背包式三维激光扫描仪在村庄地籍调查工作底图测量中的应用
2022-08-02 07:01蔡东健周旺辉邢万里沈姜威崔宸洋高笔清
地理空间信息 2022年7期
岳 顺,蔡东健,周旺辉,邢万里,沈姜威,崔宸洋,高笔清
(1. 苏州工业园区测绘地理信息有限公司,江苏 苏州 215027)
随着城镇化进程的加快,村庄地籍调查工作底图测量正在紧锣密鼓的推进。村庄地籍调查工作底图测量工作具有复杂多变、时间紧、任务重等特点,传统的GPS、全站仪和测距仪的组合测量已不能满足日益增长的测量工作要求[1-4]。如何快速获取高质量的建筑物信息,已成为地籍测量项目的关键工作[5]。三维激光扫描技术可快速大面积获取扫描区域的三维点云数据和影像信息,正在逐步替代传统的作业手段[6]。目前常用的三维激光扫描设备载体包括机载、车载和地面式[7]3种。近年来,背包式三维激光扫描仪开始走向市场,并逐渐应用到测绘相关业务中[8-10]。背包式三维激光扫描仪具有作业效率高、信息采集丰富和操作简单等特点[11-14]。其以扫描视角的多样性和互补性的特点逐渐成为智慧城市三维数据快速获取的重要手段[15]。本文研究了徕卡背包式三维激光扫描仪的技术特征,结合实际村庄地籍调查底图测量工作,分析了该设备在地籍测量项目的可行性,并与传统技术手段进行了对比分析,为测绘新技术在地籍测量的应用提供了技术参考[16]。
1 背包式三维激光扫描系统
1.1 外业扫描
Pegasus Backpack 是徕卡测量系统推出的全新移动实景测量背包[7],配备5 个相机和两个激光扫描仪,通过平板电脑控制系统,采用碳纤维材质和人体工学设计制作而成,是当前市场上集高性能、高精度和便携性于一体的高端移动测量背包系统[9]。其主要参数如图1所示。

图1 Pegasus Backpack测量系统参数
Pegasus Backpack集成了GNSS、惯性导航、摄影测量和三维激光扫描等前沿科技,GNSS 提供测量设备的准确位置,惯性导航采集测量设备的前进方向和照相机姿态,摄影测量根据GPS 和惯导数据得到外方位元素等信息,三维激光扫描获取周围海量点云数据。该系统属于技术领先、精度可靠的测量采集装备,可实现无需通视、单人作业的采集作业模式。
1.2 内业处理
Pegasus Backpack 通过可穿戴的移动扫描方式完成数据采集工作。Pegasus Backpack 外业扫描结束后,内业处理分别利用Inertial Explorer、Infinity 和Pegasus Manager软件进行轨迹解算、坐标系构建和点云处理。
