
基于无线数据的高精度超宽带定位方法综述
2022-08-01 04:16李英明任升莲陈义华刘建敏李加好
测控技术 2022年7期
李英明, 任升莲, 陈义华, 刘建敏, 张 妍, 李加好
(合肥工业大学 资源与环境工程学院,安徽 合肥 230009)
近年来,随着大数据信息时代的发展,各种各样的“智慧+”理念层出不穷,如智慧社区、智慧停车场等,它们的运行和服务需要建立在精确的室内导航基础上。因此高精度的室内定位技术越来越受到重视,其定位的精度要求也越来越高。高精度的室内定位技术是以超宽带(Ultra Wideband,UWB)、WiFi、蓝牙等无线定位信号为基础,辅以其他融合算法、追踪技术的综合技术,如紫峰(ZigBee)技术结合最小二乘法[1]、蓝牙技术结合数据库算法[2]等。而在这些无线信号之中,UWB技术由于其自身数据传输速率高、功耗小、能效高、穿透力强和精度高等特点,在高精度应用领域(如智慧养老[3]、矿井人员精确定位[4-5]等)具有明显的优越性,且UWB技术可结合Chan算法[6]、神经网络算法[7-8]、Taylor算法[9]、卡尔曼滤波算法[10-11]、惯导算法[12]等进一步提高定位精度,是目前高精度室内定位系统应用最广泛的技术之一。但在该领域大多数学者将研究重心放在了算法优化和其他具体应用上,对于UWB定位技术的方法和相关的硬件设施的总结性叙述较少,因此本文根据国内外文献和最新产品性能指标,从目前主要应用的室内定位技术、基于UWB技术的室内定位方法和优化算法以及目前国内外市场上较为成熟的UWB硬件设施及相应平台软件3个角度对基于无线数据的高精度UWB室内定位技术进行了综合论述,探讨未来UWB室内定位方法和定位技术在高精度室内定位系统中的发展方向,并发表了自己的见解。
1 室内定位技术分析
随着智能化社会的到来,各个领域的“智慧+”理念逐渐兴起。如 “智慧养老”是指借助物联网、可穿戴技术与移动技术等为老人提供实时、高效、智能的养老服务,而在这些理念之中高精度的室内定位数据是关键内容之一,没有位置就没有状态,自然就没有了服务。因此,以UWB、WiFi、蓝牙等无线定位信号为基础的高精度室内定位技术成为室内定位系统的主流技术方案。
1.1 无线连接定位
WiFi是通过IEEE802.11b协议把具有相应模块功能的智能手机等终端连接起来组网的技术手段,是目前组建无线局域网的热门技术,特点为覆盖范围广、功耗高、成本低。WiFi技术的室内定位方法主要分为2种:一种是基于无线测距的室内定位算法;另外一种是基于接收信号强度指示(Received Signal Strength Indication,RSSI)指纹的室内定位算法。
基于无线测距的室内定位,由于建筑物内部的环境可能会引起信号衰减,信号会有一定的波动,从而使室内定位的精确度有所下降;基于RSSI指纹定位,需要前期不断采集数据,构建精确的指纹数据库,后将定位数据与优化后的数据库进行匹配得到定位结果[13]。相较而言,位置指纹RSSI定位的准确度较高一些。Zhang等[14]提出了一种基于WiFi和改进的行人航位推算(Pedestrian Dead Reckoning,PDR)的多信息融合室内定位算法,并将融合算法的结果运用扩展卡尔曼滤波算法进行处理。实验结果表明,与WiFi或PDR单个算法定位相比,该算法具有更高的精度和更好的稳定性,其平均定位误差为0.57 m。
