
混合交通下非信控交叉口队列预约式控制*
2022-08-04 07:19陈一鹤孔伟伟李克强罗禹贡
汽车工程 2022年7期
陈一鹤,孔伟伟,2,于 杰,2,李克强,罗禹贡
(1. 清华大学车辆与运载学院,汽车安全与节能国家重点实验室,北京 100084;2. 中国农业大学工学院,北京 100083)
前言
城市交叉口是交通系统的重要组成部分。在交叉口极易产生安全事故、交通拥堵和能耗增大等问题。近年来,随着智能网联汽车(intelligent and connected vehicles,ICV)技术的发展,ICV 的协同控制可有效解决上述问题。得益于ICV 的通信能力,路口的信号灯可以被集中式控制器取代,成为非信控路口。面向非信控路口的ICV 协同控制研究已受到本领域国内外学者的广泛关注,并取得了较多研究成果。但现有研究通常设定所有车辆均为ICV,较少考虑人类驾驶车辆(human-driven vehicles,HDV)的影响。根据ICV 的发展趋势,ICV 与HDV并存的混合交通模式会长期存在。因此,针对HDV和ICV并存的情况研究非信控交叉路口混合交通协同控制方法,尤其是探讨不同ICV 渗透率对系统的影响,具有重要的理论价值和现实意义。
针对非信控交叉口的车辆协同控制问题,Dresner 和Stone 等提出了一种预约式管理策略。ICV 向集中式控制器发出交叉口预约申请,根据已预约情况判定是否具有通行权,若有则预约成功;反之,车辆须减速等待直至预约成功。该方法能有效解决交叉口控制问题,但要求所有车辆均具有通信能力。Lee等以车辆在交叉口中所有位移-时间曲线的重叠长度最小为目标函数,对各车辆的速度进行优化求解,从而确保ICV 车辆无冲突地通过交叉口。梁晶伟和柴琳果基于间隙理论的通行时刻分配为每一辆即将到达的ICV 计算出可行的通过路口时刻。该控制方法能较好地解决不同行驶方向车辆之间的路权冲突问题,但并未探讨HDV 对整个系统的影响。Lin等在间隙理论的基础上,提出了一种调度HDV 的思路。该研究为确保安全性,根据路口情况用指示灯引导HDV 通行,且在HDV 通过交叉口时禁止ICV 通行,给予HDV 更长的安全距离,但这种方式对交通效率影响较大。Naumann 等根据车辆距交叉口的距离、速度和怠速时间加权计算各车辆的优先级,而分配通行权。这也要求系统中的各车辆均为ICV,从而遵循实时计算分配的优先级通过交叉口。
