基于扩张状态观测器的发动机转速双闭环自适应控制系统设计
2022-08-02 11:01徐亦卿陆海澎
计算机测量与控制 2022年7期
徐亦卿,陆海澎
(常州工业职业技术学院, 江苏 常州 213164)
0 引言
在发动机双闭环控制回路中,内环体系内的所有电压数值均相等,而当内环电压出现突然的升高或降低时,与之对应的外环体系就会表现出一个标准电压差,这也是导致电信号驱动行为难以保持完全统一状态的主要原因。在实际应用过程中,外环体系的存在就相当于一个标准参照物,只能对内环电信号表现行为提供一定的反馈,并不能对其具体数值水平进行标注与修改[1-3]。扩张状态观测器是一种特殊的自抗扰控制器元件,可以根据系统外部输入变量与输出变量的实测值结果,判断系统主机所具备的动态运行能力,也叫状态重构器设备。简单来说,这种观测器元件的应用实质就是一个符合系统执行标准的模型结构,且由于连接能力的可协调性,所有状态变量都是由管控主机直接输出的。大多数扩张状态观测器都采取闭环连接的运行方式,不但能够克服开环状态观测器的各项应用弊端,也可以将主机元件完全解放出来,使其在维持系统动力供应条件的同时,具备独立处理干扰性问题的能力。通常情况下,正是由于扩张状态观测器的存在,各类复杂待控对象才能按需接入动力系统的既定模块单元之中,不但解决了控制对象过于依赖动力主机的问题,也将闭环网络完全解放出来,使其能够自发处理输入变量与输出变量之间的动力限制问题。
为对发动机元件的转速水平进行控制,传统非谐波傅里叶变换测量系统以PIC18F4525单片机元件作为核心控制器,在弹簧电磁驱动气门结构等多个执行器设备的作用下,判断当前时刻进气压力对发动机转速水平的影响强度,再根据傅里叶原则,对所得计算值结果进行判断与处理[4]。然而随着进气压力水平的改变,该系统对于发动机设备实时转速水平的控制与约束能力并不能完全达到实际应用标准。
为解决上述问题,应用扩张状态观测器设计了一种新型的发动机转速双闭环自适应控制系统。硬件执行环境由双闭环集成电路、发动机控制器、自适应传感器、隔离驱动芯片、观测器驱动管五部分组成,双闭环集成电路由动力源分路、集成分路、观测信号放大分路三部分组成,能够将发动机的速度等级维持在一个比较稳定的数值状态,使得发动机转速水平长时间保持相对稳定的数值状态,将外部压力对发动机运转能力的影响降到最低。软件部分以扩展状态观测器内部的微分跟踪器为出发点,选择了关键ESO参数,利用干扰补偿矢量,对扩展状态观测器进行频域参数配置,结合硬件实现基于扩展状态观测器的双闭环自适应调速系统设计。
