一种无人机自主规避导弹的威胁度评估方法
2022-07-30 08:25郭强何胜杰程家林王兴虎孙亘郭菲
航空科学技术 2022年7期
郭强,何胜杰,程家林,王兴虎,孙亘,郭菲
成都飞机工业(集团)有限责任公司,四川 成都 610091
无人机规避导弹问题属于追逃问题,追击者为导弹,逃逸者为无人机。导弹根据自身导引律追击无人机,无人机根据方法策略规避导弹。无人机规避导弹的方法有专家系统法[3-4]、最优控制法[5-7]、微分对策法[8-10]和深度强化学习法[11-13]。专家系统法依靠相关领域经验,根据不同情况做出不同决策。当增加新的经验时,需要对以前的策略进行增加或修改。最优控制、微分对策方法依赖于模型,需要对方程求解,但实际中模型很难准确知道。深度强化学习使用神经网络和强化学习的结合,通过大规模仿真训练,优化出适合规避导弹的模型。但基于深度强化学习的方法,需要大规模的训练,且对于状态空间的覆盖有限,对于某些点可能存在无效的情况。Khatib 于1986 年提出了人工势场法,并在机器人领域得到应用。相比机器人路径规划,无人机同样可以使用人工势场法对导弹的势场构建[14-16],并通过使用此方法的决策,控制无人机飞行。
综上所述,本文将人工势场法用于无人机规避导弹问题中,构建一套无人机规避导弹系统。使用人工势场法实时构建导弹的势场,无人机沿势场梯度方向运动,规避导弹。本文提出在运动的无人机和导弹坐标系中构建导弹人工势场,并提出距离+导弹进入角势场函数对导弹威胁度评估,将人工势场的决策转化为无人机的控制指令。为了验证该方法的有效性,使用六自由度无人机模型、质点导弹模型进行仿真验证。
1 追逃模型构建
为了讨论无人机规避导弹问题,首先需要构建无人机规避导弹的追逃模型,如图1 所示。其中,Vm为导弹速度,Vu为无人机速度。qm为导弹进入角,即导弹速度矢量与视线方向的夹角,λ为无人机进入角,即无人机速度矢量与视线的夹角。