综上所述,目前非信控交叉口协同控制的相关研究,对于混合交通条件下HDV 的调度及其对系统影响的探讨尚不深入。本文中针对混合交通条件下的非信控交叉口,制定ICV 和HDV 协同控制策略,在实现安全通行的基础上,提升交叉路口通行效率并降低车辆能耗,系统地探讨不同渗透率下对交通和车辆性能的影响。
1 队列预约式分层控制架构
研究场景如图1 所示。十字交叉口中设有一个集中式控制器,被称为“交叉口自主管理器”(autonomous intersection manager,AIM),负责调度其管理范围内的所有ICV。此交叉口的每条车道按与交叉口中心的距离分成观察区、控制区、冲突区和自由行驶区4 个部分。其中,观察区、控制区和冲突区统称为交叉口管理区域。
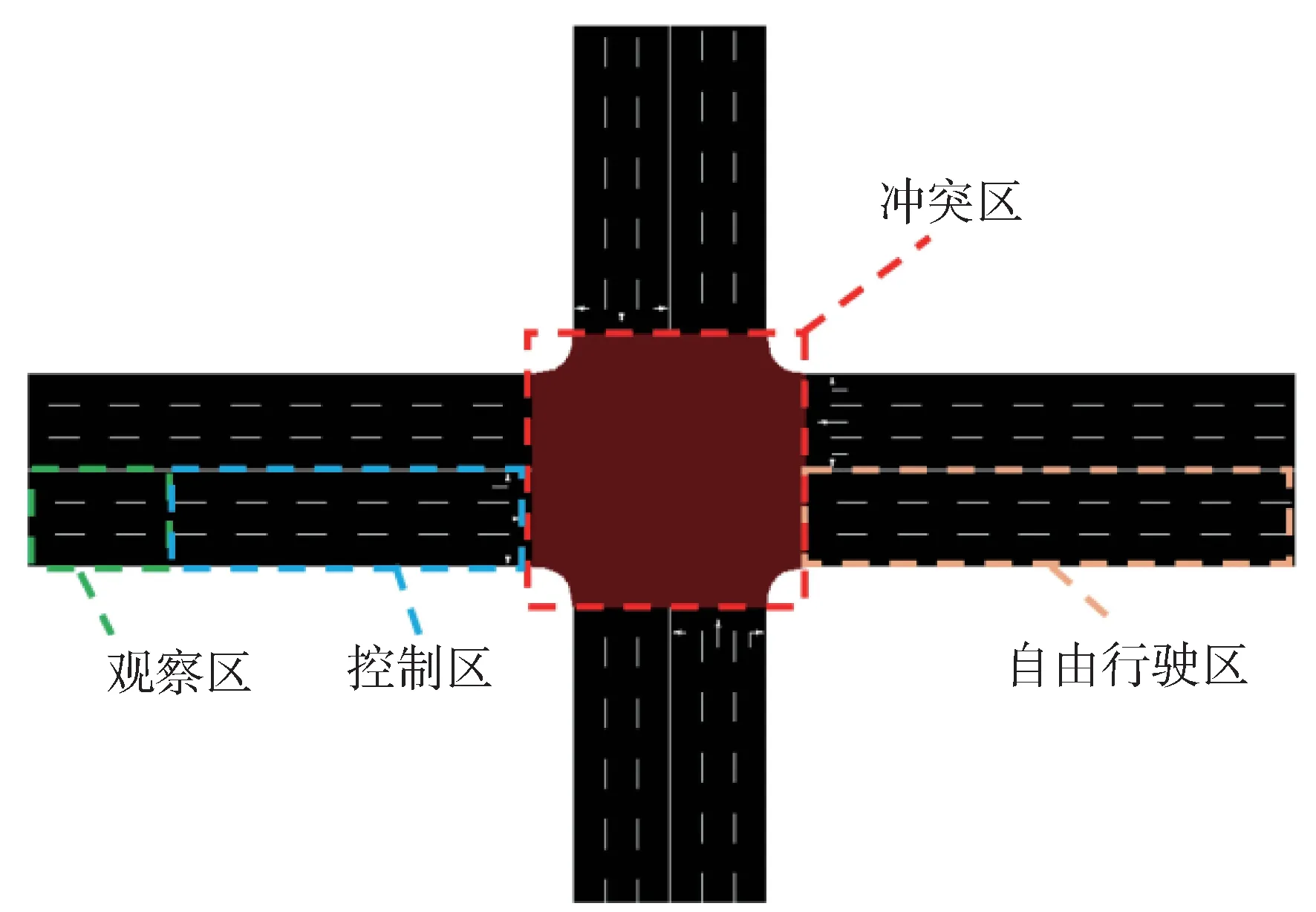
图1 研究场景
本文中提出一种适用于混合交通条件的队列预约式分层控制架构,如图2 所示。该控制架构分为两层,上层进行各车辆通行时刻的分配,下层进行各车辆的速度轨迹控制。
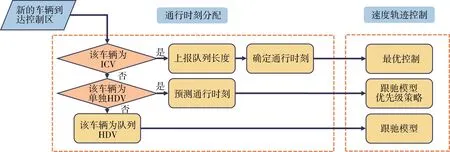
图2 队列预约式分层控制架构
当有新的ICV 到达控制区入口时,AIM 会根据上报的队列长度信息和目前控制区内已经确定了通行时刻的车辆(队列)情况,计算一个无冲突的通行时刻并分配给该车辆或队列头车。
对于不在队列中的HDV,由于无法对其进行控制,只能预测它的通行时刻,以便为后方到来的ICV分配通行时刻。
图1 中十字路口冲突区域的局部放大图和各车道连接关系如图3 所示。右转车道因无冲突无须考虑。对其中直行和左转车道进行编号,从由南向北行驶的直行车道开始,顺时针编号为~。
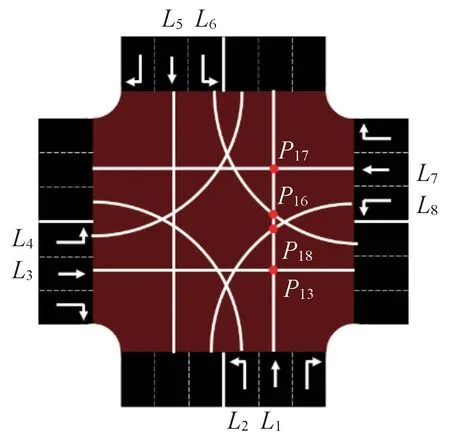
图3 冲突区局部放大图
根据这些车道的行驶轨迹之间是否存在冲突点,可定义冲突矩阵。其元素c为1表示车道L与L的行驶轨迹之间存在冲突;c为0表示车道L与L的行驶轨迹之间没有冲突。则得到冲突矩阵为
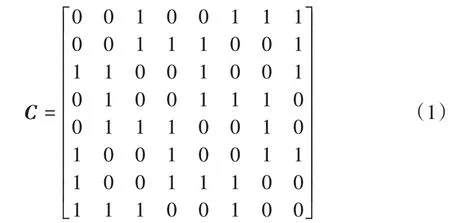
由图3 和式(1)可见,每条车道的行驶轨迹都各有4个冲突点。
2 基于队列预约的ICV控制策略