1 自适应控制系统硬件设计
发动机转速双闭环自适应控制系统的硬件执行环境由双闭环集成电路、发动机控制器、自适应传感器、隔离驱动芯片、观测器驱动管五部分共同组成,自适应控制系统硬件整体结构示意图如图1所示。
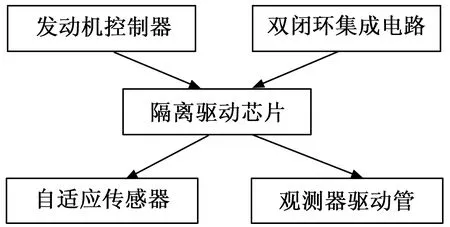
图1 自适应控制系统硬件结构
具体设计方法如下。
1.1 双闭环集成电路
发动机转速自适应控制系统的双闭环集成电路由动力源分路、集成分路、观测信号放大分路三部分共同组成。其中,动力源分路与外部接入电源直接相连,可在为发动机元件提供输入动力支持的同时,更改调控电阻已接入部分的阻值水平,且由于UPE主板元件的存在,电动机元件能够准确记录发动机结构转速的实时数值水平,一方面可以调节设备结构与外部气动压力之间的适配关系,另一方面也可做到对输入电量的最大化节约。集成分路中包含多个调控电阻,在实际应用过程中,这些设备结构元件始终保持串行连接关系[5-6]。与其他接入子回路不同,集成分路负责监控双闭环集成电路的主控应用结构,需要在准确显示传输电流数值的同时,调节气动电压对UPE主板的作用强度,从而使得发动机转速水平长时间保持相对稳定的数值状态。观测信号放大分路以电信号放大器作为核心应用元件,能够借助变阻器设备,缓解TG主机所面临的电量负载压力,从而最大化减轻外部压力对发动机运转能力的影响。双闭环集成电路结构图如图2所示。
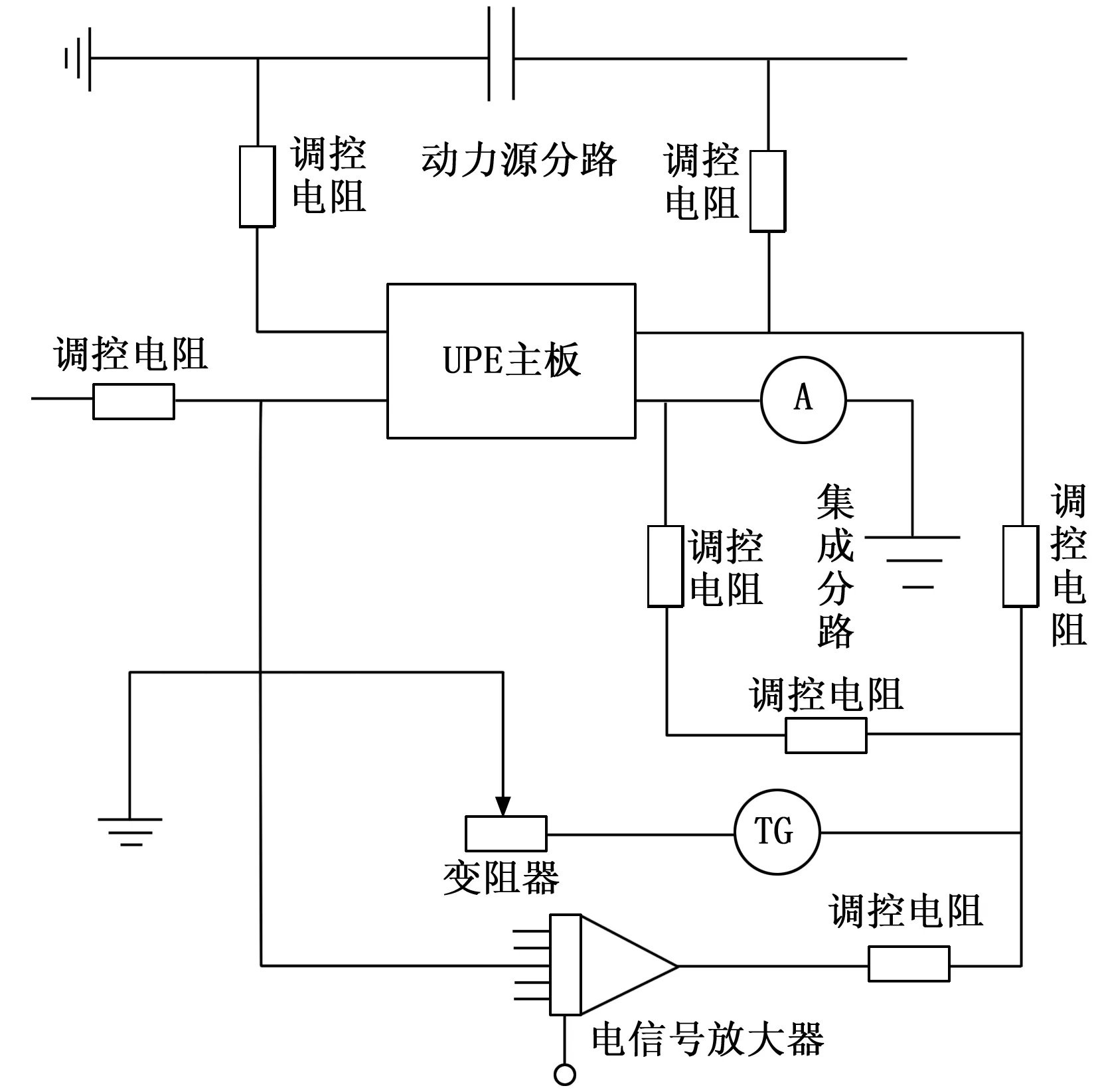
图2 双闭环集成电路结构图
为使双闭环集成电路的运行能力保持稳定,所有接入电阻的阻值水平都可以在500~750 Ω之间来回变化。
1.2 发动机控制器
发动机控制器是整个自适应控制系统的核心器件,连接双闭环集成电路与下级传感器设备,是以扩张状态观测器为逻辑中心的应用型调试结构[7]。本文采用发动机控制器型号为DSE7320,其基准电压为5.0 V,最佳点火提前角在上止点前10度左右,包含AMF+ATS+通讯+扩展+PLC逻辑功能。整个控制器结构中包含多个连接引脚,其具体连接及作用能力如下。
