医用辅助倒立—定位夹紧病床的设计
2022-08-02 07:38:24汪亦寒刘明阁杨兴进刘李林
机电信息 2022年14期
汪亦寒 刘明阁 杨兴进 刘李林 王 远
(1.西南林业大学机械与交通学院,云南 昆明 650224;2.云南建投机械制造安装工程有限公司,云南 昆明 650120)
0 引言
医用床是能承载患者,协助患者调整体位,促进患者康复,方便理疗人员实现治疗操作过程的一种设备,主要在各大医院、社区服务中心、私人理疗会所等使用。
目前市场上的医用床主要分为手动医用床、电动医用床和床板三大类,也存在一些兼具特殊功能的医用床,如家居理疗床、烫伤床、带便盆医用床和超低三功能电动床等。但目前市面上的医用床或护理床都是以协助病患起身、平躺为主要功能展开的研发,如可分离的多功能助老床、联动式护理床和模块化多功能护理床,都没有协助患者倒立、定位、夹紧固定等功能。
已有研究表明,倒立能协助某些医疗过程取得理想的临床治疗效果。如:广西来宾市武宣县中医院采取半倒立俯卧位,ESWL治疗后尿道结石,可让冲击波自耻骨联合上经充盈的膀胱斜射向膀胱颈至后尿道,聚焦于结石上,以中等冲击功率即可碎石,并且定位准确,移动方便,比原位ESWL治疗后尿道结石取得的临床效果更加令人满意。福建省泉州市光前医院对单纯性肾下盏结石患者应用体外碎石后,辅助倒立体位排石,可明显提高结石排净率,且简便易行。
可见,采用倒立体位协助某些理疗或医疗过程可取得有益效果。但病患或理疗者倒立后难以自行控制与维持身体平衡,理疗或医疗过程中,必须有辅助医用设备才能长时间维持倒立状态,因而亟需研发具有夹紧、定位功能的倒立式医用床,以在一定程度上解决这一难题。
1 总体结构与工作原理
1.1 总体结构
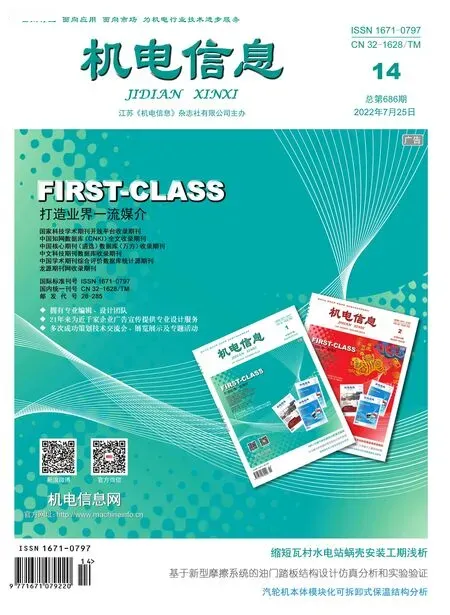
本设计的医用辅助倒立病床主要由床板2、推杆电机9和床架1等组成,总体结构示意图如图1所示。其中床架1主要由交叉式电机支撑杆11、床板支撑框10、4根立腿12和4个万向轮8等组成,推杆电机9一端连接在交叉式电机支撑杆11上,另一端支撑在床板2上。左/右侧护板7/3、左/右护肩5/4安装在床板2上,构成床框。床架1与床框采用铰链6连接形成转动副,以使床框可绕床架1一端在一定角度范围内翻转。左/右护肩5/4及左/右侧护板7/3采用丝杆传动机构,由电机带动可实现上下升降。床板上可以附设安全带,以进一步协助固定医疗过程中的患者。