WiFi定位方法的优势是:应用普及、速度快、应用范围广泛、成本低;劣势是:功耗高,需要线下采集WiFi信息构建指纹库,且数据需要长期维护,定位精度偏低等。
1.2 蓝牙定位
蓝牙定位是基于GPS信号的无线定位技术,它将接收的GPS数据处理后通过蓝牙发送到手机、掌上电脑 (Personal Digital Assistant,PDA)、电脑等设备终端中,以辅助用户定位。蓝牙常和WiFi结合用于室内定位,常用的定位方法包括指纹定位法、近邻探测法和质心法[15]。
蓝牙定位在实际应用中通过改进算法可以在一定程度上提高精度,Wu等[16]为了解决矿井环境的不确定性和其他干扰因素引起的蓝牙定位精度降低的问题,提出了一种基于蓝牙定位信息的改进的RSSI校正定位算法。以廊道式矿井为实验环境,实验数据验证了该方法能有效减小测距误差,最小定位误差为0.11 m,与一般加权三角质心定位法相比,其平均误差较低,误差减少约27%。
蓝牙定位方法的优势是:部署成本低、安全性高,覆盖范围1~50 m,功耗小、成本低;劣势是:对于复杂的空间环境,蓝牙定位系统的信号稳定性稍差,受噪声信号干扰较大。
1.3 红外线定位
红外定位主要有2种技术实现方法:一种是将定位对象附上一个会发射红外线的电子标签,通过室内安放的多个红外传感器测量信号源的距离或角度,从而计算出定位对象所在的位置,这种方法在空旷的室内容易实现较高精度,可实现对红外辐射源的被动定位;另一种方法是红外织网,即通过多组发射器和接收器织成的红外线网覆盖待测空间,直接对运动目标进行定位。红外线定位在空旷地区的覆盖范围在15 m左右,但是很容易被障碍物遮挡,传输距离也不长,因此需要大量密集部署传感器,造成较高的硬件和施工成本。
Yuan等[17]针对被动二元热释电红外传感器跟踪系统,提出了一种基于改进信用和动态剪枝算法的室内人体定位设计。利用小型灵活的精密红外辐射计(Precision Infrared Radiometer,PIR)传感器系统对改进的定位算法在多人跟踪中的应用中进行了测试。仿真和实验结果表明,该算法效果良好,单目标的平均定位误差为0.37 m,多目标的最小平均定位误差为0.48 m。
红外线定位方法的优势是:在空旷的室内容易实现较高精度,不需要定位对象携带任何终端或标签,隐蔽性强;劣势是:容易被障碍物遮挡,传输距离短,需要大量部署传感器,成本非常高。此外红外易受热源、灯光等干扰,造成定位精度和准确度下降。
1.4 射频识别技术
射频识别(Radio Frequency Identification,RFID)技术,又称无线射频识别,是一种通信技术,俗称电子标签,其利用射频方式进行非接触式双向通信。
Liu等[18]提出一种基于萤火虫群优化(Glowworm Swarm Optimization,GSO)与半监督在线顺序极限学习机(Semi-supervised Online Sequential-Extreme Learning Machine,SOS-ELM)融合的RFID定位算法,称为GSOS-ELM算法。该算法通过GSO算法自动调整SOS-ELM算法的正则化权重,从而可以在不同的初始条件下快速获得最佳正则化权重,实验结果证明其具有更高的精度,静态平均定位误差为0.4302 m,动态平均定位误差为0.4851 m。
