
土地调查中无人机摄影测绘技术的应用研究
2022-08-02 03:05刘善彬
能源与环保 2022年7期
刘善彬
(河南省航空物探遥感中心,河南 郑州 450053)
随着我国社会经济的快速发展以及城市化进程的不断推进,对土地的需求量日益紧张,对土地调查工作的需求也越来越大。传统的土地调查方法已经无法满足现代化的发展需要[1]。随着现代技术的不断发展,当前计算机技术以及现代遥感技术都已经成功的应用到土地调查工作中来,发挥了很大的作用,极大改善了土地调查工作量,提升了此项工作的质量和效率[2]。现阶段在土地调查工作中使用较多的是卫星遥感影像技术,但此项技术的费用较高、制作周期较长,暴露出了一定的弊端[3]。因此,急需研究更加先进、成本更低、效率更高的技术取代传统的卫星遥感影像技术。近年来,无人机获得了高速发展,在很多领域得到了广泛应用,具有动力能耗低、可操控性强等众多优势[4]。所以,可以将无人机作为搭载平台基于遥感影像技术开展土地调查工作。目前已有很多学者和技术人员针对此问题开展研究,发现基于无人机的摄影测绘技术具有更高的分辨率,应用效果显著[5]。本文主要分析了无人机摄影测绘技术在土地调查中的应用情况,对于提升土地调查工作的质量和效率具有重要的理论和现实意义。
1 无人机遥感系统
无人机遥感系统的主要构成部分如图1所示,由图1可知,整个系统由5大部分构成,以下对其进行详细介绍[6]。
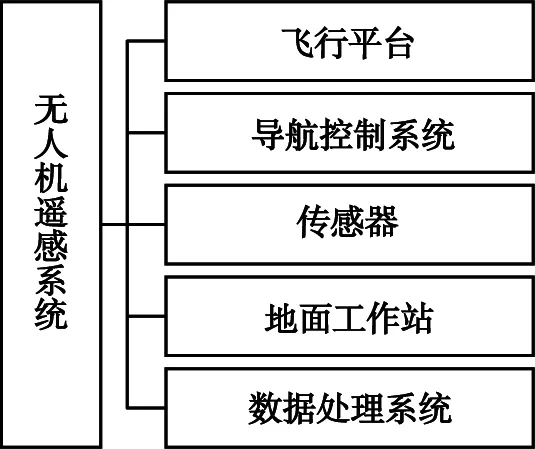
图1 无人机遥感系统主要构成部分Fig.1 Main components of UAV remote sensing system
(1)飞行平台。飞行平台是指飞行器本身,遥感系统中的其他设备包括传感器等都需要搭载在平台上运行。
(2)导航控制系统。是无人机最关键的部分,作用是确保无人机按照设定的路程飞行,主要包括GPS导航系统、IMU惯性导航传感器、气压传感器等。导航控制系统接受地面控制器的指令,在确保飞行过程安全和稳定的前提条件下按照下达的飞行速度、方向和高度进行飞行。在GPS和IMU的综合作用下,无人机在拍摄图像时可以将设备的仰俯角、侧滚角、高度、航偏角以及经纬度等数据信息嵌入到照片中,以上数据可以为后续图像处理提供数据支撑。一般而言,根据规划设计提前设置好无人机的飞行路线,整个飞行可以自动化完成,无需人为干预。
(3)传感器。无人机遥感系统中使用的传感器就是具有高分辨率的单反数码相机,也有部分系统会搭载雷达设施。由于相机拍摄时处于运动状态,因此拍摄得到的照片通常会发生一定的影像畸变,在后续处理时需要对畸变图像进行矫正处理,具体矫正系数需要结合无人机的飞行状态数据进行确定。
(4)地面工作站。地面工作站主要由监控软件、计算机以及无线电台等部分构成,作用是与飞行设备保持联系,向无人机下达控制指令,并接收来自无人机的飞行数据和拍摄数据。无人机起飞前需要利用地面工作站设置起飞点、落脚点以及具体飞行数据和拍摄参数,系统自动生成相应的飞行参数,包括飞行高度、飞行路径等。