如图3 所示,非信控交叉口冲突区内存在各方向路径的交叉冲突点,因此非信控交叉口控制的核心问题之一就是提前对车辆通过冲突区的时间进行协调,以避免产生空间上的冲突,即任一时刻的空间中任一点不可能同时被两辆车占用。为此,本文基于文献[11]的间隙分配思想,提出基于预约式控制的ICV控制策略,如图4所示。
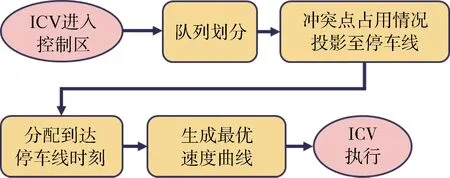
图4 ICV控制策略
(1)队列划分
队列划分是指将ICV 与其后跟随的HDV 编组,统一通过交叉口冲突区。
(2)冲突点占用情况投影
以P表示车道L与L的行驶轨迹的冲突点,以t表示目前已知的该冲突点被车队占用的最后时刻,即目前管理区域内所有即将经过该点的车辆中,最后一辆车预计离开该点的时刻。
以车道为例,表示出其行驶路径上的4 个冲突点、、、(见图3)。
为统一反映通过这些冲突点的车辆对于车道L的影响情况,可以将对应的最后占用时刻以车速为其斜率的角度“斜向投影”至车道L的停车线,即将它们按照各冲突点到车道L停车线的距离在时间轴上向前平移,得到L停车线处对应的占用时刻为

式中:t为冲突点P对应的在L停车线处的占用时刻,即为避免与车道L上的车辆冲突,车道L上车辆在停车线处禁行时段的最后时刻;t为冲突点P的最后占用时刻;d为冲突点P与停车线之间的距离;为规定的通过路口的速度。
图5以车道为例,绘制了路径上的4个冲突点对应的时间占用情况,以及它们向车道停车线投影的示意。其中横轴代表时间,纵轴代表相对距离。
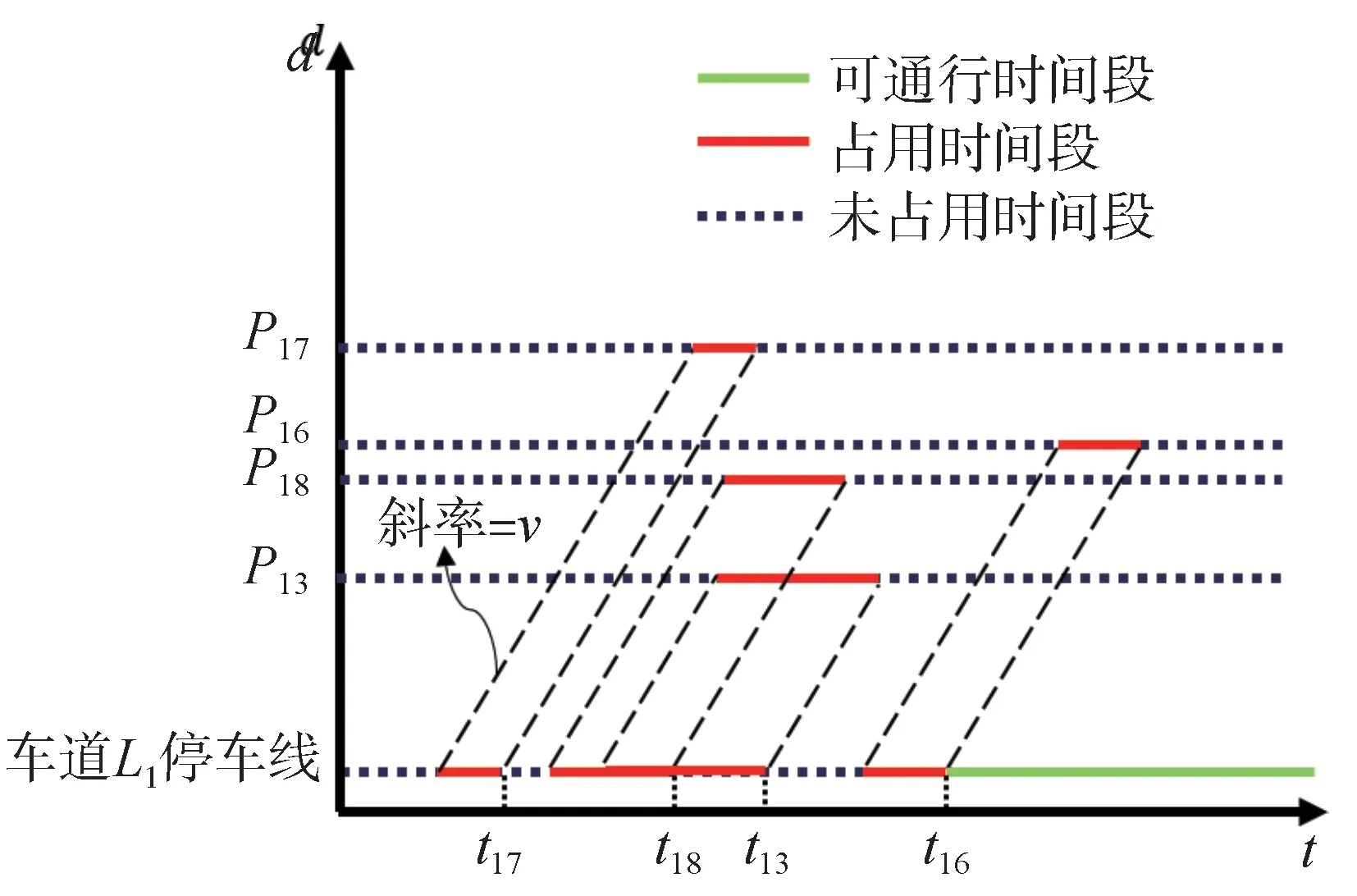
图5 停车线时间占用情况
(3)通行时刻分配
在得到停车线占用时刻的基础上,车道L上的车辆若要无冲突地通过交叉口,到达停车线的时刻不应早于t:

此外,考虑到车辆的动力学限制和道路限速的限制,车辆理论上可能到达停车线的时刻存在一个最小值。综合考虑安全时距、交通效率和相关限制,对于刚到达控制区的L车道上的ICV,可分配其到达停车线的时刻为

式中表示车辆之间的安全时距。
若该ICV 所在队列车辆数为,且速度为时队列内部时距为∆,则最后一辆车到达停车线时刻为+(- 1)∆。据此,可以更新各冲突点的最后占用时刻为

经过更新,AIM 就会为此车辆(队列)预留出这个时间段,以确保后续到达的车辆(队列)不会与它发生碰撞。
(4)生成最优速度曲线
为使ICV能在时刻到达停车线,须为它规划未来一段时间的速度曲线。为尽量降低车辆行驶的能耗,取目标函数为