RFID定位方法的优势是:可以在几ms内得到厘米级定位精度的信息,且传输范围大,成本、功耗较低;劣势是:较易受到多径效应、衍射的影响而降低精度,适用距离短,传播模型建立难度较大[19],存在用户隐私保护安全隐患[15]。
1.5 超声波定位
超声波自动定位仪是利用超声波的空间传播特性,来确定目标的具体位置。将超声波发生器置于被定位的目标上,该发生器向周围按照一定的时间间隔发送超声波脉冲,在周围3个固定位置上分别接收超声波发射装置发出来的脉冲信号,由于超声波在空间传送速度相对较慢,所以通过比较3个接收装置收到信号的时间,可以反演出超声波发生器的具体位置,也就是被定位目标的位置,当目标移动的时候,可以通过不间断测量,得到目标的运动轨迹。
目前超声波定位技术的指标有定位精度、响应速度、定位范围等。大多数定位误差在10 cm之内,定位距离最远可达210 m。Zhang等[20]提出了一种多自由度(Multi-Degree of Freedom)超声定位系统,可以有效地从移动的AGV的超声波发射装置接收所有信号。该方法的平均定位误差为3.2 cm,极大地提高了测量精度。
超声波定位方法的优势是:定位精度较高,可达到厘米级,且结构简单;劣势是:超声波受多径效应和非视距传播影响很大,且超声波频率易受多普勒效应和温度影响从而降低定位精度,同时也需要大量基础硬件设施,成本极高。
1.6 ZigBee定位
ZigBee技术是一种近距离、低复杂度、低功耗、低速率、低成本的双向无线通信技术。主要用于距离短、功耗低且传输速率不高的各种电子设备之间的数据传输以及典型的有周期性数据、间歇性数据和低反应时间数据传输的应用。常用的定位方法包括近邻探测法、质心定位法等。该技术有效覆盖范围在100 m以内,其功耗和成本较低,精度一般为3~5 m。
Dong等[21]提出了一种基于RSSI的无线ZigBee传感器网络。模块CC2431用作设计ZigBee节点的核心芯片,这些ZigBee节点用于形成ZigBee定位网络。现场测试实验表明,该方法可用于较低定位精度要求的情况,不需要额外的硬件和软件,并且易于实现,定位误差一般为3~5 m。
ZigBee定位方法的优势是:低功耗,对存储和计算能力的要求较低,延时短,网络容量大,数据安全;劣势是:硬件成本高,通信稳定性容易受到影响,应用场景受限。
1.7 其他技术及对比汇总
基于无线信号交汇定位技术除了上述定位技术以外,还有地磁场定位、惯性传感器定位、LED可见光定位、计算机视觉定位等技术。地磁场定位方法不需要借助其他器械,算法简单易实现,有自我纠偏的功能,误差不会累计;但事先要采集数据建立磁场分布图,刚开始定位时,若地图较大,需要花较长时间来匹配地图,匹配时间较长,有一定概率匹配失败(依赖于算法的效率和复杂度),而且磁场也会受到大型移动铁块(车辆)的干扰。惯性传感器定位方法不依赖任何外部信息,抗噪性强、数据更新快、稳定性好;但由于导航信息经过积累产生,定位误差随时间而增大,长期精度低,每次使用之前需初始校准,设备性能依赖性强。LED可见光定位方法动态范围大,能够实现较高速率的通信;但图像处理耗时较长,实时性较差。上述室内定位技术性能对比如表1所示。
