新型频率自动跟踪可重构天线设计
2022-08-02 08:27石真宇
无线电工程 2022年8期
石真宇,陈 星
(四川大学 电子信息学院,四川 成都 610065)
0 引言
一些通信设备需要经常性地在2个或多个频率点之间切换工作,例如WiFi设备有时需要在2.45 GHz和5.8 GHz切换[1-3],Bluetooth设备在2.4 GHz的ISM频段也有多个不同工作频率的信道[4-5]。对这些设备,当发射端切换工作频率后,接收端应该能够自动探测到频率变化并实时地将天线切换到新的工作频率,即具有频率自动跟踪功能。
为了实现频率自动跟踪,首先需要实现一款可以接受控制使工作频率切换的天线,频率可重构天线可以满足这个要求[6-8]。频率可重构天线有多种实现方式[9]。文献[10]采用MEMS开关调节天线的电长度,设计了一只能够在2.45 GHz和5.8 GHz切换工作频率的频率可重构天线。文献[11]针对ISM频段的WiFi应用,基于变容二极管设计频率可重构天线,实现在2.4~2.5 GHz和5.2~5.825 GHz两个工作频段之间切换。除了使用MEMS器件,采用PIN二极管[12-14]或变容二极管[15-16]等电子器件设计可重构天线也得到了重视和研究。本文采用PIN二极管为受控器件,实现一款频率可重构天线。
频率可重构天线设计完成后,还需要设计与之配套的电路,输出控制信号给天线,实现频率自动跟踪功能。文献[17]使用了功分器,将端口输入功率的一部分传输给整流电路,根据不同的频率微波能量输入,整流电路输出不同的电压用于控制PIN二极管的开启和关断,实现天线在1.22 GHz和1.56 GHz之间自动切换。文献[18]中天线有2个端口,一个端口作为天线的馈电口,另一个端口接收微波能量,通过整流电路得到直流,然后用于控制天线中的PIN二极管导通和断开状态,实现了天线在2.85 GHz和5.52 GHz两个频率之间自动切换。上述天线控制电路较为固定,若天线工作环境或频率等发生变化,天线要正常工作就需要对电路参数做一些改变,灵活性不强。
本文通过使用检波器处理天线接收到的功率,使用微控制器采集检波器输出,用于分析接收幅度,来对天线进行控制。通过微控制器搭建频率跟踪控制器电路与固定整流电路相比有更好的灵活性,能根据不同的使用环境对控制参数精细调节,更加利于天线工作状态的控制。同时,使用微控制器能实时输出天线的工作状态,具有灵活的数据接口,能嵌入到更大的天线系统中,完成更多的工作。
1 天线结构