式中:()为控制输入,控制区间为[,],其中为该车进入控制区的时刻,为根据式(4)计算出的到达停车线的时刻。
简便起见,设ICV 的纵向控制服从如下线性模型:

其中()为状态量,且
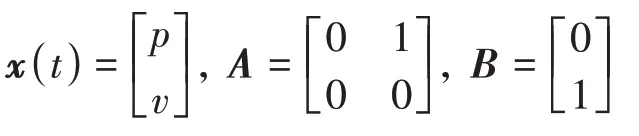
、分别表示该车的位置(进入控制区的距离)和速度,满足:

式中:为该车进入控制区时的速度;为控制区长度;为规定的车辆通过交叉口冲突区的速度。
为考虑实际情况的限制,还须满足如下约束:

求解此最优控制问题便可得到ICV 的最优控制律u()。值得注意的是,上述条件并未考虑同一车道上车辆的安全距离约束。因此,若在某一时刻,所给出的控制序列不能满足安全距离约束,则该ICV由最优控制切换为跟车模型控制。
3 基于队列控制的HDV调度策略
制定基于队列控制的HDV 调度策略,如图6 所示。在行驶时,HDV 跟随前方车辆形成队列,并由一辆ICV 作为队列头车引导,称为1+队列。该队列的稳定性与可控性已由Chen 等给出了证明。若没有ICV 作为头车引导,则该HDV 会作为自由HDV。
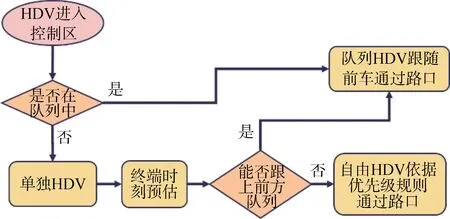
图6 HDV调度策略
同一车道上,一辆ICV 和其后所有的(在后一辆ICV 之前的)HDV 分为一个队列,该队列会在该ICV的引导下连续通过交叉口冲突区域而不被打断。将这些队列作为管理对象,其主要目的是充分利用ICV的可控性,发挥它们的引导作用,以提高安全性。
(2)自由HDV
在渗透率较低或车流量较小的情况下,按照上述队列划分方法,可能出现不处于任何队列中的自由HDV。对于这些HDV,首先需要在它进入控制区时预估其行驶状态。
记N()为车道L上在时刻控制区内的车辆数。这些车辆按进入控制区的先后分别编号为1、2、…、N()。若在时刻,有自由HDV出现在车道L的控制区入口,由于并不能与HDV 通信,因此会以当前的速度()预估它到达停车线的时刻为



则认为该HDV 会在到达停车线之前进入跟车状态,其中∆为队列内部时距。此时将它与编号为N()车辆编为同一队列,此HDV 也成为了队列HDV,按下式更新它到达停车线的时刻:


我回来,对别呦呦说,我见着边兀了,我从没见他笑过。别呦呦说,他没笑过,那是他想老婆孩子了吧?他来这八年,已有八年没见着老婆孩子了。我愤愤地说,什么老婆孩子?这种人,就该断子绝孙!