表1对上述室内定位技术的定位精度、覆盖范围、技术实现场景以及是否需要专有设备等优缺点进行了对比与汇总。经过多方面因素数据的比较,用户可根据其应用方向做初步的定位方案选择,如WiFi定位、蓝牙定位由于自身成本低、安装便利等特点适合用于精度要求不高的室内定位环境;而UWB技术具有穿透力强、抗多径效果好、安全性高、定位精度高等特点,更适用于本文提出的高精度室内定位系统的构建,以下对UWB技术进行梳理和总结。
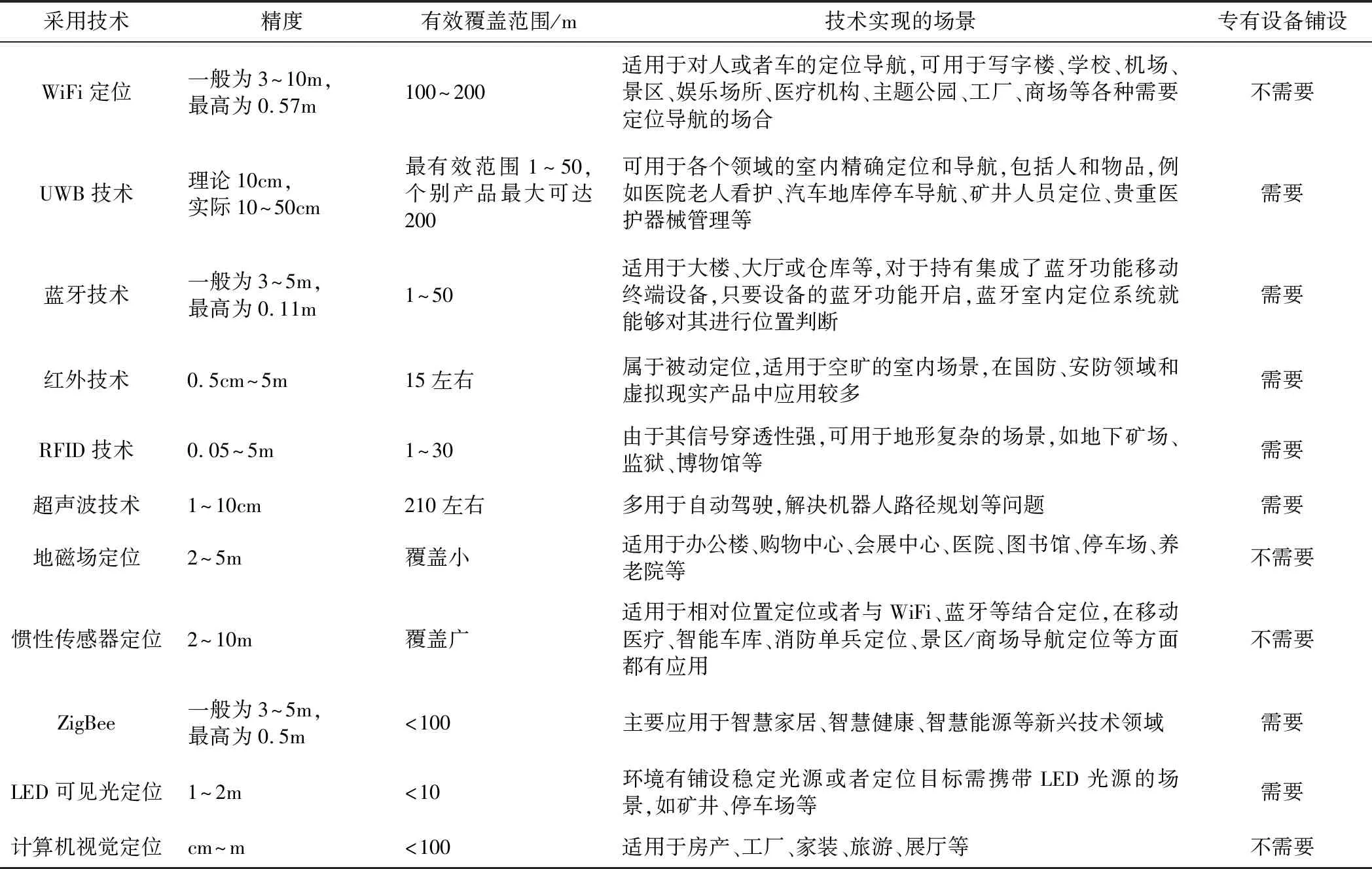
表1 室内定位技术性能对比
2 UWB室内定位方法
UWB技术是一种无载波通信技术,利用ns~μs级的非正弦波超窄脉冲传输数据,扩大通信带宽。其主要应用方法有信号到达时间法、信号到达时间差法、信号到达角度法、信号接收强度法、指纹定位方法等。
2.1 信号到达时间法
这是目前基于UWB的室内定位方法中最为常用的方法,信号到达时间法(Time of Arrival,TOA) 定位原理简单且定位精度高,其核心在于测量节点间信号的飞行时间,而UWB模块所发射的信号为脉冲电磁波,其速度为光速,因此只要保证两个节点间的时间显示器同步,根据信号传送的时间便可得到两个节点之间的距离。但要求发送端和接收端必须保持精准的时钟同步,这对硬件要求相当高。实际应用中基本上都是数据通过基站发送给标签,由标签返回数据给基站,基站记录收发数据的时间差,时间差乘光速除以2,得到当前基站到标签的距离。即
(1)
式中:d为测算的距离;ttra为信号在传输过程中所用的时间;c为光速;ttot为信号从发射到接收的总时间;tpro为基站处理信号的时间(由于硬件设施自身性能的影响,可能某些基站处理信号所需的时间不能忽略)。
一般情况下,一对一测距可分为两种形式:单边双向测距(Single-Sided Two-Way Ranging,SS-TWR)和双边双向测距(Double-Sided Two-Way Ranging,DS-TWR),前者操作较为简单,成本较低;后者无需基站之间的时钟同步,且受时钟漂移影响较小,精度较高[22]。3个以上的定位基站就可以定位标签,比如三基站利用3个圆交于一点进行标签定位如图1所示,或者四基站时利用矩形分布对角线交点进行标签定位如图2所示。图中R1~R4为基站,d1~d4为各个基站到标签的距离。
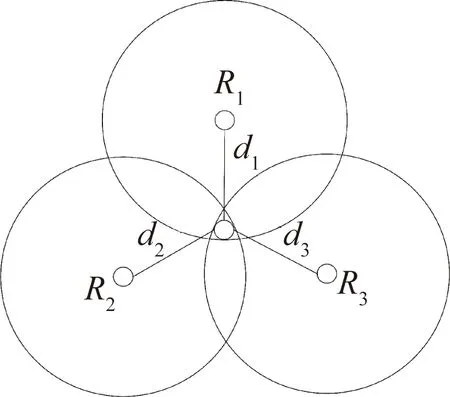
图1 三基站定位图
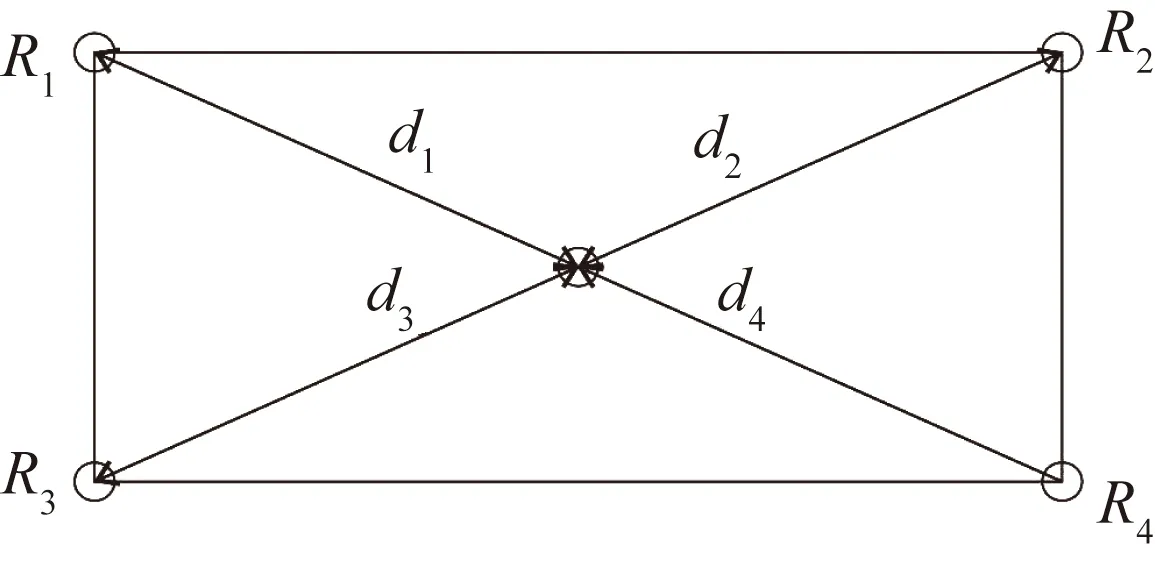
图2 四基站定位图
2.2 信号到达时间差法
TOA方法要求标签和基站的时间要具有精准的同步性,这对于系统硬件设施的要求相应提高。针对标签和基站之间的时钟无法做到精确同步甚至近似同步的情况,采用信号到达时间差法(Time Difference of Arrival,TDOA)可以极大地提高系统的精度,该方法只需要基站之间进行时间同步,因为基站的位置是固定的,基站之间进行时间同步比基站和移动终端之间进行时间同步要更加容易实现。根据其原理目前有3种应用方式。
① 系统中的信号发射端发射两种频率不同的信号(如UWB、超声波),因为它们在传播过程中的传输速度不一,因此通过计算到达接收端的时间差结合传输速度便可计算距离。
② 首先运用TOA方法计算UWB标签到n个定位基站(Base Station,BS)BS1、BS2,…,BSn之间的距离分别为d1、d2,…,dn,则计算公式如下。
…

(2)