内业处理详细流程为:①收集原始扫描数据、基准站、流动站和控制点数据,为后续点云解算提供数据基础;②利用Inertial Explorer 对基站数据进行转换和组合式轨迹解算,生成最终的点云轨迹数据;③利用Infinity 定义坐标系转换和投影参数,将原始点云数据转换到需要的坐标系;④利用Pegasus Man⁃ager 进行照片提取、SLAM 处理和点云生成等操作;⑤通过控制点纠正点云数据,获得高质量的点云数据,如图2所示。
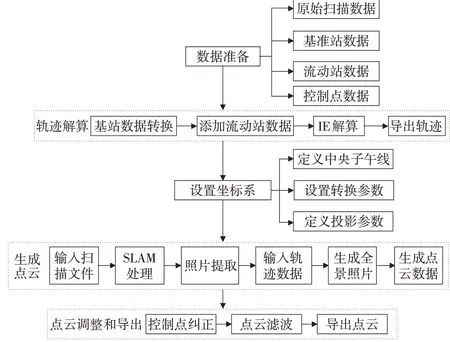
图2 Pegasus Backpack测量系统内业数据处理流程图
2 实验分析
实验区域选取苏州市吴中区三星村,长约260 m、宽120 m,总面积为31 200 m2。该区域的房屋建筑结构复杂,测量要素繁多,村民随意搭建建筑,建筑风格各异,在常规测量模式下,需要大量的测量人员,效率低下,满足不了甲方的迫切要求。
本次首次采用徕卡Pegasus Backpack 进行扫描测试,外业扫描结束后得到的点云如图3 所示,可以看出,三星村的房屋呈紧凑型、密度大、道路狭窄,GPS在农村道路上信号不佳,遮挡较严重,需要全站仪多次架站;常规作业难度过大、效率过低。本文采用MicroStation Connect Edition 自主开发的三维测图软件,其具有点云编辑、建筑物轮廓线自动提取和快速成图等功能,可快速处理海量点云数据。本文利用该软件绘制的三星村地籍成果图如图4所示。
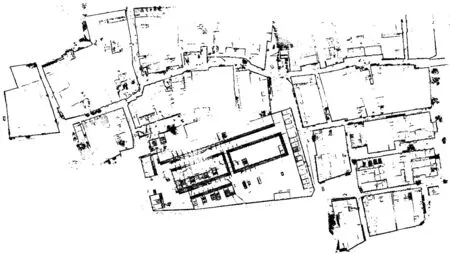
图3 三星村地籍点云图

图4 三星村地籍成果图
为了验证背包点云的精度和效率,本文在三星村抽样选取了部分房角点和房屋边长,利用传统测量技术(GPS+全站仪和测距仪)进行实测,并将实测值与点云的成果图进行对比分析。传统测量技术是利用GPS测设控制点,全站仪架设在控制点上,以另外一个GPS控制点作为后视定向,以全站仪为主、测距仪为辅,完成房角点和房屋边长测量。对比结果如图5~6所示,可以看出,背包点云与传统测量技术获得的房角点平面位置中误差为4.1 cm,获得的房屋边长实测值中误差为2.5 cm,GPS 信号不佳的地方房屋边长误差较大。
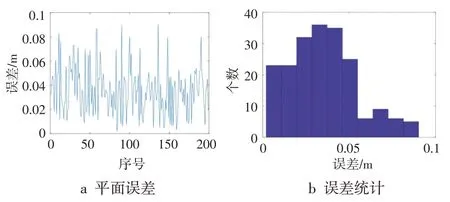
图5 背包点云和传统测量技术获得的房角点平面误差和误差统计图
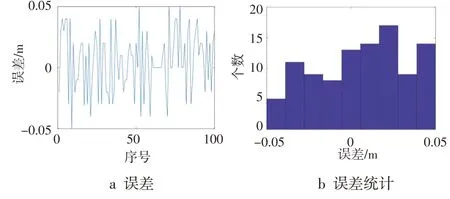
图6 背包点云和传统测量技术获得的房屋边长误差和误差统计图