对于自由HDV 在路口的通行策略,在综合考虑交通规则和通行效率的基础上,采取如下规则。
(1)若与其他方向的车辆无路权冲突,则按原速度匀速通过。
(2)若与其他方向的车辆有路权冲突,则遵循如下优先级规则:主干路直行>主干路左转>非主干路直行>非主干路左转。具有较高优先级的车辆可按原速度匀速通过,具有较低优先级的车辆则需要减速等待获得路权。
4 仿真验证与分析
为验证所提出的控制架构和策略的有效性,基于python和SUMO搭建了仿真平台,并针对不同ICV渗透率和车流量进行仿真对比验证。
4.1 仿真设计
采用一种已经广泛应用的感应式信号控制方案(actuated traffic light control,ATLC)作为对比,其原理如图7所示。
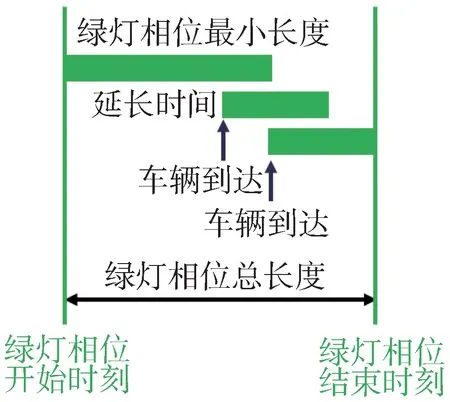
图7 感应式信号控制方案
绿灯相位设有最小长度。绿灯相位开始后,若在最小相位长度结束前有车辆到达,则延长一段绿灯相位时间。为防止某条路上的持续来车一直占用路权,也会设置一个最大绿灯相位长度。
在此方法中,各车辆均采用驾驶员模型控制,它们只会根据当前的信号状态做出反应,即此方法中不区分ICV 与HDV,因此在不同渗透率条件下此方法的效果均相同。
系统主要参数设置如表1 所示。仿真中设置南北向道路为主干道。
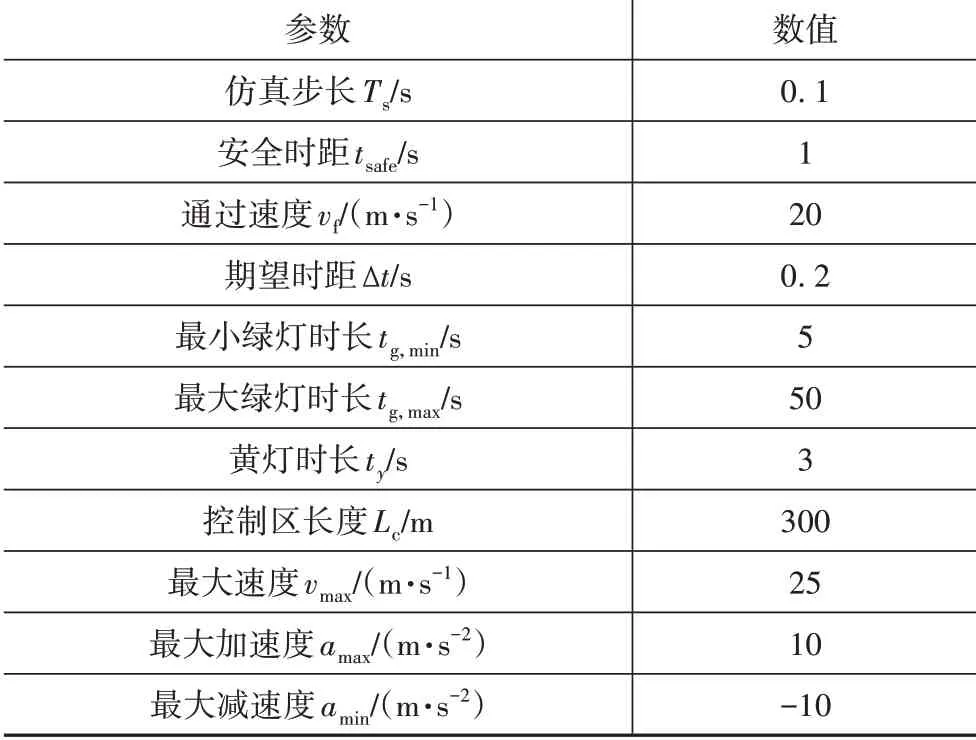
表1 仿真参数设置
4.2 仿真结果与分析
仿真时智能网联汽车渗透率设为0~100%,各车道车流量设为400~1 000 h。
4.2.1 通行效率对比分析