式中:(x,y)为定位标签的坐标;(xn,yn)为各个基站的坐标;dn为运用TOA方法计算的各基站与定位标签之间的距离。然后根据上述的公式所得到的距离差绘制双曲线,2对以上的双曲线的交点处(有时可能会有多个交点,此时需要结合实际情况进行判定)即为待定位标签的位置,TDOA定位示意图如图3所示。
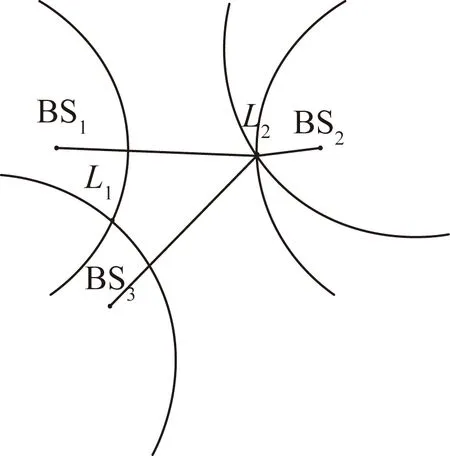
图3 TDOA定位示意图
图中BS1、BS2、BS3为3个基站的位置,通过绘制双曲线得到交点L1、L2,根据之前TOA定位结果可排除L1,因此初步确定L2处即为待定位标签的位置。
③ 将接收站信息通过服务器进行数据对比,并结合基站参数运算处理。但该方法巨大的计算量对于系统的运行压力较大,因此在实际应用中较为少见。
但不管何种应用方式,TDOA运用的都是相对时间,只要求各个基站之间的时钟同步即可,如此便极大地降低了系统对于时间同步的要求,同时也使得硬件电路变得相对简单,因此其应用也较为广泛。王桂杰等[23]借助TDOA的定位模型,着重分析了最小二乘法在求解三维定位坐标时精度误差产生的主要原因,提出了基于最小二乘法的定位优化算法。通过对实验结果进行分析,发现优化后的定位精度明显提高且定位效果稳定,平均定位误差为0.279 m,精度提升68.9%,稳定性提升52.9%。
2.3 信号到达角度法
信号到达角度法(Angle of Arrival,AOA)主要是通过测量信号移动台和基站之间的到达角度来估计标签的位置,在二维平面之中至少需要测出2个基站的数据才能定位1个标签,以基站为起点形成的射线必经过移动台,2条射线的交点即为理论上标签的位置。该方法只需2个基站就可以确定标签(Location Tag,LT)的估计位置,AOA方法定位图如图4所示。
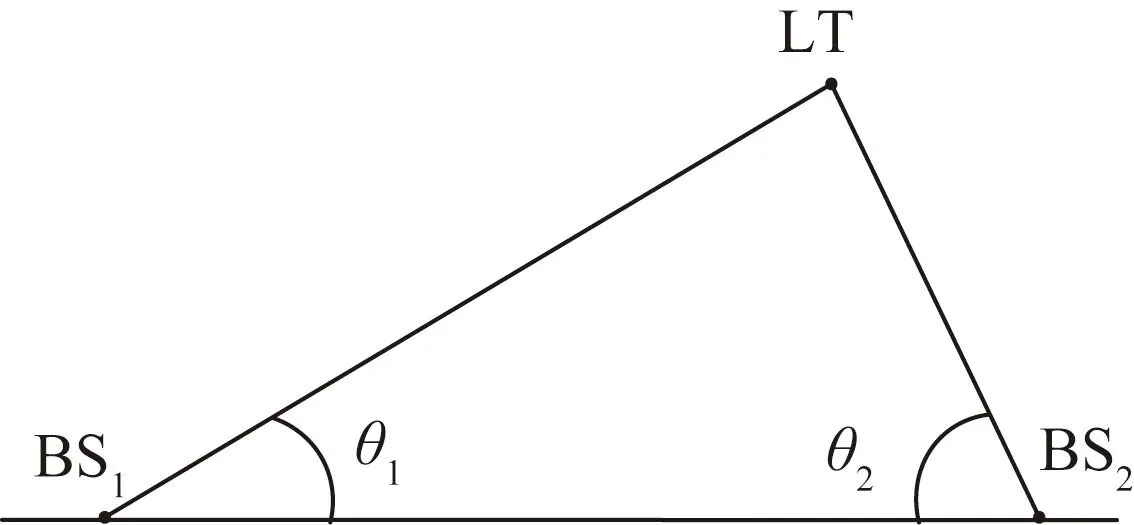
图4 AOA方法定位图
如图4所示,基站与定位标签LT构成一个三角形,基站BS1、BS2与LT之间的连线与BS1和BS2之间的连线的夹角分别为θ1和θ2。设BS1、BS2在坐标系中的坐标分别为(x1,y1)、(x2,y2);LT的坐标设为(x,y);则通过下面的公式即可计算出LT在平面中的定位坐标(x,y)。
(3)
AOA 的计算方式简单,但是发送端必须配备有向天线或天线阵列,该方法成本较高,这与价格较为便宜的UWB收发信号机相比可能无法接受,并且 AOA 在非视距环境中会因多径效应出现误判等情况,因此目前该方法在实际操作中应用较少。针对这个问题,Sun等[24]提出的基于AOA和TOA方法的5G与全球导航卫星系统(Global Navigation Satellite System,GNSS)联合定位方案是通过在原始估计位置执行平均移动操作来进一步降低噪音的影响,从而可以避免在TOA/TDOA方法中因时间无法精确同步问题而产生的误差,进而提升了联合定位系统的精确性和鲁棒性,因此AOA未来还有很大的应用前景。
2.4 信号接收强度法
大多数的信号在传输过程中都会出现损耗的情况,而信号接收强度法(Received Signal Strength,RSS)就是基于这一点,通过对传输过程中的损耗量建立数据模型来计算传输距离,具体是检测基站接收到的信号场强值,根据无线信号在自由空间的衰落模型和标签处信号的场强值来确定待定位目标与已知定位目标之间的关系进而确定定位位置。