(5)数据处理系统。作用是将拍摄获得的图像进行分析处理,在拍摄现场即可对照片质量进行检查,后期可对照片进行深度挖掘处理,获得正射影图像。
2 试验区概况及无人机影像获取
2.1 试验区基本情况
为了对无人机摄影测绘技术的效果进行分析与评价,选择西南区域某城镇作为试验对象。试验区域的面积为140 km2左右,辖区内包含有多种土地类型,比较具有代表性。此城镇地处亚热带,属于温带季风性气候,夏天温度不高,冬季气候不冷,四季分明,年平均温度15 ℃,降雨量1 345 mm。
2.2 无人机影像获取
(1)无人机概述。考虑到试验区域的地形地貌特征以及试验所需数据基本要求。试验中选用的无人机型号为EBEE,属于微型无人机,此无人机在市场上比较常见,经过实践证明具有较好的稳定性[7]。航测系统是无人机中非常重要的构成部分,主要包括通信系统、操作平台和航线规划控制模块等。软件和硬件的综合运用可以完成基于无人机的影像测绘过程。EBEE型号无人机的关键技术参数统计情况见表1。另外,无人机可以结合实际工作需要搭载不同形式的传感器。常见的包括近红外相机、RGB相机等。结合本次试验对影像数据的基本要求,选用的是数码定焦相机,其像素为1 600万、焦距为14 mm。

表1 无人机关键技术参数Tab.1 Key technical parameters of UAV
(2)基本工作流程。无人机影像获取基本流程如图2所示。

图2 无人机影像获取基本流程Fig.2 Basic process of human-machine image acquisition
在利用无人机进行航拍前,需要对试验区域的现场情况进行实地勘察,并收集有关数据资料,结合实际情况设计飞行器的航飞路径,同时向有关部门申请飞行需求[8]。无人机在飞行过程中利用数码定焦相机拍摄获得影像数据,数据处理系统可对图像进行初步分析,确保所有影像数据均满足质量要求,利用系统内置程序对图像进行矫正处理。另外,还需要基于像控点确保图像的正确性。完成以上工作后即可获得质量满足要求的原始影像图片。
3 无人机影像数据处理
3.1 技术流程
搭载在无人机中的数码定焦相机采集得到的影像数据,其分辨率可以达到0.08 m。对影像数据进行初步处理后,需要对其进行深入挖掘分析,无人机影像图片数据处理技术流程如图3所示。技术流程可以概述如下:在对航拍影像图片进行初步矫正处理后,进行空中三角测量可生成数字高程模型DEM。DEM是在影像图片的基础上结合有限地形高程数据形成的地面地形数字化模型[9]。进一步利用DOM技术可以对影像图片数据进行数字微分纠正与镶嵌,具体而言包括3个方面的内容,分别为正射矫正、色彩调整和影像拼接,最终可以获得数字正射影像图,即DOM。DOM中涵括有丰富的数据信息,且数据获取方便,图像直观逼真等[10]。在土地调查工作中展现出了明显的优势。

