目标车速范围很小时,、可以取适当的常数。
2 鲁棒模型预测控制
为了使得闭环系统渐进稳定,须设计状态反馈控制律:

为转化为便于Matlab 求解的优化问题,将minmax 优化问题转化为带有LMI 约束的优化问题,引入一个二次函数:

其中:
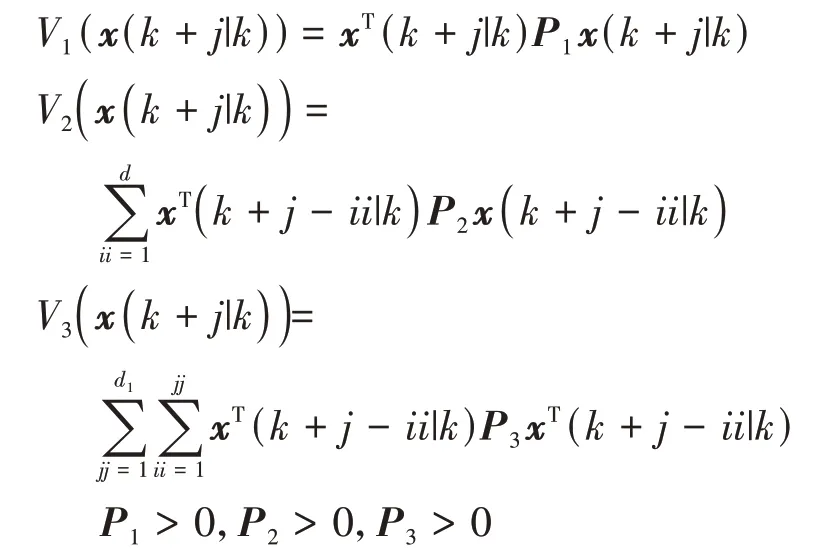
假设在时刻,有
令(∞|) = 0,所以有(∞|) = 0,将式(16)不等式两边从0到∞求和,可以得到

即可得到()的上界。
这就将原来式(11)的min-max 优化问题转化为最小化性能指标上界的优化问题:

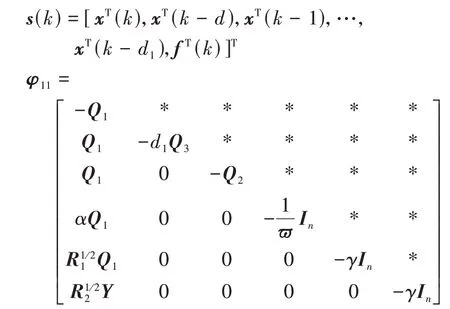
如果在时刻,存在6个正定矩阵、、、、、和标量>0、>0,满足以下LMI优化问题:
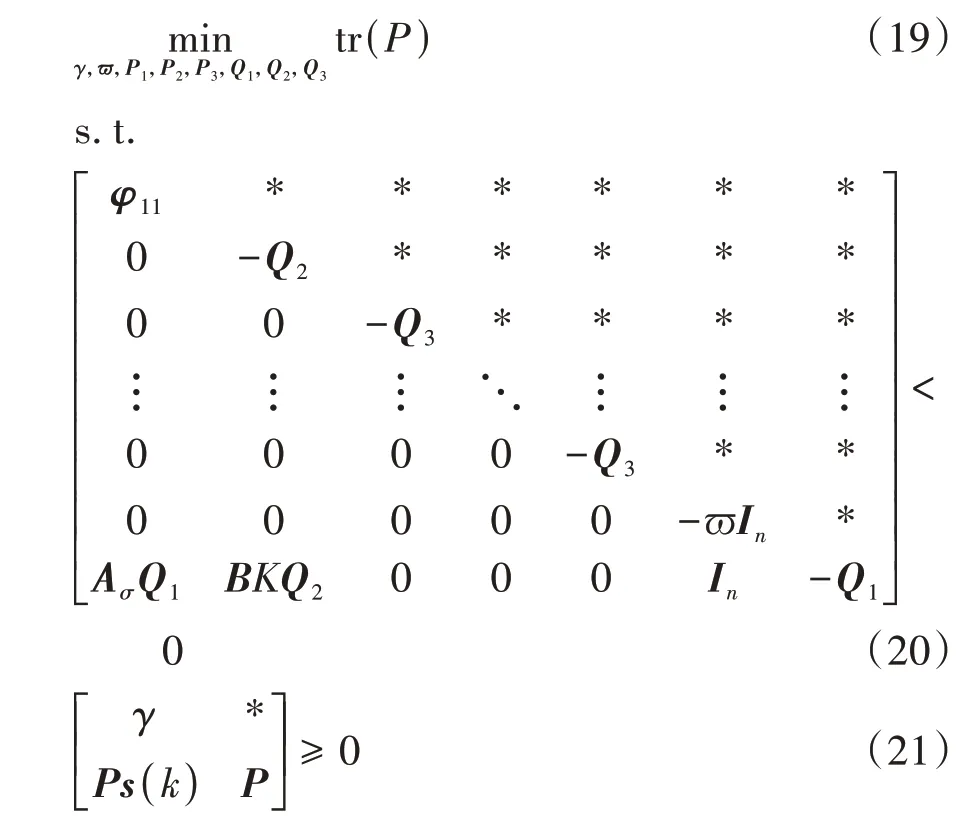
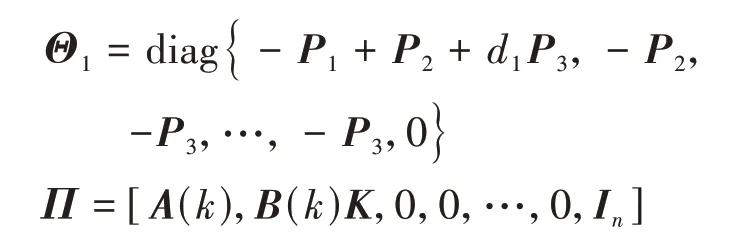
其中:= diag{,,,…,,I}
则增益矩阵=,鲁棒模型预测控制律(+|) =(+|),能使鲁棒性能指标上界最小化。
本文中设计的鲁棒模型预测控制算法如下:
(1)输入模型参数和定义初始状态,包括初始位置和速度;
(2)在时刻,利用Matlab 中的LMI 工具箱求解式(19)~式(21)优化问题,得到增益矩阵;
(3)将时刻的控制律作用于式(9)被控系统,得到下一时刻的状态;