1)RAO引脚:与发动机振荡器结构相连,可通过调节转速频率的方式,更改双闭环集成电路内的电信号传输流量,从而使得发动机元件所承担的传输电压与电流长期保持稳定状态;
2)RE3与REF引脚:分别与自适应传感器和观测器驱动管结构相连,能够记录隔离驱动芯片内的压力作用情况,并将这些信息数据反馈至自适应控制主机中;
3)IN与OUT引脚:IN引脚负责接入双闭环集成电路中的传输电量,OUT引脚负责将这些电量再次分配至下级连接元件;
4)VSS与VDD引脚:VSS引脚具备较强的外设信号控制能力,可记录气动压力的实时作用水平,VDD引脚只能感知发动机控制器内的动力负载情况,在实际作用过程中,始终与VSS引脚保持定向连接关系[8];
5)RC1、RC2、RC3、RC4引脚:这些引脚只能保持同步接入关系,也只有在扩张状态观测器连入发动机设备的情况下,才能开启既定连接行为;
6)PGD、PGM、PGO引脚:负责记录扩张状态观测器的执行状态,并可根据发动机的实时转速水平,向自适应控制主机反馈关键的数据信息参量。
在发动机转速自适应控制系统中,控制器设备始终受到双闭环集成电路直属调度,这也是系统内传输电子量能够得到较好节约的主要原因。
1.3 自适应传感器
自适应传感器以SPI单片机作为核心搭建元件,可联合扩张状态观测器,对发动机设备的实时转速水平进行调节,由于PIC18F结构的存在,底层信号控制单元始终保持较强的感应灵活性,既能较好跟踪驱动芯片内电量信号的传输与消耗行为,也可以将已生成的感应电流暂存于放大器元件之中,为后续双闭环回路的形成提供电量支持[9-10]。通常情况下,自适应传感器总是与发动机控制器保持相同的连接行为,对于传输电子的促进性作用能力也完全相同。在双闭环集成电路的作用下,SPI单片机首先将转速控制信号传输至附属单片机结构中,当PIC18F结构感知到控制主机的调度需求后,附属单片机同时释放所有已存储的控制信号参量,从而使得传感器内部的电信号保持绝对稳定的存在状态,为隔离驱动芯片的接入提供保障[11-12]。自适应传感器示意图如图3所示。
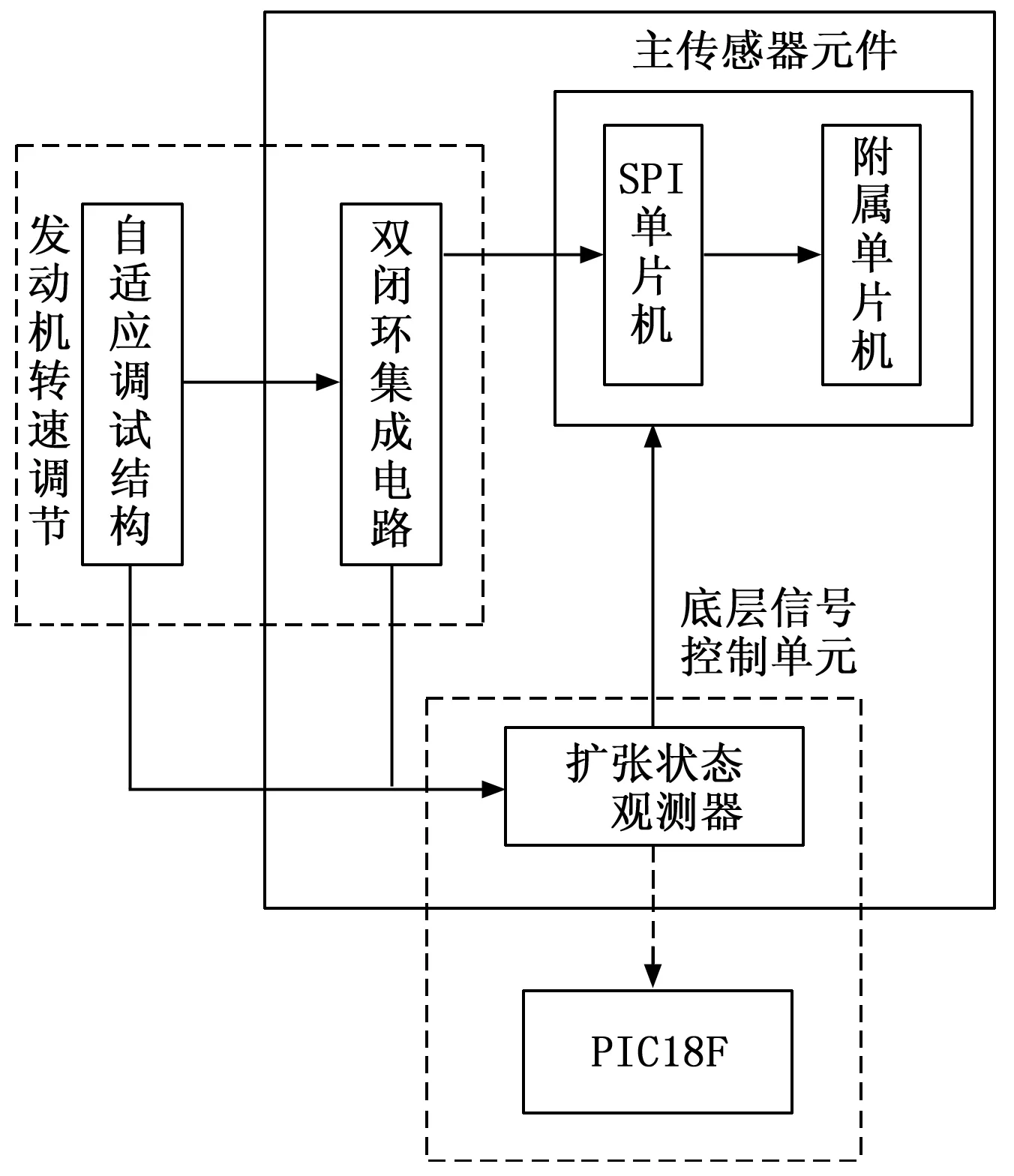
图3 自适应传感器示意图
分析图3所示的自适应传感器结构可知,主传感器元件只能对底层信号控制单元传输调节信号,而对于发动机转速调节结构发出的运行指令则不能进行任何的加工与处理。