选取车辆通行的平均延误作为通行效率的评价指标。延误指的是车辆实际通过路口所用时间与理论上通过路口所需最短时间的差值。各车辆的平均延误仿真结果如图8所示。其中左侧横坐标为每车道的车流量,右侧横坐标为ICV的渗透率。
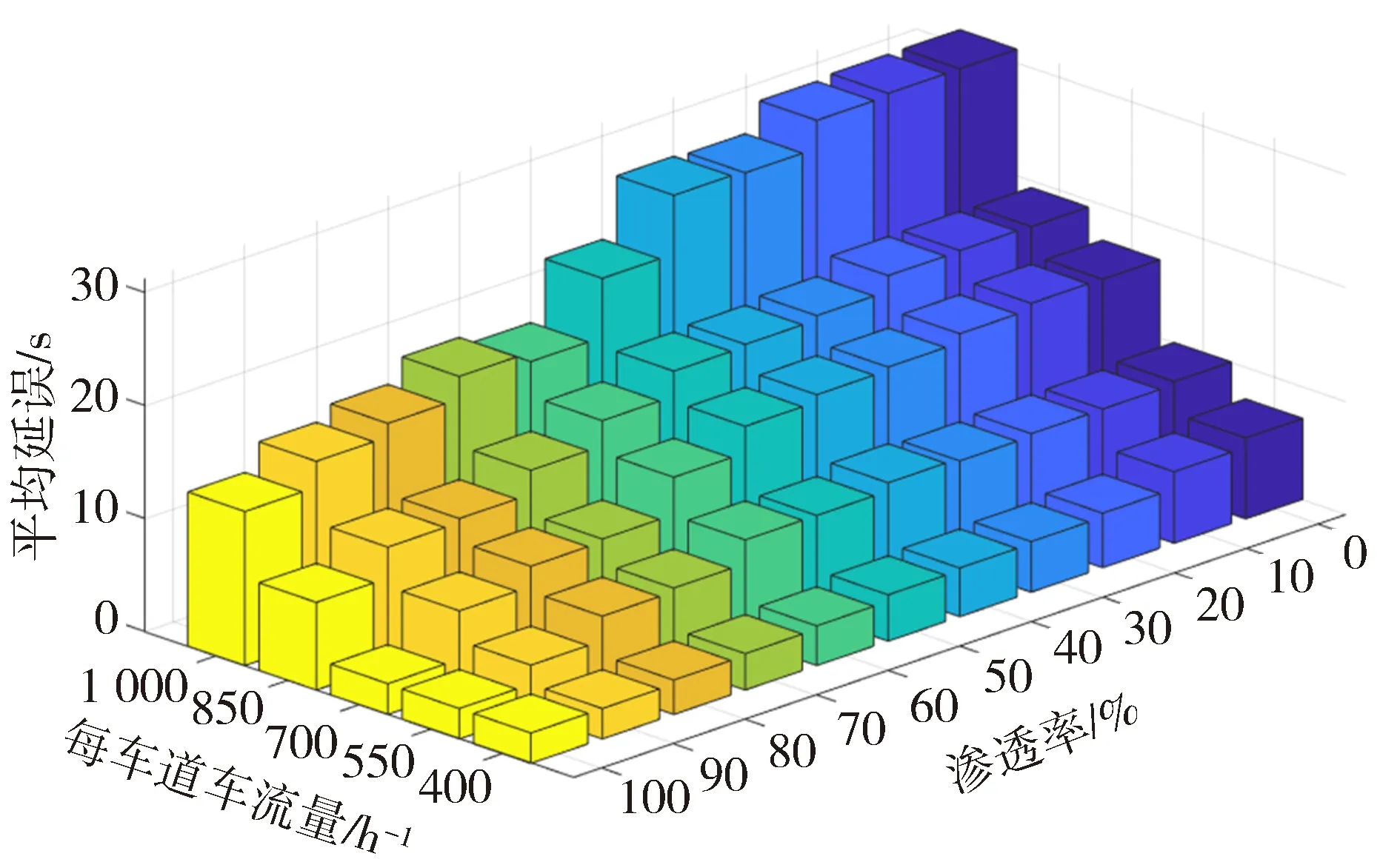
图8 不同渗透率和车流量下平均延误
采用本文所提出的队列预约式控制方法,车辆平均延误的总体趋势是随着渗透率的升高、车流量的降低而减小。另外,可以看出在较高渗透率下(90%以上),车流量为400~700 h时,控制效果接近,这是由于在这些情况下,可控对象ICV 比例较大,且车流量不高,交叉口几乎未出现拥堵,即未出现车辆停止在交叉口前等待通行的情况,控制指标也接近极限情况,即采用本文的策略时,此路口不产生拥堵的最大车流约为每车道700 h。
对应的仿真数据如表2所示。

表2 平均延误对比
由表2 可知,当ICV 渗透率较小且车流量较大时,感应式信号灯控制能有效提高通行效率,这是因为此时系统中的ICV 较少而HDV 较多,在无信号灯控制的情况下无法对HDV 进行有效的引导,路口极易产生拥堵,此时对ICV 的控制无法起到明显效果。因此,现有的城市交通系统中,在车流量较大的区域均会采用信号灯控制,仅在一些车流稀少的区域采用非信控的方式。
但是,随着ICV 渗透率的提高,采用本文的策略后,通行效率可得到显著提升。其中,与ATLC相比,在每车道400~1 000 h的车流量和50% ICV渗透率下,平均延误可降低6%~80%,且车流量越小,降低比例越大;而在100%渗透率下,平均延误可以降低45%~87%,此时几乎不会产生任何拥堵,各车辆均会顺畅地通过冲突区域而不必停车等待。