(4)如果< k,重复(2)和(3),否则算法终止。
稳定性证明如下。
在证明之前,首先给出引理1:设() 和()都是关于∈R的二次函数,如果对于任意的∈R-{0},有() < 0,并且存在常数> 0使得() -() < 0,≠0 成立,则有() <0。
对李雅普诺夫函数(15)求差分,有


其中:=+
接下来令:

其中:=+
因为()是Lipschitz非线性函数,满足式(10),又可以写成(+|) =()(),其中=diag{-I,0,…,0,I}。
根据引理1,存在数值> 0 使得() -() < 0成立,则有() < 0,即

令=,=,=,ϖ =,根据Schur补引理,式(24)等价于
其中:= -+++(+) +ϖI
并将式(25)分别左乘和右乘矩阵diag{,,,…,,I,I},根 据=和Schur补引理,可得到式(20)成立。
因 为() < 0,且(+|)(+|) +(+|)(+|) > 0,可以得出Δ< 0,根据李雅普诺夫稳定性理论,可得闭环系统渐进稳定。
3 仿真试验与分析
在这一节中,将验证提出的模型与控制策略的可行性与有效性。考虑到时变时延,为每辆车都设计一个鲁棒模型预测控制器,使车队实现交通流畅性、燃油经济性的提高,同时保证车辆安全性。