本文以矩形贴片天线为基础,进行频率可重构天线的设计。天线结构如图1所示。

图1 天线结构Fig.1 Antenna structure
图中,L2为矩形贴片天线的边长。在贴片天线的基础上,天线的纵向上加入2块金属条,长度分别为L1和L3,宽度为W1,长度与矩形贴片天线的长度L2相等。同时,在上下金属贴片和矩形贴片天线之间加入PIN二极管,控制金属贴片和天线主体之间的连接。当PIN二极管开启时,天线的总长度变大,使频率向低端偏移,实现了天线频率可重构。根据PIN二极管封装大小,选择金属贴片和天线之间的距Lp。同时,需要在天线上加入PIN二极管直流偏置回路。在天线纵向上再加入2片边长为W2的金属矩形贴片,在贴片上加入过孔连接到天线背面的地。同时,加入2个电感,在馈电口、PIN二极管和地之间形成直流通路。
根据以上结构,对天线进行仿真。查看天线的电场分布图,分析切换PIN二极管状态是否能达到改变天线工作状态的目的。在软件中切换PIN开启和关闭状态,进行仿真。2种状态下天线电场分布如图2所示。可以看出,PIN二极管的开断能在纵向上改变天线电场分布,与分析吻合。
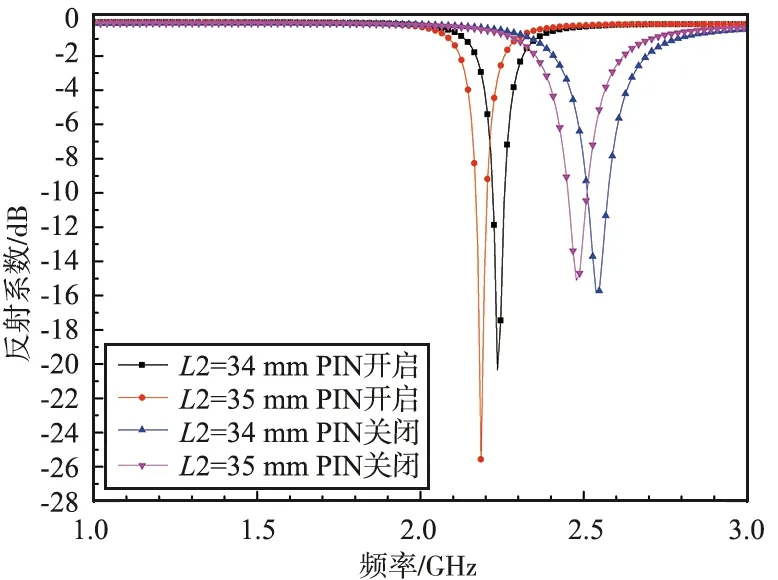
本文选择2.45 GHz左右的2.17 GHz和2.54 GHz两个频点作为天线的2个工作频点。为了使天线工作频率符合要求,对天线的尺寸参数进行仿真分析。天线的主要工作频率由贴片天线的尺寸决定。参数L2变化,天线的2个工作频点都将发生变化,如图3(a)所示,L2的长度分别为34,35 mm时,2个工作频点都会发生变化。而调整L1和L3的大小,会影响较低频率的工作点而不会影响较高频率的工作点。首先使L1与L3宽度之和保持一致,改变L1与L3之间的差值,会影响天线的匹配效果。如图3(b)所示,L1与L3相等时并不一定能取得最好的匹配效果,从仿真结果可以看出,相差0.5 mm时能有较好的匹配效果。其次,根据前面的仿真结果,使L1与L3的和变大,L1与L3的差值为0.5 mm进行仿真,这时较低频率工作点工作频率逐步降低,如图3(c)所示。

(a) PIN二极管关断
(a) 矩形贴片边长变化
根据以上分析和仿真结果,为了满足天线工作频率要求,选择天线L1为2.5 mm,L2为34 mm,L3为2 mm。同时,根据PIN二极管封装选择Lp为1 mm,W2选择2 mm,基板材质为F4B,厚度为2 mm,PIN二极管型号为BAR64,电感大小为36 nH。