4.2.2 车辆油耗对比分析
各车辆通过管理区域的平均油耗仿真结果如图9所示,而对应的仿真数据如表3所示。
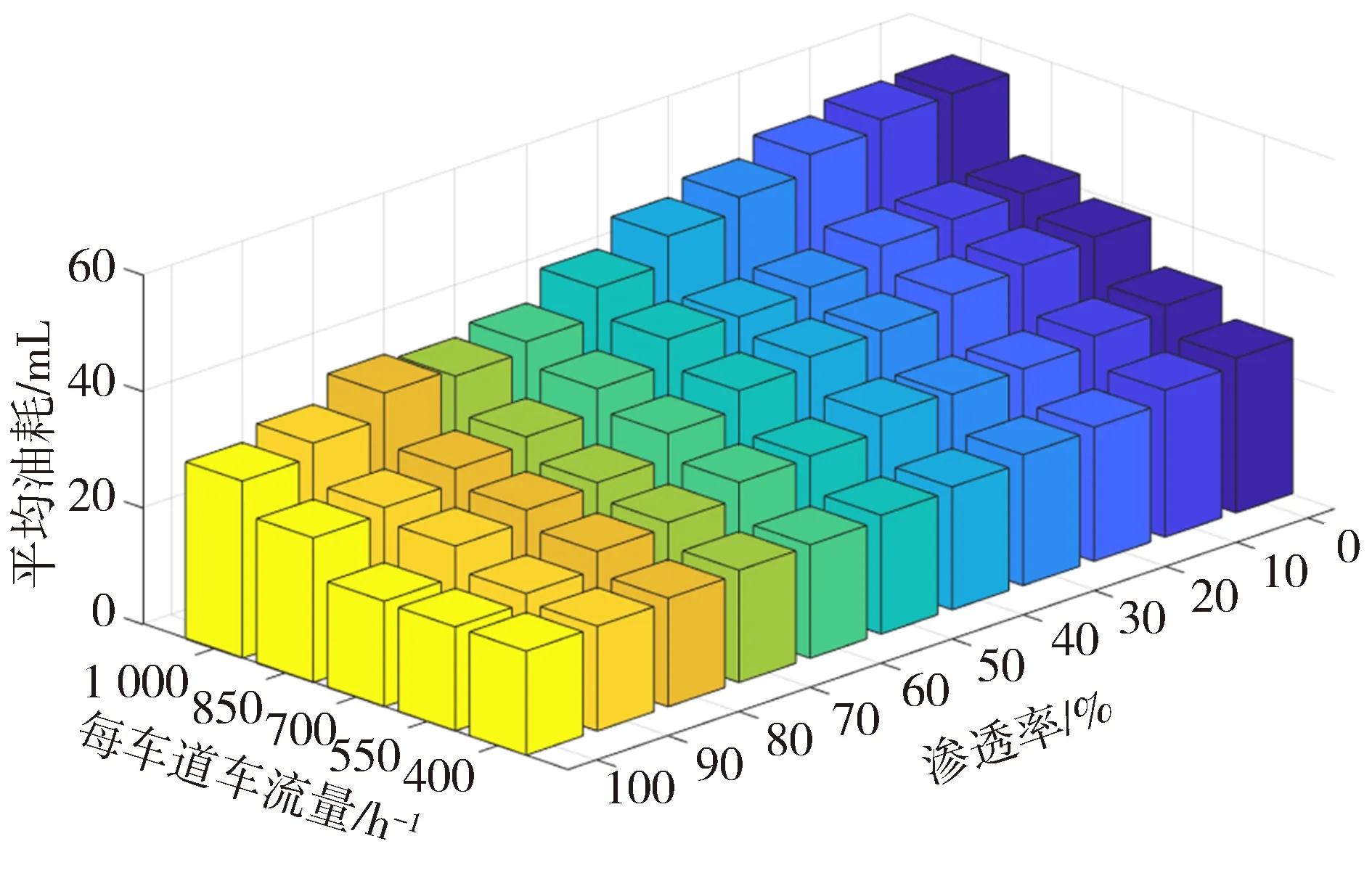
图9 不同渗透率和车流量下平均油耗
由图9和表3可见,车辆平均油耗的总体趋势是随着渗透率的升高、车流量的降低而降低;且车流量越大时,油耗随渗透率变化越明显。如车流量为400 h情况下,ICV 渗透率从0上升至100%时,平均油耗从26.59 降至17.89 mL,降低32.7%;而当车流量增大至1 000 h时,相对应的油耗从55.38 降至30.44 mL,降低45%。这是由于当车流量较小时,由于拥堵较少出现,车辆受影响较小,不会出现频繁起停的情况,此时油耗较小,渗透率的变化影响不大;而当车流量较大时,若不加以有效地控制,极易产生拥堵,从而造成车辆的频繁起停,导致油耗恶化,而渗透率的升高可控对象ICV 的数量增加,能对交叉口区域的车辆发挥有效的引导作用,从而更有效地降低平均油耗。

表3 平均油耗对比
至于控制策略的对比,与ATLC 相比,采用本文提出的策略,在50%渗透率下,车辆平均油耗约降低20%~55%;而在100%渗透率下,平均油耗降低43%~60%。信号控制策略会造成各车道车辆周期性地起停和等待,引起许多不必要的加速和怠速油耗,这也是目前信号控制路口存在的主要问题。采用本文策略后,车辆起停、等待次数显著减少,且行驶过程中采取ICV 控制量最小的策略,因此油耗得到有效控制。
5 结论