本次试验考虑单车道情况,每间隔500 m 设置一个交通信号灯,道路上有6 辆网联车组成车队。交通信号灯信息、每辆车的初始位置与速度均随机选取。为模拟城市环境中的拥堵情况,交通信号选择红灯时间比绿灯时间长的情况,红灯平均时间为40 s,绿灯平均时间为15 s,具体时间以(40,15)为间隔随机选取。城市环境下的最大车速为20 m/s,最大加速度为1.5 m/s。车辆具体参数及其他仿真参数见表1。
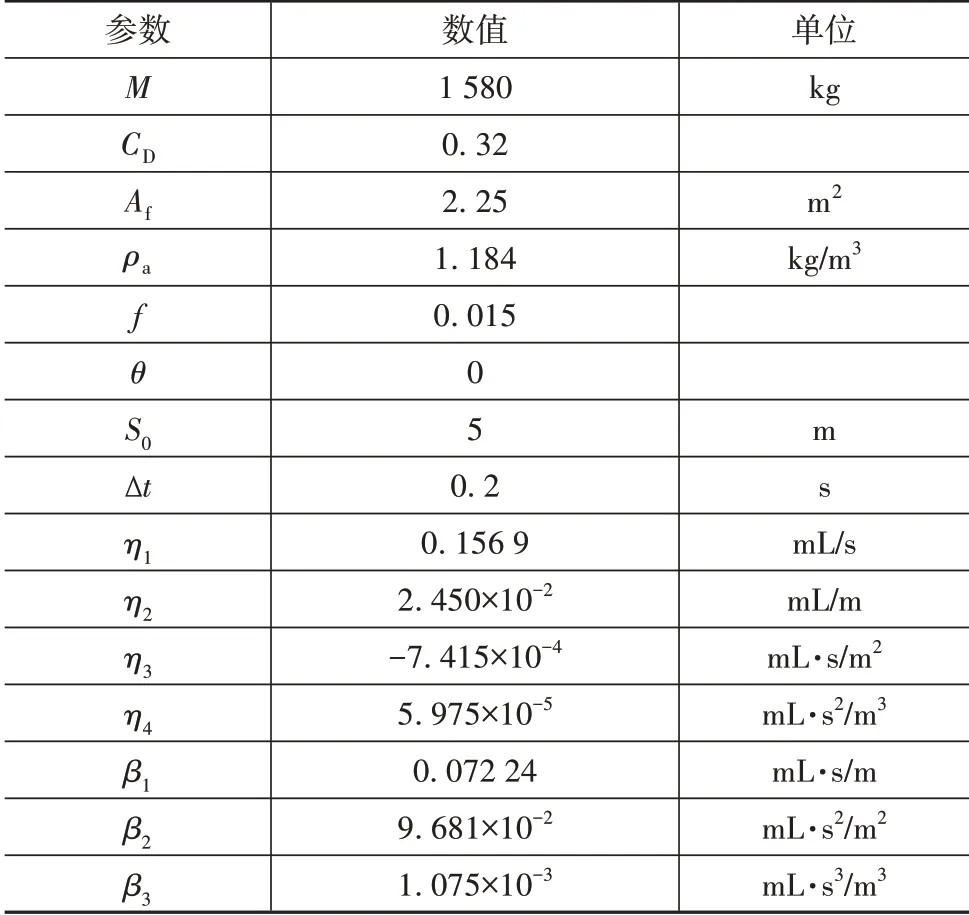
表1 仿真基本参数
分别采用3 种控制方法进行仿真,一为本文提出的鲁棒模型预测控制(RMPC)方法,同时设立联网巡航控制(CCC)方法和快速模型预测控制(FMPC)方法两种对比方法。 3 种方法均以式(7)作为目标车速,时延在0、0.2 和0.4 s 之间随机选择,概率分别为0.25、0.5和0.25。
采用本文提出的RMPC 方法车辆的基本性能如图2 所示。图2(a)的队列轨迹图显示,车队所有车辆均在绿灯时间内通过路口,没有因红灯而停车。同时可以看到,车辆轨迹之间没有交叉,即车辆之间未发生碰撞,安全性得到了保证。图2(b)为车速曲线图,可以看出6 辆车的车速曲线十分接近且平滑,表明本文所提出的控制方法可以保证车辆之间稳定的协同控制。同时,整个过程中车辆并没有进行频繁的加减速,且车速始终大于0,这表明提出的方法能减少车辆的加减速次数,且车辆在行驶过程中一直没有因为交通信号灯而停车。
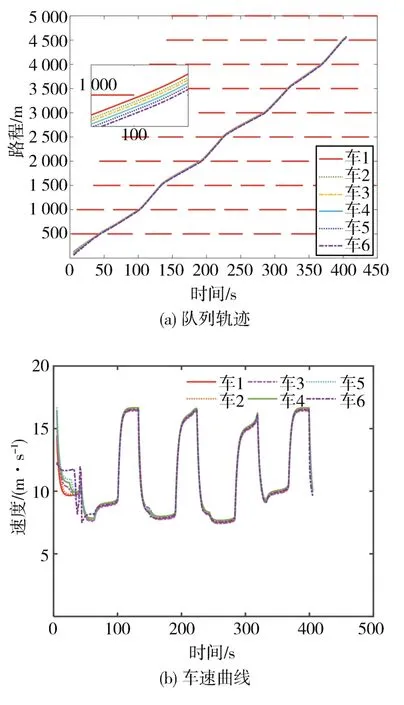