该医用辅助倒立病床在床框未翻转状态下的长、宽、高分别为1 800 mm、800 mm和640 mm,可供身高低于1 900 mm、体重小于110 kg的患者使用,能满足绝大部分患者需求。
1.2 工作原理
图1所示位置为患者平躺,床框处于一定角度的翻转状态。
使用前,床框位于水平位置,左/右侧护板7/3、左/右护肩5/4位于床板2之下。
使用时,先让患者按照所需体侧位躺于床板2上。
当患者需要倒立、仰卧平躺体位时,让患者仰卧平躺于床板2左右侧的居中位置后,先升起左/右护肩5/4,让患者肩部抵靠在护肩上,再升起左/右侧护板7/3,之后使护板横向移动,直至抵靠在人腰部附近的两侧。左/右护肩5/4、左/右侧护板7/3移动到位,系上附加安全带后,开启推杆电机9,驱动床框绕铰链轴翻转至医疗过程所需角度,患者此时便处于一定角度的倒立状态,以协助需倒立辅助治疗的过程。
倒立、平卧位治疗结束后,反向开启推杆电机9,使床框绕铰链轴反向翻转,放平床框,再下降左/右护肩5/4、左/右侧护板7/3与床板平齐,卸下附加安全带,此时患者便可离开医用床,结束平躺、倒立体位的治疗过程。
当患者需要处于倒立、右侧卧位时,让患者右侧卧于床板2上,单边升起右护肩4、右侧护板3,使患者侧躺时的下肩抵靠在右护肩4上,后背抵靠在右侧护板3上,系上附加安全带后,开启推杆电机9,驱使床框绕铰链轴翻转至治疗过程所需角度,患者此时便位于一定的倒立角度、右侧卧体位,待治疗过程结束后,反向开启推杆电机9,放平床框,下降右护肩4和右侧护板3与床板2平齐,卸下安全带,此时患者便可离开医用床。
患者需要倒立、俯卧平躺时的操作流程与倒立、仰卧平躺时相同。需要倒立、左侧卧位时与倒立、右侧卧时相似,只需单边升降左护肩和左侧护板即可。
2 医用辅助倒立病床主要部件的设计
2.1 护肩机构
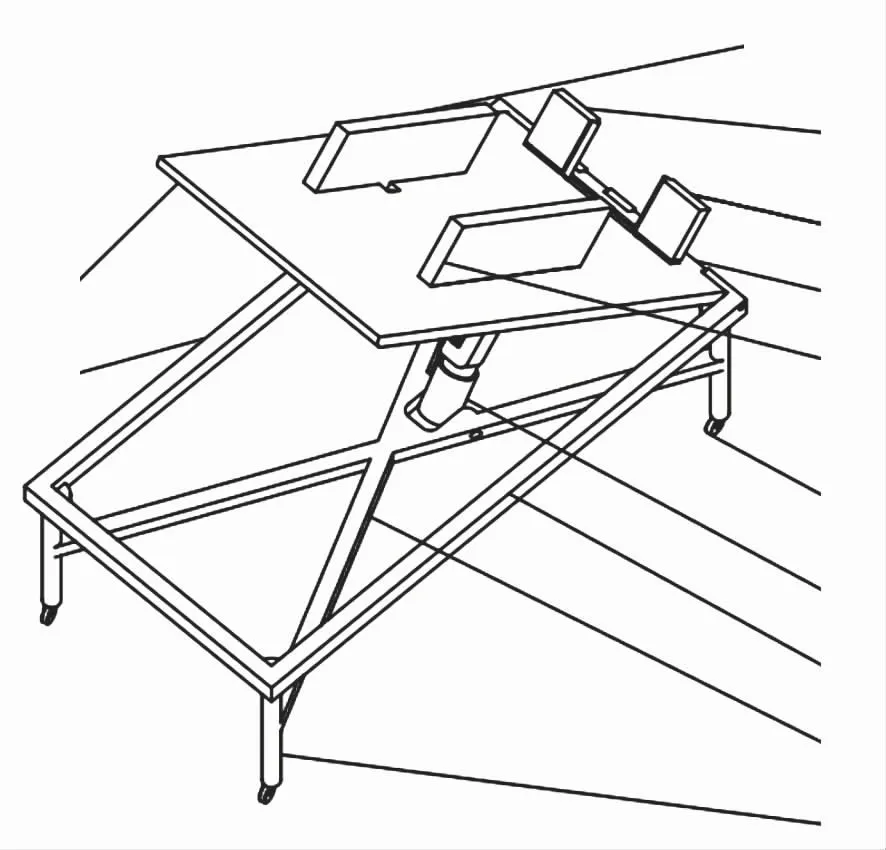
两个护肩采用丝杆传动机构控制其升降,丝杆机构采用直流电机驱动。丝杆采用梯形螺纹传动螺杆1,螺距2 mm,螺纹外径16 mm,设置移动距离100 mm,护肩3安装在移动导槽2中,其结构示意图如图2所示。

护肩3外形长120 mm、高120 mm、厚30 mm,其内加工与传动螺杆相旋合的内螺纹孔。直流电机采用联轴器安装在传动螺杆1下端,并固定在床框上的专用安装板上。