图3 无人机影像图片数据处理技术流程Fig.3 Technology process of UAV image data processing
3.2 影像图片控制点布设
影像图片控制点测量工作是开展空中三角测量的重要基础。控制点选择的合理性会对后续图像分析处理工作带来显著影响,最显著的影响是降低处理精度。实际飞行测量中,测量区域通常会包含2条及以上的平行航线布设,具体控制点布设方案为:

(2)航线数量与比例尺之间的关系如图4所示,旁向相邻平面控制点的航线数量根据图4所示的基本规则进行选取。
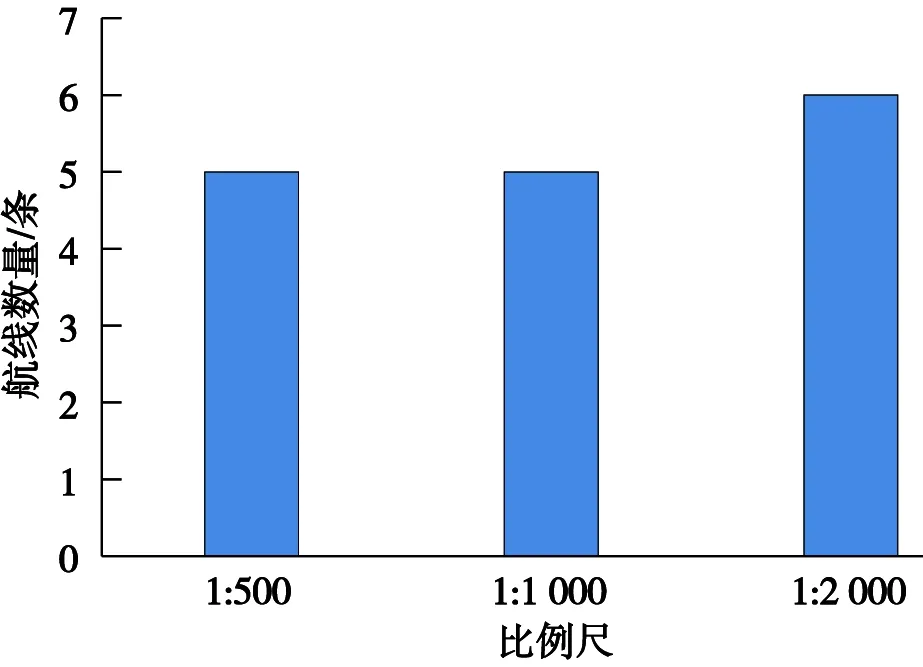
图4 航线数量与比例尺之间的关系Fig.4 Relationship between the number of routes and the scale
(3)在生成数字高程模型DEM和数字正射影像图DOM过程中,都需要用到高程控制点,所以高程控制点布设质量会对DEM和DOM的生成过程和结果产生非常重要的影响。在布设高程点时应该根据航线逐条布设,保证控制点的均匀性。在航线的起点和终点2个位置必须布设高程控制点。
(4)对于部分特殊区域采集高程控制点时可能会存在一定难度,比如戈壁、沼泽、沙漠、森林等,对于以上区域高程和平面误差均可以适当扩大到原有的0.5倍,所以在布设控制点时也可适当放宽要求。
3.3 DEM生成
DEM是根据试验区域地形地貌特征采集获得的影像数据,基于设定的规则进行拼接以后覆盖整个范围的包含有高程信息的数字化模型,由多个不重叠的三角形构成。生成DEM时,首先需要对布设控制点的高程及平面位置信息进行采集,然后以控制点为整体框架体系,基于插值方法对其他位置的高程和位置信息进行拟合,从而获得DEM。本研究中,采集得到相关数据图像信息后,利用Photo Scan软件对数据进行分析处理,基于人工数据采集+软件自动匹配的方法生成DEM,可以满足DEM生成精度以及处理效率的基本要求。在软件中可以设定好网格间距,通过对DEM进行分块立体编辑的方式实现高程点的自动化匹配。对于一些特殊的地形区域,需要对区域中的关键位置,如山头、洼地等的平面位置和高程信息进行采集,在此基础上构建立体三维模型。DEM生成结果案例如图5所示。

图5 DEM生成结果案例Fig.5 DEM generation result case
3.4 DOM生成
受到拍摄环境、时间、角度等多方面因素影响,获取的影像图片其色彩和亮度等通常会存在明显的差异。如果不对影像资料的亮度和色彩进行标准化处理,那么在图像拼接过程中可能会存在较大的误差或者缝隙,所以对图像进行拼接前需要对其色彩进行调整。本研究中基于Photoshop软件对图像的色彩进行标准化调整处理,在软件中设置好标准数据后可以实现大批量调整,确保图像具有相同的饱和度、色彩、亮度、对比度等。完成色彩调整工作后对图像进行拼接即可得到数字正射影像图。