图2 RMPC方法下的基本性能
图3为分别采用两种对比方法后的队列轨迹图。可以看出,当采用CCC 方法时前5 辆车可以不停车地通过所有路口,但第6 辆车在过第一个路口时因为遇见红灯而被迫停车。而当采用FMPC 方法时,队列轨迹与采用RMPC 方法时十分接近,均可以不停车地通过所有路口,且车辆轨迹之间没有交叉,保证了队列的安全性。可以得出,本文提出的RMPC 方法相比于CCC 方法,避免了红灯停车,提高了交通流畅性。
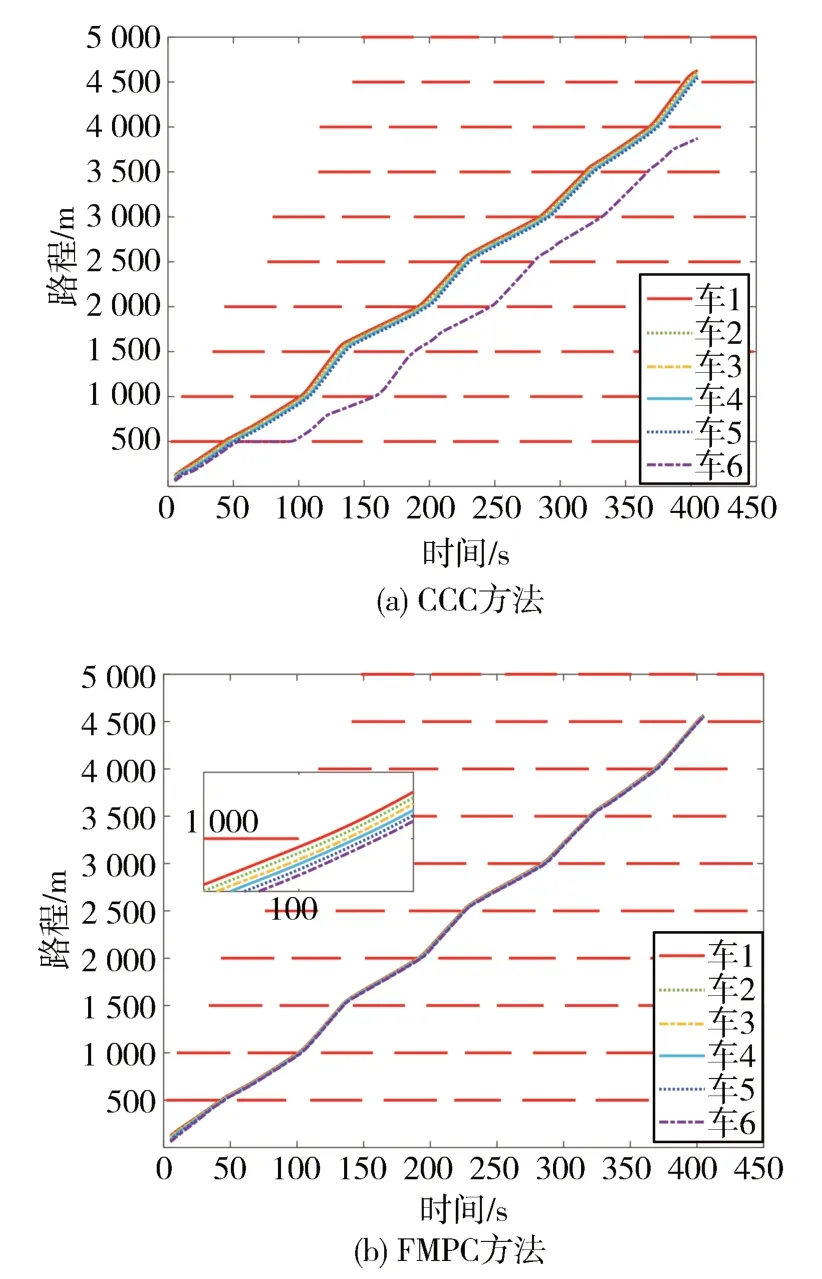
图3 对比方法下的队列轨迹
为了进一步比较时延情况下RMPC 方法和FMPC 方法的控制效果,对两者的跟踪误差和燃油经济性进行了评价。同时,为了对比在不同时延状态下的控制性能,设置3 组不同的时延分布:d00、d11和d22,分别以不同的概率在0、0.2和0.4 s的时延中随机选择,概率取值如表2 所示。可以看出,从d00到d22,大时延出现的概率逐渐增加。
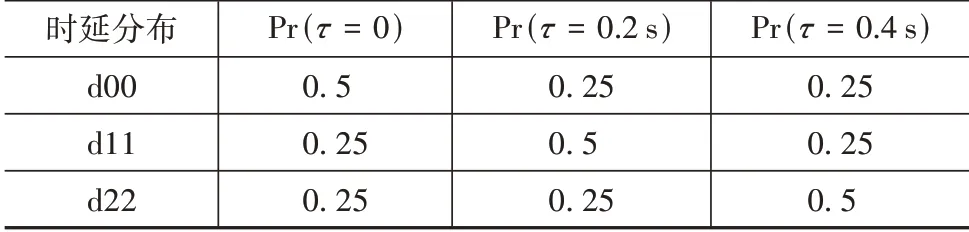
表2 时延概率设置
采用RMPC 方法和FMPC 方法在不同时延状态下的跟踪误差如图4 所示,包括速度误差均值和距离误差均值。可以看出,随着大时延出现概率的增加,两种控制方法下速度误差和距离误差的整体趋势基本一致。在不同时延分布下,采用RMPC 方法时的两种误差均小于FMPC,控制性能较好。