2 频率跟踪控制器设计
频率跟踪控制器主要由微控制器芯片、模数转换器、数模转换器和对数检波器组成。频率跟踪控制器中核心部分为检波器,用来探测接收信号的幅度。对数检波器将不同功率的输入转化为对应线性的电压输出,再通过模数转换器采集。同时,电路板上绘制了直流偏置电路,数模转换器输出电压通过偏置电路、馈线和天线形成直流回路。
控制器可以通过USB总线和计算机之间传输信息,可以将微控制器通过模数转换器采集的功率信息传输到电脑。同时,可以通过软件,将控制信息发送到控制器,达到调节控制器控制模式的目的。控制电路板如图4所示。
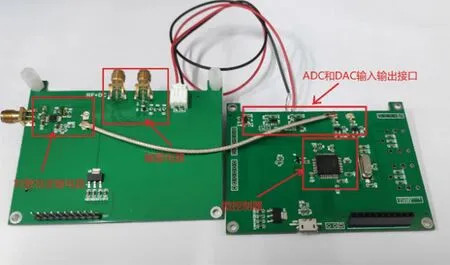
图4 控制器电路板Fig.4 Circuit board of the controller
3 测试结果
天线焊接完成后,如图5(a)所示。对天线的反射系数进行测试,分别测试PIN二极管开启和关闭2种状态下的参数,测试结果如图5(b)所示。
(a) E面仿真与实测方向图
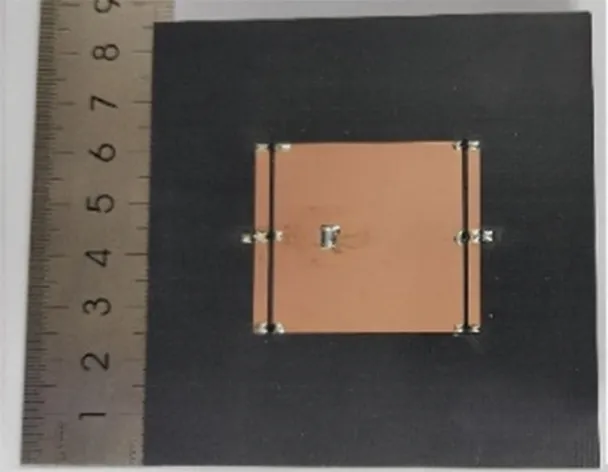
(a) 天线实物
可以看出,天线的2个工作状态的测试结果基本与仿真结果一致。PIN二极管开启和关闭对应2.17,2.54 GHz两个工作频点,对应频点反射系数小于-10 dB的带宽分别为37,55 MHz。
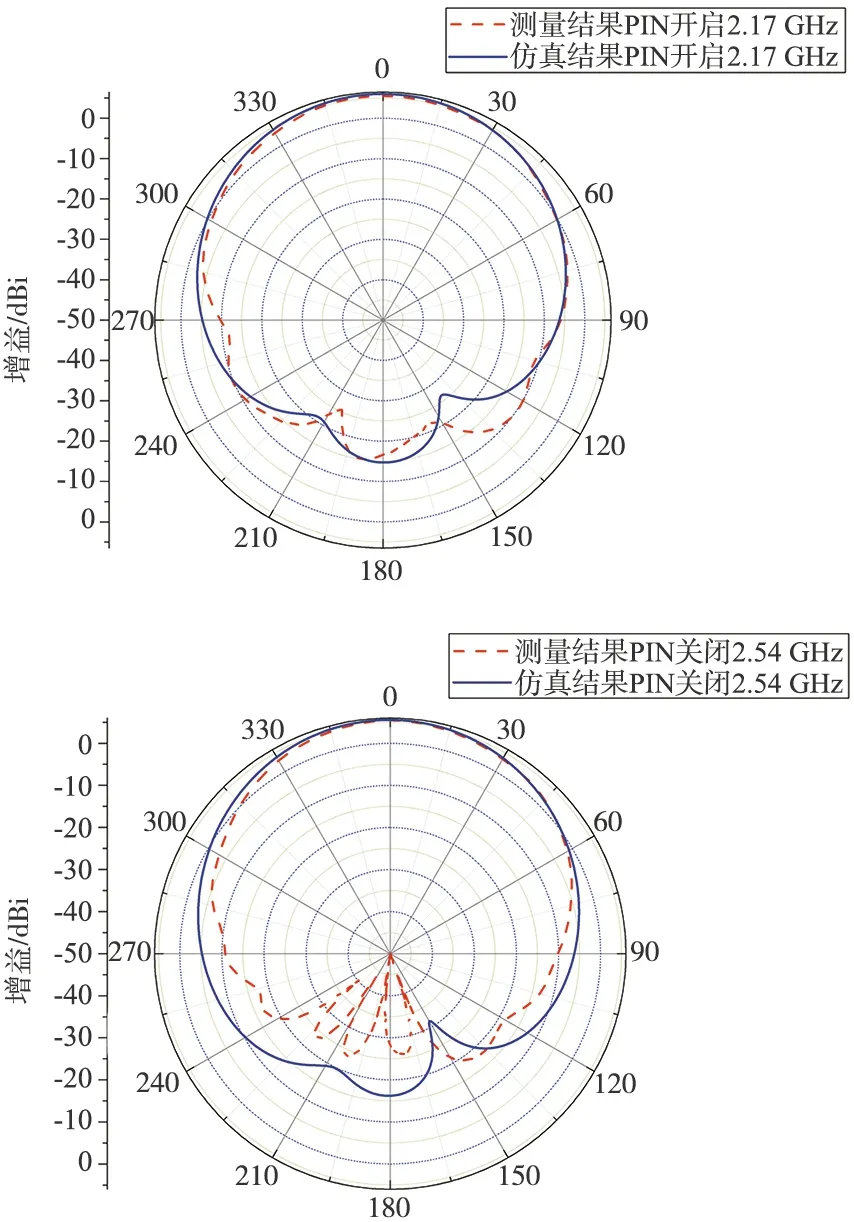
分别测试PIN二极管开启和关闭时E面和H面的方向图,如图6所示。其中,2.17 GHz增益为4.6 dBi,2.54 GHz增益为5.5 dBi。实测方向图基本与仿真一致,180°左右的实测方向图与仿真结果有一些差异是由于馈电和控制电路在天线背面导致的,并不影响天线的使用。
对天线2个工作状态下的接收幅度进行测试,使用矢量网络分析仪进行测试,将一个发射天线接入矢量网络分析仪的一端口,将本文的天线接入矢量网络分析仪的二端口,通过记录S21数据,得到天线在2个工作状态下各个频率的接收幅度,如图7所示。
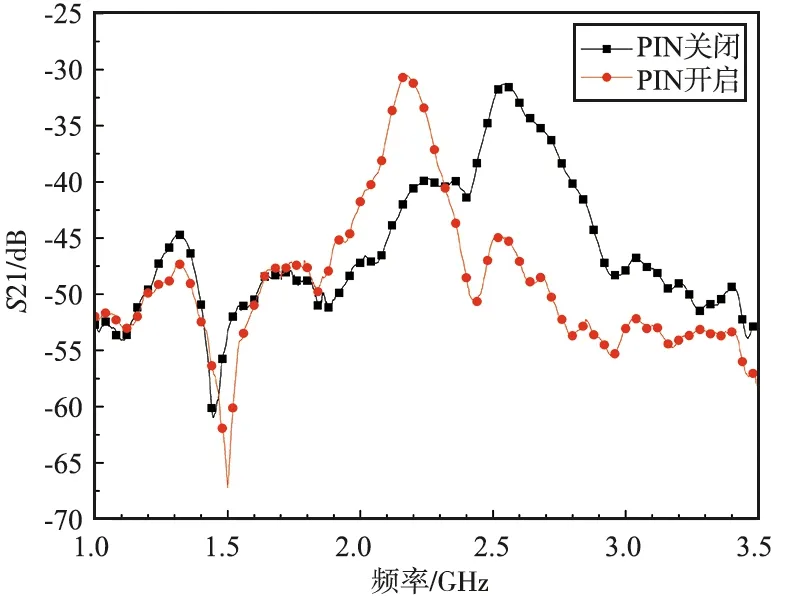
图7 2种工作状态天线接收信号幅度Fig.7 Amplitude of the received signal in two operating states
可以看出,天线在2个工作状态对应的频率处接收幅度较强,其余的频率处接收较弱,2个工作频率接收幅度差值都在10 dB以上,满足检波器的检测需求。