在进行场强测量时,往往设置一个参考点,预先测出其信号强度,再根据衰落模型计算距离值。无线信号传播的信道模型为
(4)
式中:d为发射点与接收点的实际距离;d0为发射点与参考点的实际距离;PL0与PL(d)分别为参考点和接收点的信号强度;β为信道衰减因子;xδ为加性高斯白噪声,是一个满足正态分布的高斯随机变量。
二维定位下的RSS方法至少需要3个基站的RSS数据,可通过运用TOA方法中的三基站定位圆来确定目标位置,RSS方法虽然比较简单而且不需要同步信息但由于实际环境中存在如多径效应、非视距传播和天线增益等多种因素的干扰,从而会产生不同程度的误差,精度较低,因此在实际生活中对于精度有较高要求的场景中应用较少。对此Ademuwagun[25]提出了一种创新的RSS距离合理化算法来定位室内环境中的物体,并将该算法与简单移动平均(Simple Moving Average,SMA)算法进行了比较。对结果进行分析可知,该算法能更好地修正RSS,从而提高室内环境下的定位精度。
2.5 指纹定位方法
指纹定位算法(FingerPrint Location,FPL)是基于环境中的信号在不同位置反射和折射所形成的不同的信号强度信息而提出的一种算法。该方法的主要步骤如下。
(1) 建立指纹数据库。
① 收集指纹点。在合适的工作区域中,选择若干地点放置锚点,以从各个锚点接收到的基于TOA方法的测距信息记在一组数据库中,并且尽可能多地设立采样点,记录采样点到各个锚点的距离。
② 构建数据库。将m个采样点与n个锚点之间的距离写成矩阵的形式建立数据库L,则
(5)
式中:dmn为第m个采样点到第n个锚点间的距离;(dm1,dm2,…,dmn)为第m个采样点的指纹值。
③ 优化数据库。该步骤的目的是减少工作量并提高算法效率和定位精度,具体方法为在每个采样点和锚点之间多次测量取平均值,再将每个测距值与平均值之间作差,将差值较小的前80%个数据取平均值作为优化后的指纹值。
(2) 在线数据匹配。
该步骤是运用最近邻算法(Nearest Neighbor,NN)、K最近邻算法(K-Nearest Neighbor,KNN)以及权重K最近邻算法(Weight-K-Nearest Neighbor,WKNN)进行在线匹配[26]。
① NN算法,即基于类比学习的匹配算法。实际过程中在线测量的定位数据称为定位指纹,先前操作过程中储存在数据库中的定位数据称为位置指纹,计算定位指纹和位置指纹的欧几里得距离,将距离最近的那个位置指纹定为估计位置。因此该算法的精度与离线采样的密度具有较大相关性。
② KNN算法。它是NN算法的改进,其原理是选出k个与待测点最邻近(即欧氏距离D最小)的位置指纹,对这k个指纹求平均值,得到的新的指纹视为定位指纹的估计位置,公式为
(6)
该算法相较于NN算法精度有所提高,但也提高了复杂度,其次由于离线数据库中相似指纹的影响,可能产生较大误差。
③ WKNN算法。它是KNN算法的改进,根据每个指纹对定位的贡献不同,对k个指纹赋予不同的权重系数,公式为
(7)
式中:Di为待测定位指纹与第i个邻近点间的欧式距离;n为归一化后的权重系数;ε为一个较小的正常数,以避免分母为0。