4 土地类型的内业解译
4.1 解译方法选择
由于无人机摄影获得的影像图片只能够反映对象的光谱信息,系统难以对图片中的土地类型进行自动化提取分类。本试验过程中主要通过人工方式对处理后的图片,根据相关区域的质地、色彩和形状等信息进行内业解译。
4.2 解译标志构建
(1)土地类型采集。正式对土地类型进行解译前,首先要通过调查走访的形式了解该地区具体的土地类型,并建立标准的样本库,以此作为解译的重要标准和基础。通过实地调查发现试验区域共包含12个一级类和33个二级类。试验区域土地类型基本情况如图6所示。
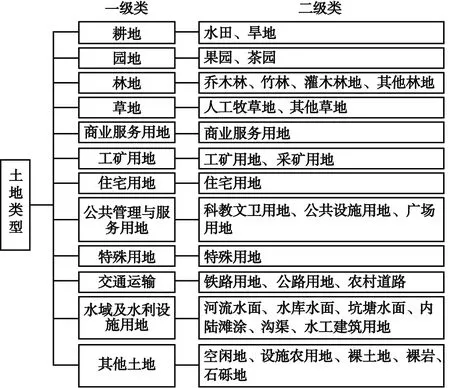
图6 试验区域土地类型基本情况Fig.6 Basic conditions of land types in experimental area
(2)解译标志构建。不同土地类型有其特有的文理特征,在内业解译过程中只需要对图片的纹理特征进行辨识即可辨别对应的土地类型。所谓解译标志就是在无人机摄影图像上找到相关影像特征,为判别土地类型或者典型地理位置等奠定坚实的基础。解译人员在综合分析图像类型、比例尺、季节气候、摄影时间等因素的基础上,对土地类型进行内业解译。本研究在构建解译标志时的方法可以分为2种类型,分别会直接构建法和间接构建法。直接构建法是对影像图片的形状、色彩、纹理、阴影等特征进行判定,以建立对应土地类型的基本影像特征。间接构建法则是根据相邻土地类型之间的联系以及分布特征等,间接地判断对应土地类型的影像特征。
(3)内业解译。解译过程中对于宽度大于5 m的管道、道路、铁路、沟渠等按照实际情况进行调查标记,部分宽度相对较小但是具有重要作用和功能的道路等也要进行标记,其他情况可以将其归类到相邻土地类型处理。另外,如果某区域内对应的土地类型面积相对较小,可以将其归类到相邻土地类型处理,典型地块类型的最小上图面积如图7所示。

图7 不同地块类型的最小上图面积Fig.7 Minimum above image area of different parcel types
对于建设用地和设施农用地,面积超过200 m2才单独标记为对应的土地类型,农用地和其他地类面积分别超过400 m2和600 m2时单独标记为对应的土地类型。基于无人机摄影测绘技术的试验部分区域内业解译结果如图8所示。
5 无人机摄影测绘技术的应用效果评价
为了对无人机摄影测绘技术的应用效果进行评价,在利用无人机遥感影像进行内业解译的基础上,在试验区范围内选取部分区域开展外业实地调查工作。实验区域面积约为18.13 km2,内部包含有7个一级类和22个二级类,非常丰富,可以很好地反映无人机摄影测绘技术的应用效果。将基于无人机获取的内业解译结果与外地实地调查结果进行对比分析,发现两者存在差异的面积为0.82 km2,两者完全相同的面积为17.31km2,不同地块类型的内业解译误差统计结果如图9所示。基于图9中数据可以看出,7个一级类地块中平均误差面积均相对较小,交通用地的平均误差面积最大,为0.030 8 km2。各种地块的误差平均值也相对较小,林地的相对误差是最大,为4.8%。出现这种情况的原因:①林地与耕地、园地、草地的影像图片纹理比较相似,容易错误地将林地解译成为其他土地类型,比如耕地、园地、草地等;②无人机摄像头分辨率不够高。