1.4 隔离驱动芯片
在发动机转速双闭环自适应控制系统中,隔离驱动芯片负责将扩张状态观测器与控制器、传感器元件分离开来,使得双闭环集成电路能够对其进行分别供电,从而最大化保证发动机旋转运动空间的独立性与完整性。作为隔离驱动芯片的核心应用结构,MC33152板件同时调配压力感知主板、转速感知主板与压感电阻,从功能性角度来看,该结构的运行能力直接决定了发动机设备的实时转速水平,属于一种可控性连接元件[13]。压感电阻接入部分的阻值水平决定了隔离驱动芯片的作用能力,通常情况下,随着发动机转速水平的改变,电阻元件的接入电阻数值也会发生变化,单体上满足前者转速越快、后者阻值越大的规律。适配调试主板的连接等级较高,可更改压力感知主板与转速感知主板间的限制约束能力,但在实际应用过程中,其具体作用能力也是由驱动芯片内的MC33152板件决定的。
在实际应用过程中,隔离驱动芯片对于发动机转速的控制能力越强,MC33152板件对于传输电量信号的单位调度频率也就越快。
1.5 观测器驱动管
观测器驱动管负责对隔离驱动芯片进行调试,作为扩张状态观测器的下级附属结构,可管控发动机的实时转速水平,从而实现对双闭环控制回路的按需协调[14]。主弹簧集中分布在主气门结构上部,负责对衔接铁棒的连接紧密度进行调试,一方面能够避免发动机转动速度过快的情况出现,另一方面也可将主气门结构固定在既定连接位置处。主气门外同时套接两个铁芯与两个线圈,在发动机保持转动状态的情况下,由于两者之间存在一定的转速差,所以衔接铁棒的连接位置总是来回变动,这也是扩张状态观测器作用能力并不能保持完全稳定状态的主要原因[15]。具体结构如图4所示。
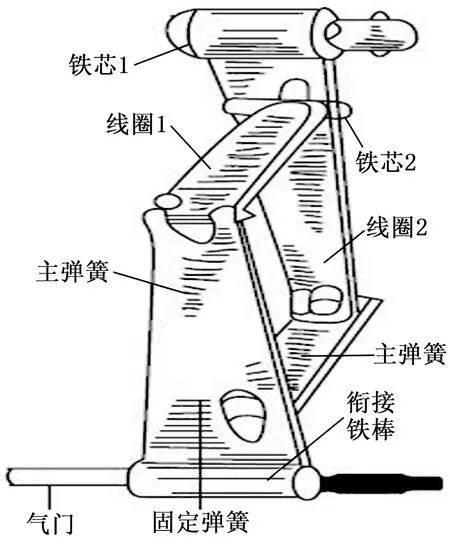
图4 观测器驱动管示意图
固定弹簧存在于主弹簧下部,仅负责调节气门结构的连接紧密程度,不对发动机转速起到直接影响。
2 扩张状态观测器的频域参数配置
2.1 扩张状态观测器结构分析