同时随着大时延出现的比例增加,RMPC 方法的误差并没有发生明显变化;而采用FMPC 方法时,当大时延出现的概率加大时,误差也随之增大,性能劣化明显。

图4 不同时延下的跟踪误差统计
图5 为不同时延状态下采用RMPC 方法和FMPC 方法的燃油经济性对比图,英里每加仑(miles per gallon,mpg)越高代表燃油经济性越好。由图可知,与FMPC 方法相比,采用RMPC 方法时,不论是单辆车还是车队整体的燃油经济性均更好。同时,与跟踪误差类似,随着大时延概率的增加,对比方法的mpg 逐渐减小,而RMPC 方法下仍能保持着较优的燃油经济性。这意味着所提出的方法有着更优更稳定的燃油经济性能。可以认为,RMPC 方法的控制性能优于FMPC 方法,同时随着时延的变化,控制性能波动也远小于对比方法。
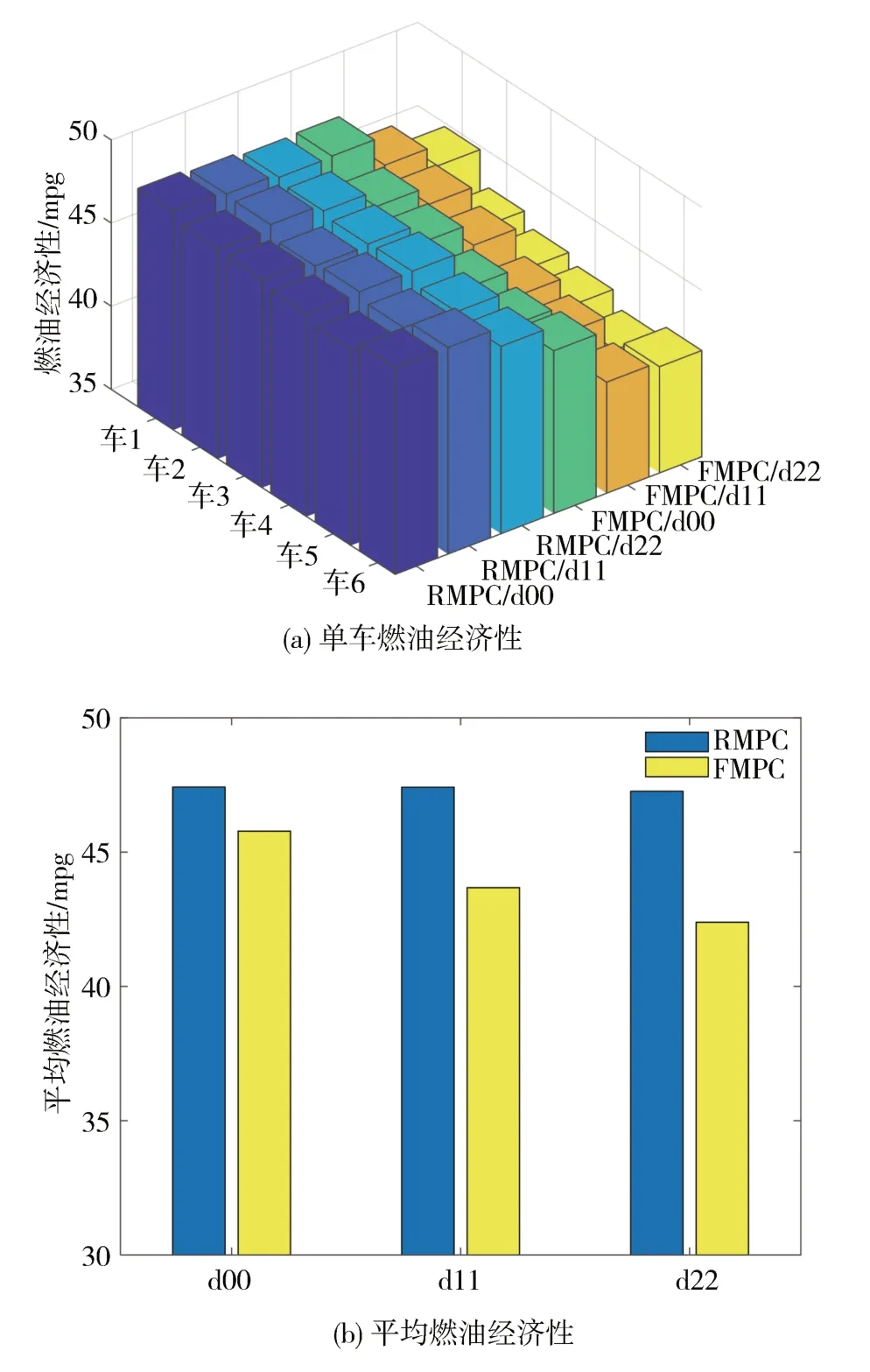
图5 不同时延下的燃油经济性统计
4 智能小车试验与分析
试验使用智能小车算法验证平台,包括3 辆纯电动智能小车、信号灯、信号灯控制器、路由器、总控制平台、UWB 定位模块、电压电流测量模块和环形跑道等。智能小车由感知模块、小车计算模块、小车主体和小车控制模块组成。小车计算模块为Intel主板,在接受信号灯状态和前车状态后,运行待验证算法。小车控制模块为STM32 单片机,接受来自小车计算模块的控制信号,实时控制小车的速度和转角,并实时采集小车的速度和转角发送给小车计算模块。试验场景如图6所示,试验参数见表3。