图1 无人机和导弹相对运动模型Fig.1 Relative motion model of UAV with missile
导弹使用比例导引追踪目标,无人机使用适当的规避策略来逃脱导弹追击。本文主要进行方法层面的验证工作,未考虑传感器影响。在仿真中,无人机能够实时获取战场态势和导弹态势。
2 人工势场
2.1 势场在无人机坐标系定义
创建势场函数时,为了构建势场的直观性,本文以导弹为中心建立势场函数,根据无人机相对导弹位置,评估导弹势场对无人机的作用。而在无人机规避导弹问题中,导弹和无人机使用的坐标系不同。无人机的坐标不能直接在导弹的坐标系中表示。因此,需要有统一的坐标系,将导弹和无人机的相对位置表示在坐标系中,以导弹为中心建立势场函数。
使用导弹和无人机的经纬度信息,在地心轴系下,计算导弹和无人机的相对坐标。由于最终需要对无人机进行控制,因此将相对坐标从地心轴系转到无人机牵连地轴系。无人机牵连地轴系原点定义在无人机体轴系原点,x轴指向正北,y轴指向正东,z轴铅垂向下。如图2 所示,从地心坐标系向无人机牵连地轴系旋转变换,可以通过以下三步实现:(1)绕Z轴转动经度λ,形成坐标系X1Y1Z1,其中X1垂直于地面方向向上,Y1在赤道平面内与赤道相切指向东,Z1垂直于赤道平面指向北;(2)绕Y1轴转动纬度−φ,形成坐标系X2Y2Z2,其中X2垂直于地面方向向上,Y2在纬度平面内与纬线相切指向东,Z2与经线相切指向北;(3)绕Y2轴转动-90°,与无人机牵连地轴系重合。
⑦地方政府确保投入。地方各级政府要将水土保持治理经费列入当年年度财政预算,并随着财政收入好转逐步增加水土保持工作经费。根据规划,每年市和县级财政应当安排治理水土流失生态修复投资1 000万元以上,确保目标任务的全面完成。
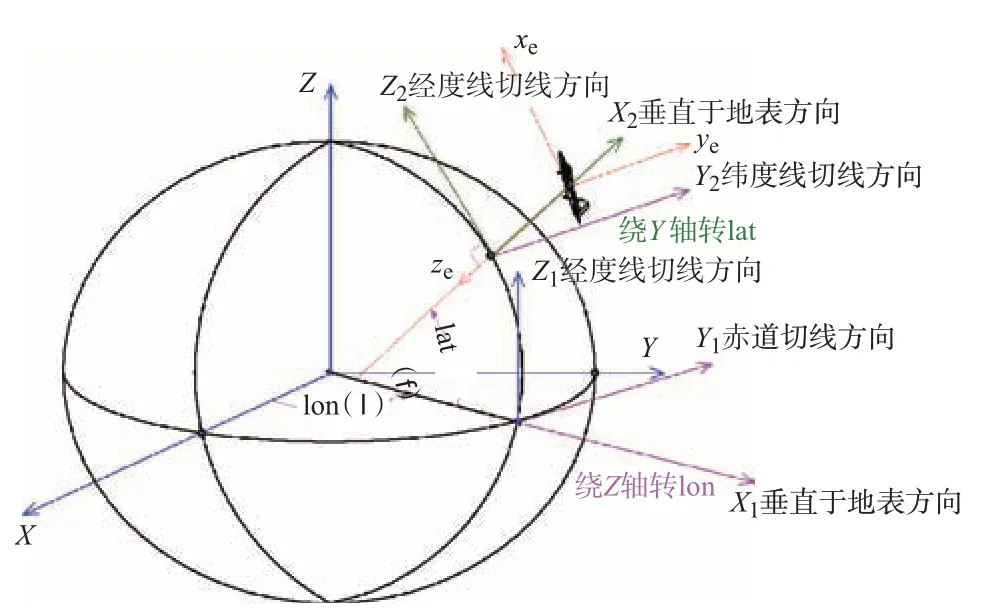
图2 地心坐标系向无人机牵连地轴系旋转过程Fig.2 Rotation of earth center coordinate system to aircraft traction ground coordinate system
由于无人机的牵连地轴系以无人机为中心,因此需将坐标系原点移动到导弹中心。假设导弹在无人机牵连地轴系的位置为M(x0,y0,z0)。由于需要以导弹为中心构建势场,则无人机在人工势场中的坐标设置为N(−x0,−y0,−z0)。将此坐标代入人工势场的公式,即可求取无人机受到导弹的势场力。因此,所有在无人机牵连地轴系的矢量,通过减去M(x0,y0,z0),可转为以导弹为中心的矢量。
2.2 势场函数构建
假设无人机关于导弹的相对位置为(xt,yt,zt),则导弹与无人机的距离为

式中:(xt,yt,zt)为无人机相对于导弹的位置,D为导弹与无人机的距离。
距离势场函数可以创建为如下形式

式中:kD为正的系数,D为导弹与无人机的距离,σ为小量,防止分母为0 和乘数为0,造成(0,0)点突变。Dbound为距离边界,大于此值势场作用为0。UD为距离势场函数。
根据上述公式,绘制不同高度时的距离人工势场如图3所示。图3 中z方向代表势场大小,颜色映射势场的大小,红色为势场大的地方,蓝色为势场小的地方。由图3可知,势场大小以(0,0)点为中心,向四周不断下降。当无人机沿势场减小的方向运动时,将增大与导弹的距离,远离导弹的威胁。

图3 高度为0m、1000m、5000m时距离人工势场Fig.3 Distance APF at h=0,h=1000m,h=5000m
在无人机规避导弹问题中,由于距离势场函数考虑高度的影响。而无人机爬升性能并没有导弹强,导弹在发射后,急速提高速度,短期速度增加能力比无人机高。因此,使用距离势场函数时,可以去掉高度的影响,即