(1)针对混合交通条件下非信控交叉口的协同控制问题,提出队列预约式分层控制架构,以适应ICV 与HDV 混行的混合交通条件,且分为通行时刻决策和速度轨迹规划两层对车辆的行驶轨迹进行控制,能有效实现非信控交叉口的多车协同。仿真表明,在10%~100% 10 种不同ICV 渗透率和每车道400~1 000 h5种不同车流量情况下,各车辆均能顺利通过路口,且随着渗透率升高、车流量降低,交叉口通行效率显著提高,车辆油耗有效降低。
(2)基于上述架构,分别提出基于队列预约的ICV控制策略和基于队列控制的HDV调度策略。该策略能够适用于不同ICV 渗透率的混合交通条件,能有效提升路口的安全性和通行效率;同时ICV 的速度轨迹规划基于最优控制,可有效降低行驶油耗。仿真结果表明,本文方案与感应式信号控制方案对比,在每车道400~1 000 h车流量条件下,50%渗透率时平均延误降低6%~80%,平均油耗降低20%~55%;而在100%渗透率时,平均延误降低45%~87%,平均油耗降低43%~60%。
后续研究中,须用更准确的模型对HDV 进行预测;还应考虑HDV 的不确定性和通信性能的影响,提高系统的鲁棒性。
猜你喜欢
人民交通(2022年18期)2022-09-28
物流科技(2022年2期)2022-05-07
汽车实用技术(2022年7期)2022-04-20
汽车工程(2022年3期)2022-04-07
科学导报·学术(2020年26期)2020-10-21
科技创新与应用(2016年36期)2017-02-21
青年文学家(2016年32期)2016-12-23
数学教学通讯·初中版(2015年5期)2015-06-17
意林(2009年12期)2009-02-11