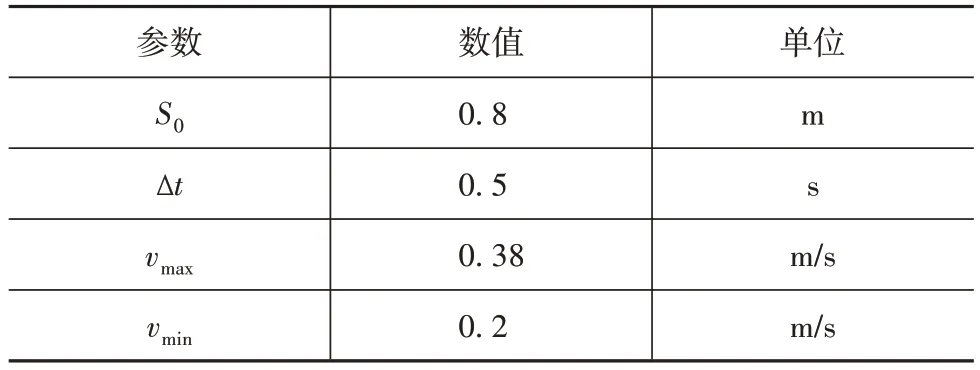
表3 小车试验参数

图6 智能小车试验场景
由于硬件特性和驱动能力,小车的控制步长设为0.5 s,时延则设为一个步长,信号灯距离为9.5 m,共10个路口。同样的,采用3种控制方法进行试验。队列轨迹如图7 所示。采用CCC 控制方法时,车3在过第3个路口时遇见红灯而停车,而采用FMPC方法和RMPC 方法时均能全部在绿灯时间通过路口,提高了交通流畅性。另外,可以看出3 条轨迹之间没有交集,且始终保持着一定的距离,而且与FMPC方法相比,采用RMPC 方法时车队间距更加稳定,意味着在没有发生碰撞的同时,RMPC 方法可以更稳定地维持以预设的安全距离行驶。
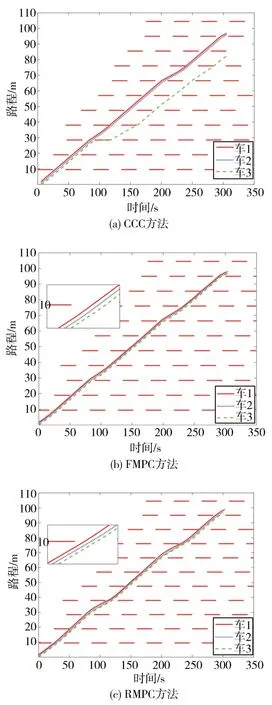
图7 小车试验队列轨迹
表4 为RMPC 和FMPC 两种控制方法下的跟踪性能和耗电量对比。由表4可知,RMPC方法下每辆车的速度误差和距离误差均低于FMPC,同时耗电量也更小,证明本文提出方法的控制性能优于FMPC,能源经济性更好,与仿真结果吻合。
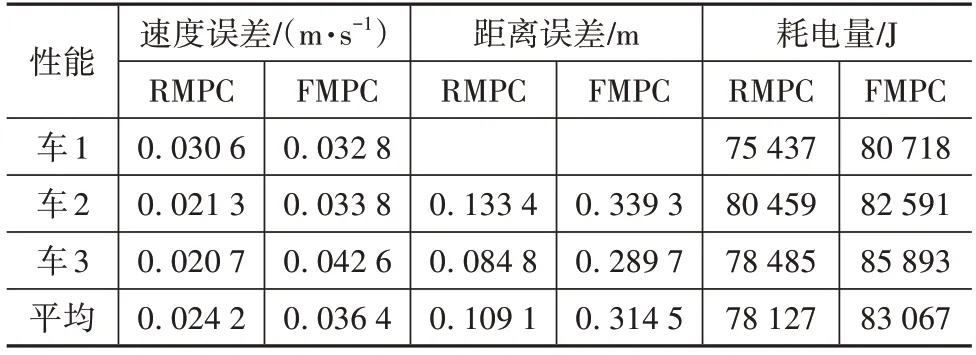
表4 控制性能对比
5 结论