由式(7)得到的权重系数与两点之间的欧氏距离成反比,该方法显著地提高了定位精度。Zeng等[27]指出建立和优化指纹定位数据库的关键在于选择合适的无线接入点(Access Point,AP)。并在信息论的角度下分析了AP选择性能的上限,给出了它的数学表达式,为指纹定位设定了一种新型的AP选择模式,该模式综合考虑了信号的时变性以及复杂度成本。实验结果表明,与传统的层次分析法(Analytic Hierarchy Process,AHP)算法相比,AP选择算法模型的定位精度提高了47%。
除此以外,指纹定位算法还可与其他算法结合进而提升定位精度,如Chen等[28]提出了一种无基站特殊算法来借助指纹测算基于RSS的距离关系,该算法相对于具有广泛适用性和简易操作性的SMA算法来说较好地改进了RSS方法。评估结果表明,该跟踪方法在室内环境下仅需稀疏的RSS指纹就能达到5 m的高精度(最高可达95%)。
2.6 定位方法对比汇总
除上述5种方法以外还有邻近探测法[29]、极点法、航位推算法[30]等。而在这些方法中,AOA、TOA和TDOA方法用的最多,室内定位技术方法对比如表2所示。
通过上文对UWB室内定位方法原理及表2中对其在测距方式、定位精度等方面数据的比较,用户可根据自己的相关需求选择合适的定位方法。然而确定了定位方法之后需要依靠具体的硬件设施和软件来进行功能实现,因此接下来对UWB室内定位硬件设施进行总结。

表2 室内定位技术方法对比
3 超宽带室内定位硬件设施
目前随着UWB定位技术逐渐成为室内定位的主流技术,国内外许多生产UWB定位产品的企业的竞争更加激烈,如英国Ubisense、美国Zebra、爱尔兰DecaWave (DW1000芯片)、荷兰NXP等企业,国内的恒高、唐恩科技、精位科技等企业。目前市场上提供的室内定位硬件设施主要可以分为2类:一类是芯片或开发板产品,如DecaWave公司的DWM1000、DWM1001,清华讯科公司的TSG5162和南京沃旭公司的UM221;另一类是完整系统产品,如Ubisense、Zebra 公司的Dart、成都恒高公司的EH100602等。
表3为目前市面上应用较多的几款主流产品在测距精度、测距范围、通信接口、开发方式以及价格5个方面的对比汇总。
从表3的性能数据来看,目前国内外大多数UWB室内定位产品的精度在10~30 cm之间,且大部分需要特定的、与之匹配的平台软件对硬件产品进行操作和开发从而实现系统的定位要求。从价格来看,芯片和开发板类的产品在几十到几百元不等,且大多数是标签基站一体化;而完整系统产品之中,标签和基站分别为几百和几千元不等,有些系统还需要其他设施。从应用角度来看,芯片和开发板类的产品较适合用来进行科学研发,若要实际应用还需要跟其他产品进行集成,难度较大;而完整系统产品只需与相关企业进行订购并由其进行安装便可使用。
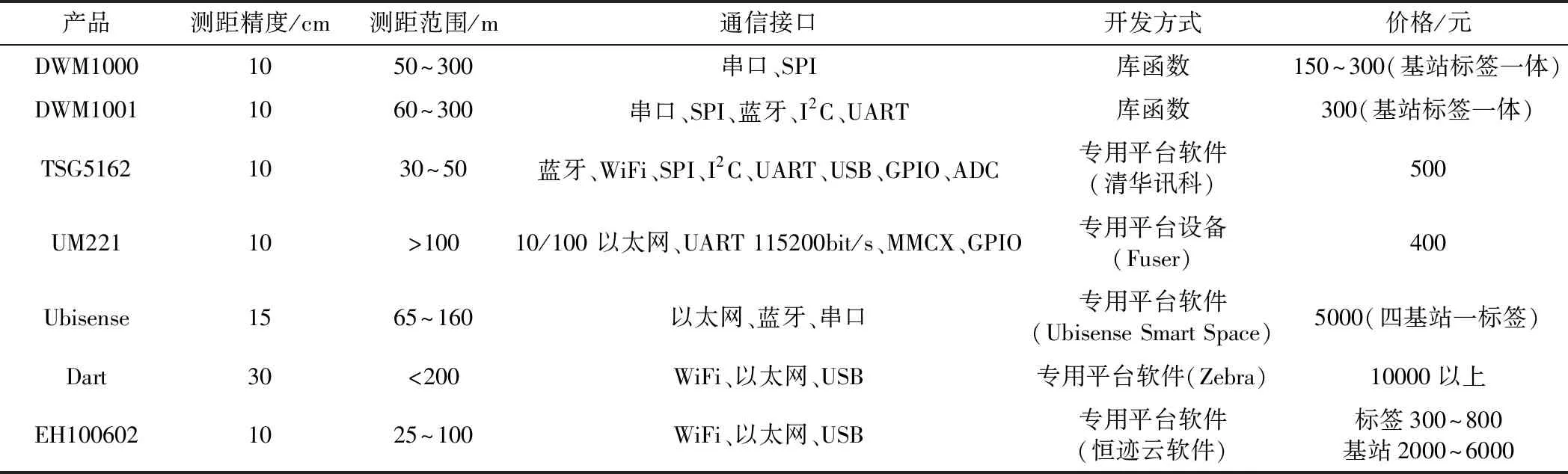
表3 UWB室内定位硬件性能及价格表
除上述企业产品以外,目前市场上的企业还有国外的美国Time domain、法国BeSpoon、荷兰恩智浦,以及国内的成都精位科技、中海达(郑州联睿电子)、广州浩云科技、南京唐恩科技、上海环旭电子、上海仁微电子、深圳金溢科技、杭州新华等企业。
4 结束语
从室内定位技术、UWB定位方法和UWB硬件设施3个角度对室内定位技术进行了分析和总结,针对以UWB技术为基础的室内定位技术方法进行了综合论述,对构建高精度室内定位系统有以下认识。