工作时,直流电机驱动丝杆转动时,护肩3只能在移动导槽2内做升降运动。护肩升起支撑肩部时,升起高度超出床板平面90 mm,此高度低于单侧肩膀宽度与厚度,即患者处于平躺、侧卧位时,均能达到护肩并支撑患者的效果,保证患者处在倒立位置时不会沿着床板面下滑,起到了定位与固定的作用。护肩的升降通过控制直流电机的正反转来实现,同时设置限位开关,达到限位预定升降高度后,限位开关发出信号,控制电机停止工作,从而确保在工作过程中护肩能处在所需的位置。
2.2 护板机构
护板的升降与左/右移动传动原理如图3所示,该传动机构由垂直相交的两组丝杆传动机构组成,丝杆传动采用与护肩传动机构相同规格的梯形螺旋传动机构。护板外形长300 mm、高120 mm、厚30 mm,长度两端设计为半圆柱形,顶端棱边倒圆,以免使用过程中划伤患者。
护板1内加工与升降螺杆3相旋合的螺纹,升降螺杆3的另一端采用联轴器与直流电机连接,滑块4与升降螺杆3之间形成间隙滑动配合,同时也起着支撑升降螺杆3的作用。滑块4与水平移动螺杆5形成丝杆传动机构,滑块4与水平移动导槽6形成间隙滑动配合,水平移动螺杆5的另一端采用联轴器与直流电机连接。两直流电机都固定在各自的专用安装板上。
工作时,先开启升降螺杆3直流电机,驱动其转动,把护板1升到预定高度后,再开启水平移动螺杆5直流电机,驱动其转动,推动滑块4在水平移动导槽内移动,从而把护板1推动到预定位置。护板1上安装上下、左右位置限位开关,当护板1运动到与身体接触时,位置开关发出一个信号,切断直流电机电源,使两侧护板以预设压紧力紧靠在患者身体两侧,达到定位、夹紧作用,保证患者在整个倒立辅助医疗过程中不会发生身体侧翻等意外。
2.3 主推杆电机的安装与选取
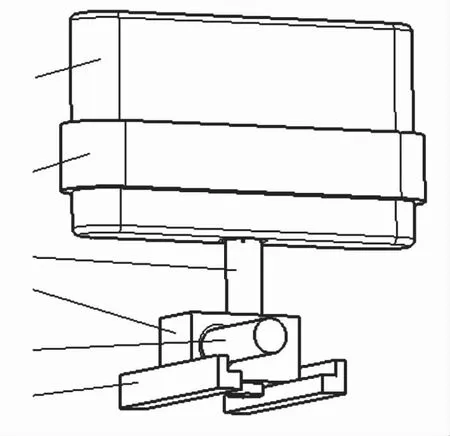
主推杆电机指推起床框绕铰链转轴翻转一定角度的电机,参照陈磊等人的多功能护理床主推杆电机的安装设计要求,其安装尺寸如图4所示,床框翻转一定角度θ时的位置为图中双点划线所示,图4中点O代表床框与床架铰链连接的转动副,点A、B分别代表主推杆电机底端与床架、顶端与床框铰链连接的转动副。设计中翻转角θ设定在0°~50°,此角度范围能满足绝大多数需倒立辅助医疗过程的需要。

当转角为θ时进行受力分析,由余弦定理有:
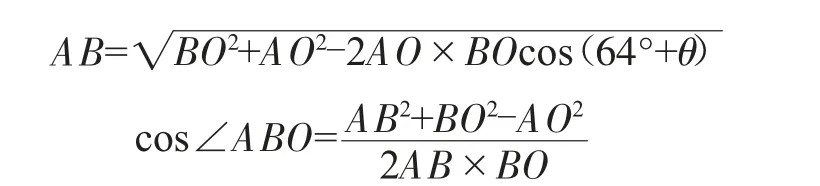