天线测试完成后,对整个系统进行组装和测试。测试系统部分包括信号源、发射天线、频率可重构天线、频率跟踪电路和计算机。频率可重构天线为系统的核心组成部分,控制器起到自动频率控制的作用,信号源提供不同的频率输出,计算机用于显示系统工作状态。搭建测试平台如图8所示,由信号源发射不同频率的信号,接收部分对信号进行处理和显示。

图8 测试平台Fig.8 Test platform
控制器使用USB接口传输采样的天线接收功率给电脑,电脑通过软件绘制功率信息图,也能显示天线的工作频率。同时,根据发射和接收端的距离,软件中设置好切换阈值。系统搭建完成后,即可对天线的频率跟踪功能进行测试。通过修改信号源的频率,观察天线的切换效果,同时计算机记录和显示天线的接收功率,如图9所示。

图9 监测软件Fig.9 Monitoring software
当发射端频率改变时,新的发射频率不在此时天线谐振频率范围内,接收功率幅度变低。控制器控制PIN二极管全部开启或者关闭切换天线工作频率,接收功率重新回升,即可判断发射机切换了工作频率。从图9接收功率变化情况可以看出,信号源在2.17 GHz和2.54 GHz切换时,接收功率变化,天线随即切换工作频率,功率也跟随变化。同时,软件显示天线工作的频率切换正确,说明天线各项功能工作正常,能完成切换频率的任务。
4 结束语
通过分析和仿真,设计了一款频率可重构天线。经过实测,本文设计的频率可重构天线工作状态良好,反射系数和方向图测试结果与仿真结果相吻合。同时,在频率可重构天线的基础上,设计了天线频率跟踪控制器,使整个天线系统能根据发射频率的变化,自动改变天线的工作频率。经过系统搭建和测试,整个系统频率跟踪功能工作状态良好,能有效地实现自动切换功能,控制软件工作状态良好。通过USB接口能输出天线实时接收功率,可以使用输出的数据进行更加丰富的控制工作,具有一定的扩展性。
猜你喜欢
电子测试(2022年19期)2022-11-11
当代陕西(2022年4期)2022-04-19
摄影世界(2022年1期)2022-01-21
北京航空航天大学学报(2021年9期)2021-11-02
东西南北(2019年6期)2019-04-30
小朋友·快乐手工(2017年10期)2018-01-05
小康(2017年34期)2017-12-08
天津诗人(2017年2期)2017-11-29
职业·下旬(2017年1期)2017-04-05
中学物理·高中(2016年1期)2016-05-26