隐蔽房角点需要多次搬站,必将影响作业效率和精度,该项工作是地籍测量的难题。传统测量技术通过距离交会、截距法等方法获取隐蔽房角点的坐标,而背包式三维激光扫描仪利用自身的SLAM 算法和惯导系统可解决大部分隐蔽房角点的测量难题,剩余的隐蔽房角点则通过传统测量技术进行补测。为了验证背包式三维激光扫描仪在隐蔽房角点和房屋边长的测量精度,本文选取了50个隐蔽房角点坐标和30个隐蔽房屋边长,对比结果如图7~8所示,可以看出,背包点云与传统测量技术获得的隐蔽房角点平面位置中误差为5.0 cm,获得的房屋边长实测值中误差为3.9 cm,满足地籍测量精度要求。实验结果表明,背包点云在测量隐蔽房角点的平面位置和房屋边长方面,不仅保证了测量精度,还提高了作业效率,避免了传统测量技术多次搬站造成的影响。
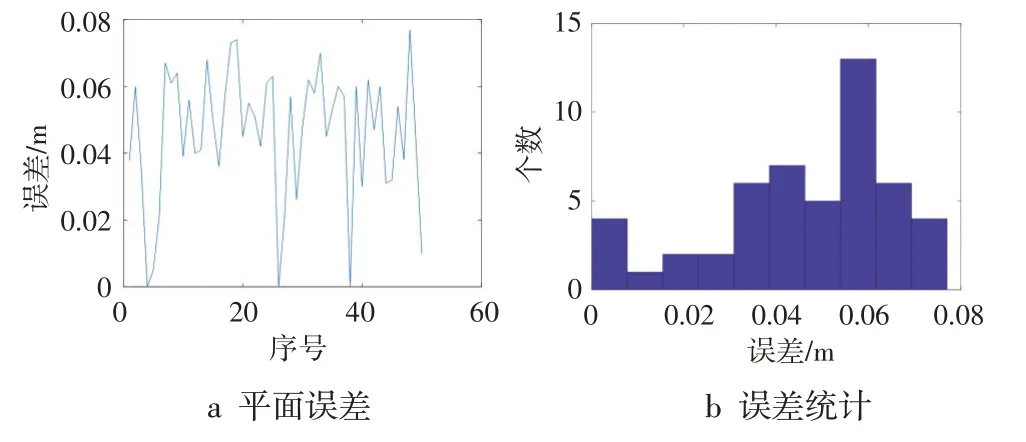
图7 背包点云和传统测量技术获得的隐蔽房角点平面误差和误差统计图
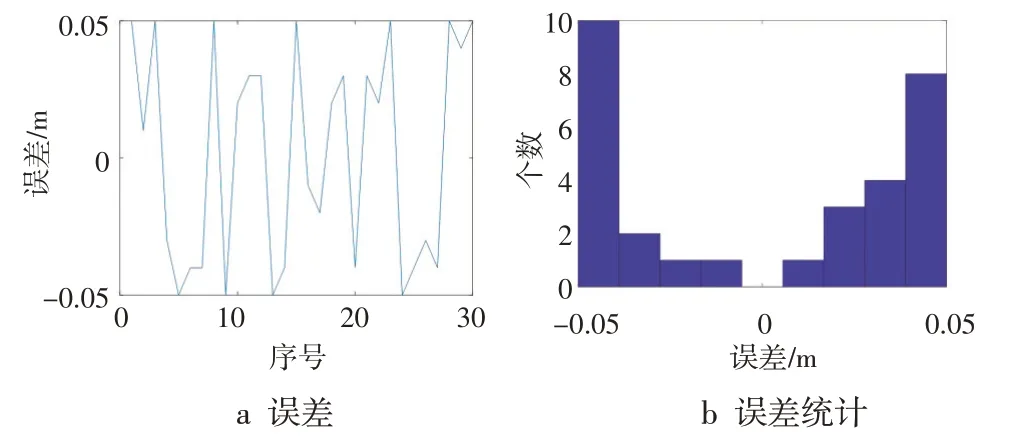
图8 背包点云和传统测量技术获得的隐蔽房屋边长误差和误差统计图
为了对比两种作业模式的效率,本文统计了二者的作业时间,结果如表1 所示,可以看出,背包式三维激光扫描仪比传统测量技术作业时长缩短了53%,降低了一定的工作强度,提高了地籍测量的整体作业效率。

表1 传统测量技术和背包式三维激光扫描仪作业效率对比
3 结 语
随着城镇化建设的不断发展,为了加快和落实国家对全国农村土地的调查工作,村庄地籍测量项目不断增加。传统的GPS+全站仪和测距仪的作业模式受环境和房屋现状复杂等因素影响,作业效率偏低,不能满足村庄地籍快速更新的要求。本文采用徕卡背包式三维激光扫描仪对村庄进行外业扫描,生成建筑物海量点云数据,然后利用自主研发的Micro⁃Station Connect Edition 三维测图软件快速绘制村庄地籍调查工作底图。本文从平面位置精度、相对长度和作业效率等方面,对背包式三维激光扫描仪与传统测量技术进行了对比分析,结果表明背包式三维激光扫描仪不仅能满足村庄地籍调查工作底图的测量要求,解决隐蔽房角点和房屋边长的测量难题,而且较大幅度地提高了整体作业效率,扫描过程中应注意快速穿过信号不佳区域。背包式三维激光扫描仪为村庄地籍调查工作底图快速、准确测量提供了新的技术手段。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
小学生学习指导(中年级)(2021年10期)2021-11-01
农民文摘(2019年11期)2019-11-15
学苑创造·B版(2019年6期)2019-07-12
模具制造(2019年3期)2019-06-06
摄影之友(影像视觉)(2017年10期)2017-11-07
作文周刊·小学一年级版(2016年42期)2017-06-06
中学数学杂志(高中版)(2015年3期)2015-05-28
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14