本文中针对生态驾驶中的时变时延带来的控制性能问题,提出了一种鲁棒模型预测控制方法。建立了车队的时滞离散模型,对安全性、燃油经济性和交通流畅性进行优化。采用状态反馈控制结构,利用LMI 技术和min-max 模型预测方法,计算状态反馈增益矩阵,设计鲁棒模型预测控制器。智能小车试验结果与仿真结果吻合,表明本文提出的控制方法可以在不同时延状态下,保证系统的鲁棒稳定,提高交通流畅性,且平均燃油经济性提高3.6%以上。在下一步的研究中,将进一步考虑乘坐人员的舒适性,包括纵向舒适性和垂向舒适性,并对综合舒适性和燃油经济性两个优化目标进行解耦。
猜你喜欢
房地产导刊(2022年4期)2022-04-19 09:04:10
汽车工程师(2021年12期)2022-01-17 02:29:58
小学科学(学生版)(2019年3期)2019-03-30 01:39:28
小天使·一年级语数英综合(2018年6期)2018-06-22 10:25:54
汽车维护与修理(2018年1期)2018-04-04 01:13:22
华人时刊(2016年19期)2016-04-05 07:56:05
四川电力技术(2015年5期)2015-12-19 11:04:54
减速顶与调速技术(2015年4期)2015-03-16 03:39:41
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