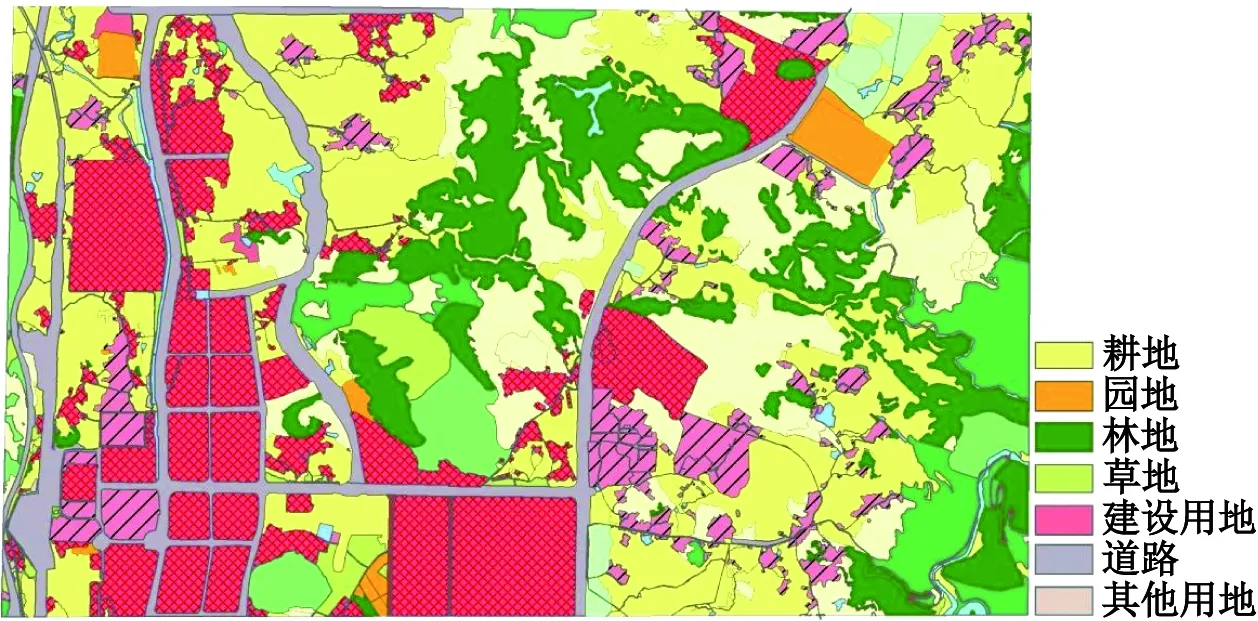
图8 基于无人机摄影测绘技术的试验部分区域内业解译结果Fig.8 Internal interpretation results in some areas of trial based on UAV photography surveying and mapping technology

图9 不同地块类型的内业解译误差统计Fig.9 Internal interpretation error statistics of different parcel types
综上所述,基于无人机摄影测绘技术的内业解译结果与外业实地调查结果具有非常高的相似度,不同土地类型的内业解译的正确率均超过95%。如果使用分辨率更高的数码摄像机,则可以进一步提升内业解译的结果精度。
6 结论
本文主要以无人机摄影测绘技术为研究对象,将此项技术用在土地调查工作中,所得结论主要有:
(1)无人机遥感系统是开展土地调查摄影测绘工作的硬件设施,主要由飞行平台、导航控制系统、传感器、地面工作站以及数据处理系统等部分构成。利用遥感系统可以获得研究区域范围内的影像图片。
(2)通过合理的设置控制点,并使用专业软件可以在影像图片的基础上进行数据处理,生成包含有高程信息的DEM和DOM数据资料,为后续的内业解译工作奠定坚实的基础。
(3)对试验区域土地类型进行调查发现共包含有12个一级类和33个二级类,在此基础上根据影像图片中的色彩、形状等特征可以对土地类型进行高精度解译,解译时对于形状和面积较小的区域可以并入相邻土地类型中。
(4)在试验区域内选择面积为18.13 km2的区域开展外业实地调查工作,并将结果与内业解译结果进行对比分析,发现内业解译结果平均误差面积和误差平均值均相对较小,内业解译精度达到了95%以上。
猜你喜欢
建材发展导向(2022年12期)2022-08-19
军民两用技术与产品(2022年1期)2022-06-01
资源信息与工程(2021年5期)2022-01-15
铁道勘察(2021年6期)2021-12-27
全球定位系统(2021年1期)2021-03-26
当代陕西(2020年23期)2021-01-07
四川建材(2020年6期)2020-01-04
中国交通信息化(2019年3期)2019-06-18
消费导刊(2017年8期)2018-01-18
北京航空航天大学学报(2017年4期)2017-11-23