扩张状态观测器主控元件放置于底部支撑框架之上,在传输通路保持非闭合状态的情况下,扩张片元件的横截面积持续增大,直至观测器结构可以显示出主控元件所捕获到的所有发动机转动影像。在实际观测过程中,边框结构始终保持绝对稳定的连接状态,随着扩张片结构的不断运动,传输通路的存在状态也在不断改变,此时为使观测器的连接行为趋于稳定,应控制结构体在竖直方向上的运动幅度,一方面使得扩张状态观测器能够准确监视发动机的实时转速水平,另一方面也可以辅助双闭环集成电路对自适应电感信号进行按需捕获与处理[16]。一般情况下,扩张状态观测器底部支架及外部边框所处位置不会随发动机转速的改变而发生变化。
2.2 微分跟踪器
微分跟踪器能够监管扩张状态观测器的连接行为,能够根据自适应前馈模型,分析当前情况下发动机元件的实时转速水平,并可将已获取信息反馈至发动机控制器结构中,以便于系统双闭环集成电路的直接调取与利用[17]。
设w0表示自适应电控信号的原始输出参量,χ表示发动机元件的转速参量,ΔT表示单位转动周期,联立上述物理量,可将微分跟踪器对于扩张状态观测器的约束性行为标准表示为:
(1)

根据微分跟踪器约束原则,核心控制主机可确定扩张状态观测器的实时行为状态,并可以此为基础,完成对发动机转速水平的按需调节。
2.3 ESO参数选取
在发动机转速双闭环自适应控制系统中,ESO参数能够决定扩张状态观测器中电感信号的最大输出量,若默认自适应传输行为的存在,则可认为ESO参数取值结果越大,扩张状态观测器中电感信号的单位输出量越大[18-19]。在选取控制指标时,ESO参数的取值受到双闭环集成电路波动系数、观测信号数值标量两项物理指标的直接影响。对于发动机转速双闭环自适应控制系统而言,集成电路波动系数可表示为ξ,作为一项矢量指标,该参量的数值水平不会随着系统运行时间的延长而出现变化。观测信号数值标量可表示为α,在考虑微分跟踪器约束原则的前提下,该项指标的取值结果始终处于(1,e)的物理区间之内。在上述物理量的支持下,联立公式(1),可将ESO参数选取条件定义为:
(2)

2.4 扰动补偿向量

(3)
在发动机转速双闭环自适应控制系统中,扰动补偿向量计算值越大,表示扩张状态观测器当前所处工作状态越稳定,因此为实现对发动机转速的准确监控,应尽可能避免ESO参数取值结果对扰动补偿向量的影响,使其计算实值不断趋近理想化最大值。
3 实例分析
以图5所示发动机元件作为实验对象,同时打开进气口、进气门与排气口,使发动机设备进入正常工作状态,在确保链条进入匀速转动状态后,将曲轴与测速装置相连,不断调节火花塞的打火频率,使得发动机转速与外接飞轮转速保持一致。