由正弦与余弦关系可得:

受力分析时,忽略各转动副摩擦和主电机推杆自身的质量,可把工作过程中主电机推杆AB视作二力杆。同时,床框与患者对转轴O的合力作用点取距点O为300 mm处,并对点O取矩,可得电机推力F和力G之间的关系:
300G×cos θ=500F×sin∠ABO
代入数据可得:

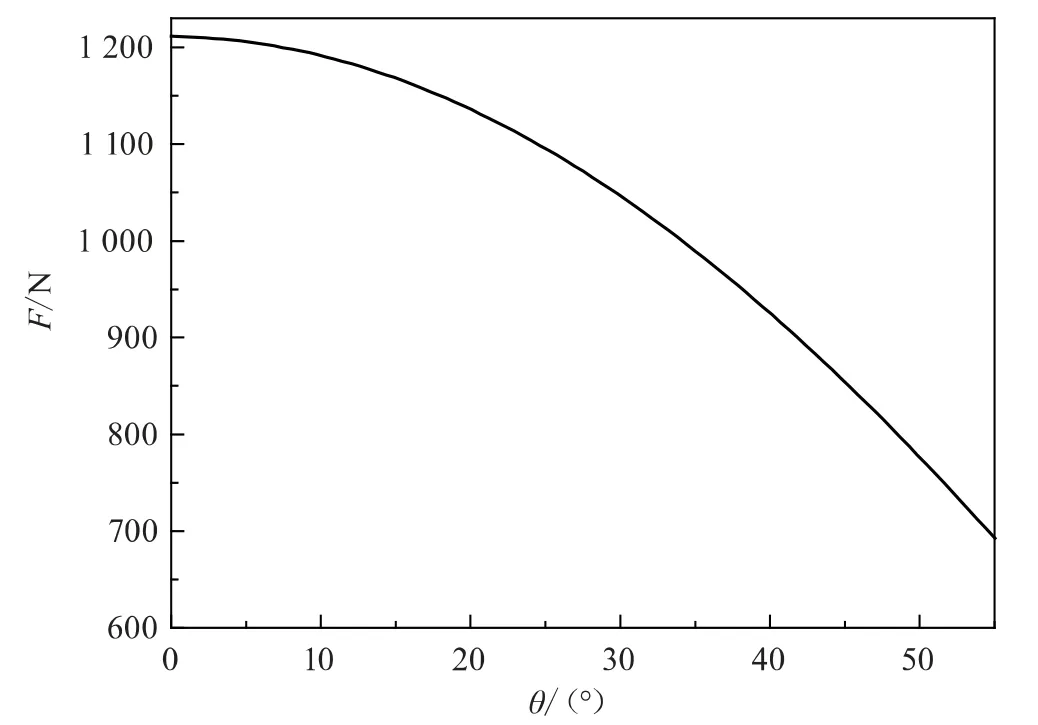
考虑现实中大部分患者体重小于110 kg,设计中床板、护肩与护板等总重小于40 kg,取重力加速度为10 N/kg。在Matlab软件中对算式(1)求值,得到主电机推杆受力F与转角θ的关系曲线如图5所示,随着转角θ在0°~50°范围内增大,力F减小,转角θ=0°时,最大值约为1 212 N。取安全系数1.5,得主电机推杆推力应大于1 818 N。故选取推力为2 000 N、速度为5 mm/s、电压24 V的直流推杆电机。依据安装要求和最大转角θ=50°计算,推杆行程应大于326 mm,取行程335 mm。推杆电机行程大于300 mm时,其安装尺寸一般为行程距离加210 mm,故此设计的最小安装长度为545 mm,小于设计初始安装长度560 mm,可以进行安装,设计合理。
3 结语
该医用辅助倒立病床设计可协助患者处于不同体位、以一定角度倒立,并固定患者,使患者在整个需倒立辅助治疗的过程中不会发生体位改变与下滑,能保证患者在全治疗过程中的安全。希望本设计能为相关领域的设计提供一定的技术借鉴与参考。
猜你喜欢
山西冶金(2022年3期)2022-08-03 08:39:42
汽车实用技术(2022年11期)2022-06-20 02:22:44
中国应急管理科学(2022年1期)2022-04-18 21:13:12
铁道建筑(2019年12期)2020-01-02 05:53:18
设备管理与维修(2018年15期)2018-11-08 06:14:50
设备管理与维修(2018年8期)2018-08-13 12:09:14
中国核电(2017年1期)2017-05-17 06:10:00
机械工程师(2015年10期)2015-02-02 01:14:34
汽车零部件(2014年5期)2014-11-11 12:24:32
铁道建筑(2011年10期)2011-07-27 07:05:28