① 与其他定位技术相比,UWB技术具有穿透力强、抗多径效果好、安全性高、系统复杂度低、定位精度高等特点。在一些要求高精度的定位工作如对煤矿人员位置和运动轨迹的信息监测或医院中对贵重的医护设施的保管应用上具有较大的优势,更适用于笔者提出的高精度室内定位系统的构建。
② 与其他定位方法相比,TDOA方法具有定位精度高、可容纳标签数量多等特点,在构建高精度的UWB室内定位系统时可主要应用以TDOA或其与其他方法结合为原理的技术手段。
③ 与其他硬件设施相比,对于所要搭建的高精度的室内定位系统,若相关机构具有一定的开发能力且经费紧张,可以选择DWM1000或DWM1001进行开发,搭建定位平台;若不具有开发能力且经费充裕,可以选择国产恒高EH100602系列产品搭配其配套软件“恒迹云软件”直接进行使用。
目前 UWB技术的应用需求主要有以下几方面。
① 养老防护型室内定位系统——UWB+ EH100602。
将恒高EH100602铺设在需要的室内环境中,为相关人员佩戴仪器或安装标签,依靠恒迹云软件在总信息台进行监管。一方面对医院的患者(新生儿、残疾患者、高龄老人等)的位置情况进行监管;另一方面对医院内贵重仪器进行位置监控。
② 矿井下作业定位系统——UWB+ LED可见光定位+ UM221。
在矿井工作人员身上放置UM221设备,并在矿井之下铺设LED可见光作为矿灯照明,借其功能辅助UWB进行定位,对井下人员位置情况进行监管,及时通知工作人员远离危险区域。
除此以外UWB还有更多的应用方向,如工厂零件装配、监狱人员监管等。而在未来大数据和人工智能的时代背景下,高精度的室内定位系统的发展方向应致力于以下几个方面。
① 应将系统的数据集成化即标签功能拓展。例如在养老防护应用中将老人心率、血压、每天运动数据等指标加入其中,后台可随时掌握老人每一个细微波动,一旦发现老人相关生理指标异常,可进行及时干预,保障老人安全。
② 在保证精度的前提下降低成本。UWB室内定位系统需要基站、标签、引擎、应用系统等若干组成部分,与WiFi、蓝牙、RFID相比成本稍高,因此今后的研究应着力于改进算法,进而降低硬件成本。
③ 降低非视距(Non-Line of Sight,NLOS)环境的影响。现代的室内场景大多具有较多的设施和器材,如医院、煤矿等。NLOS影响较为严重,尤其是对高精度的室内定位系统的影响较大,因此今后的研究应着力于通过改进算法和硬件方面,降低系统受NLOS环境的影响。
④ 开发融合算法。随着不同技术之间实现兼容的可操作性越来越大,不同算法之间进行组合的融合算法必然具有更高的精度和更好的稳定性,因此多传感器组合定位将是未来室内精确定位发展的重要方向之一。
不过随着数字信息化时代的发展以及无线信号技术的进步,未来对于更高精度的室内定位需求必然更加迫切,因此以UWB技术为代表的室内定位技术在构建高精度室内定位系统方面具有较大的发展空间和潜力,并可结合人工智能等其他技术进一步发展,进而迎合时代的要求。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
科学家(2022年3期)2022-04-11
导航定位学报(2022年1期)2022-02-17
汽车工程(2021年12期)2021-03-08
小天使·一年级语数英综合(2020年10期)2020-12-16
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