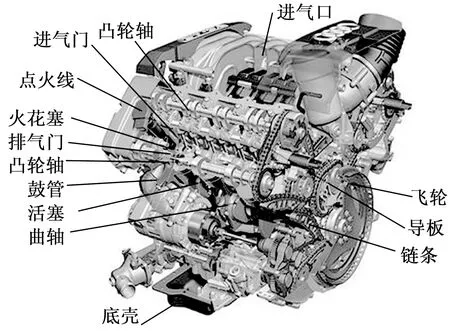
图5 实验用发动机设备
在实验过程中,由于火花塞存在打火行为,所以直接计数发动机转速存在一定的危险性,而外接飞轮转速始终与发动机转速相等,故而可用前者代替后者。
首先,应用基于扩张状态观测器的作用程序对计数器装置进行控制,将所得转速值作为实验组变量;其次,应用基于非谐波傅里叶变换的作用程序对计数器装置进行控制,将所得转速值作为对照组变量;然后,控制进气口打开程度,人为制造不同的气动压力环境;最后,分析实验组、对照组发动机转速在不同压力环境下的数值水平,将其与理想数值对比。实验随机参数为0.5 MPa、0.8 MPa、1.3 MPa三种不同的压力环境,3、6、9、12、15、18 s的取样时间,实验中所用参数为飞轮转速及气动压力取值。
图6记录了外接飞轮转速在3种不同压力环境下的具体数值情况。
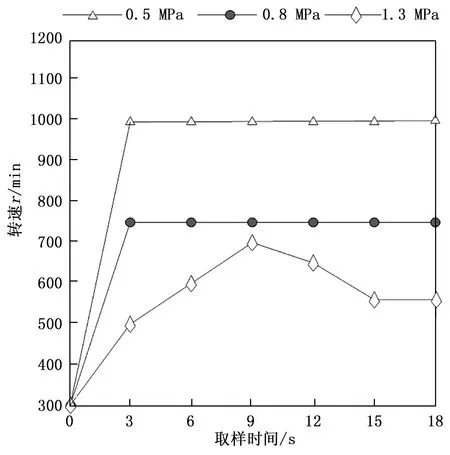
图6 外接飞轮转速的理想数值
分析图6可知,在0.5 MPa的压力环境,外接飞轮转速始终保持绝对稳定的数值存在状态,外接飞轮转速理想数值为1000 r/min,;在0.8 MPa的压力环境,外接飞轮转速理想数值为750 r/min,能保持绝对稳定的数值存在状态,但相较于0.5 MPa的压力环境,其均值水平下降了250 r/min;在1.3 MPa的压力环境,外接飞轮转速理想数值呈现出先上升、再下降、最后趋于稳定的数值变化趋势,其最大取值结果达到700 r/min,最小为500 r/min,与0.8 MPa压力环境下的平均值相比,下降了50 r/min,除“0”取样节点外,其全局最小值为553 r/min,与其全局最大值相比,下降了147 r/min。
表1记录了实验组、对照组外接飞轮转速在0.5 MPa、0.8 MPa、1.3 MPa三种不同压力环境下的数值变化情况。
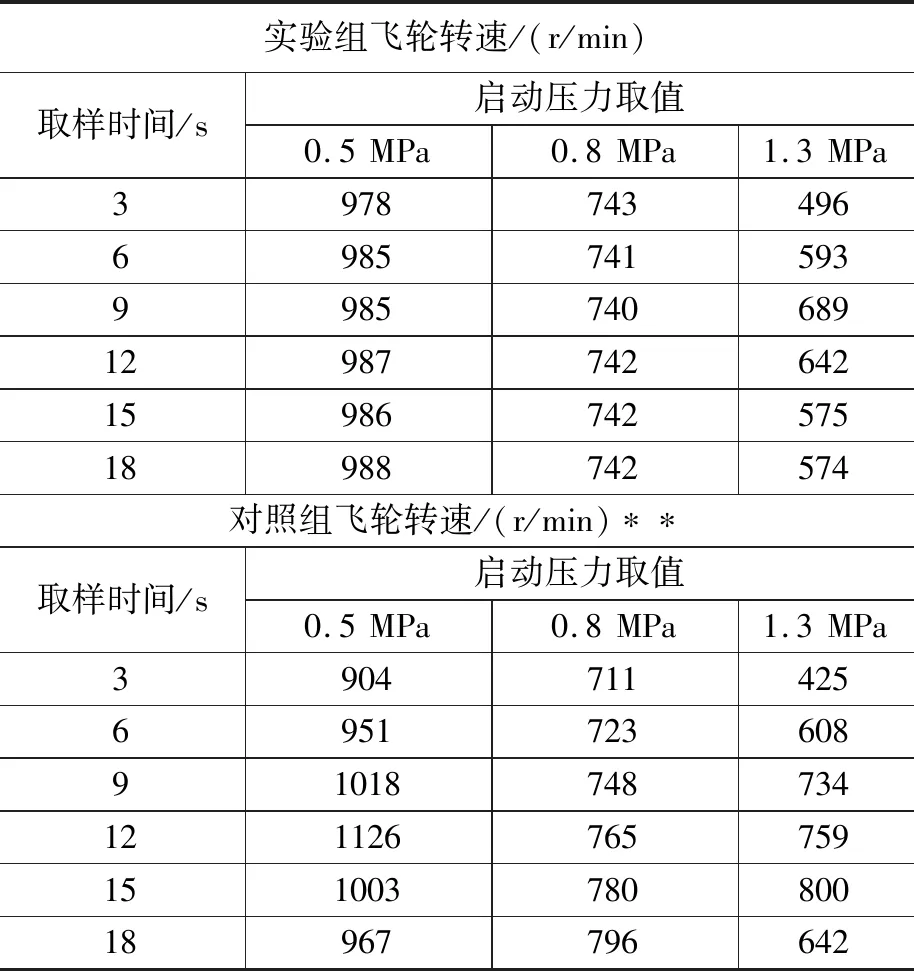
表1 外接飞轮转速的实验数值
分析实验组飞轮转速水平可知,在0.5 MPa的压力环境,除第3 s的取样节点外,外接飞轮转速始终保持相对稳定的数值变化状态,其最大值与理想均值相比,下降了12 r/min;在0.8 MPa的压力环境,外接飞轮转速数值经过短时间的波动状态后,开始趋于完全稳定的形式,其稳定数值与理想均值相比,下降了8 r/min;在1.3 MPa的压力环境,外接飞轮转速的变化形式也与理想转速值变化趋势保持一致,其最大值结果始终没有超过理想转速的最大值。
分析对照组飞轮转速水平可知,在0.5 MPa的压力环境,外接飞轮转速值呈现先上升、再下降的变化趋势,且其最大值达到了1 126 r/min,超过了理想转速值;在0.8 MPa的压力环境,外接飞轮转速呈现持续上升的变化形式,至实验结束,其最大值达到了796 r/min,也超过了理想转速值;在1.3 MPa的压力环境,外接飞轮转速值经过持续上升状态后,开始大幅下降,其最大值达到了800 r/min,超过了理想转速值。
综上可知:
1)应用实验组系统,外接飞轮转速在3种不同压力环境下的数值水平始终低于理想转速值,且其数值变化趋势始终与理想转速曲线一致;
2)应用对照组系统,外接飞轮转速在3种不同压力环境下的数值水平均不能与理想转速曲线保持一致,且其数值变化规律极不稳定;
3)实验组系统能够较好控制外接飞轮转速,使其在不同压力水平下均呈现出理想化的工作状态,即应用基于扩张状态观测器的双闭环自适应控制系统,更有利于调节发动机转速水平,使其长时间保持相对稳定的工作状态。
4 结束语
在扩张状态观测器的作用下,发动机转速控制系统从双闭环集成电路入手,构造完整的硬件应用环境,借助发动机控制器、自适应传感器等设备结构,在选取ESO参数的同时,对扰动补偿向量指标进行准确计算。与非谐波傅里叶变换测量系统相比,扩张状态观测器作用下的控制系统,能够保证发动机转速始终维持在合理的低水平状态,对于促进发动机元件的稳定工作,具有较强的促进性影响作用。
猜你喜欢
微电机(2022年8期)2022-10-12
当代水产(2022年7期)2022-09-20
火力与指挥控制(2022年6期)2022-07-25
汽车实用技术(2022年13期)2022-07-19
纺织服装周刊(2022年16期)2022-05-11
计算机与数字工程(2022年4期)2022-05-10
物流科技(2022年2期)2022-05-07
北京青年周刊(2020年33期)2020-08-28
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15