导弹对无人机的威胁不仅可以从距离角度考虑,也可以从导弹进入角(导弹速度方向与视线方向的夹角)考虑。设导弹进入角为qm,导弹速度为(vx,vy,vz),同样不考虑高度的影响,导弹进入角计算公式如下所示

式中:qm为导弹进入角,Vm为导弹速度矢量,MP为无人机与导弹的视线矢量。导弹进入角的势场函数创建为如下形式
式中:ka为正的系数,qm为导弹进入角,σ为小量,防止分母为0和乘数为0。Dbound为距离边界,Ua为导弹进入角势场函数。
假设导弹速度方向沿x轴方向,绘制高度为0时的导弹进入角势场函数,如图4所示。

图4 高度为0时导弹进入角势场函数Fig.4 Missile aspect angle APF at h=0
人工势场以x轴正方向(导弹速度方向),往x轴负方向(背离导弹速度方向),势场不断下降。沿势场减小的方向,能够使导弹的速度方向与视线方向不一致,从而耗散导弹的能量。进一步考虑距离势场函数与导弹进入角势场函数的结合,如下形式
式中:kw为权重系数,调节距离势场和导弹进入角势场之间的比例关系。Ut为距离+导弹进入角势场函数。其他参数与其他势场函数中意义相同。
绘制不同权重系数下的势场函数,如图5 所示。图5中,权重系数越大,势场函数越偏向于导弹进入角势场;反之,越偏向于距离势场。
图5 高度为0时距离+导弹进入角势场函数Fig.5 Distacne+missile aspect angle APF at h=0
创建势场函数后,使用梯度下降法对三维x,y,z方向分别求偏导,得出输出势场函数对于x,y,z的偏导数,即dUx,dUy,dUz。将求导得出的势场力方向作为无人机速度使用,则无人机以此速度方向运动,可以有效规避导弹。

式中:dUx,dUy,dUz为x,y,z方向的偏导数,Vapfx,Vapfy,Vapfz为速度矢量在x,y,z方向的分量。将上述速度矢量转化为控制指令
式中:|Vapf|为速度矢量,Vc为速度指令,γc为爬升角指令,χc为航向指令。势场函数控制无人机方向,飞控中,将速度/爬升角/航向指令进一步转化为过载指令控制无人机飞行。
3 仿真校验
为了验证不同势场函数规避导弹的效果,使用自主开发的仿真软件进行仿真分析。仿真中设置同样的初始条件,设置发射导弹无人机(攻击机)和规避导弹无人机(规避机)的初始高度都为5000m,初始速度为Ma0.9。
本文使用的模型假设条件包括:(1)无人机使用六自由度模型,导弹使用质点模型,考虑导弹的升阻特性和推力特性;(2)导弹采用比例导引制导;(3)不考虑风的影响。
导弹模型参考AIM-120 进行配置。AIM-120 是第四代雷达型空空导弹,是现有空空导弹系统的重要力量,将该型导弹选为仿真试配对象具有代表性,所得结论对于无人机规避导弹具有普适指导意义。在本仿真中,配置导弹瞄准线最大角速率为32,主动段距离15km,最大过载限制22,发动机工作时间5.6s,最大速度可达Ma4,制导方式为指令制导+惯性制导+主动雷达末制导,制导率为比例导引,杀伤半径10m。
使用不同的势场函数进行仿真,观测仿真结果。图6为迎头条件下,无人机使用距离人工势场规避导弹的仿真结果示意图。图6中,无人机发现导弹后,距离势场函数控制无人机急速转弯,将导弹置于尾后。之后保持与导弹方向相同,无人机成功规避导弹。仿真过程中,导弹的速度、升力系数、阻力系数、推力与无人机距离的变化如图7所示。

图6 无人机使用距离人工势场规避导弹Fig.6 Missile avoidance by distance APF

图7 仿真过程中导弹数据变化Fig.7 Missile data changes in simulation
使用导弹入射角势场函数的仿真结果如图8所示。图8中,使用导弹进入角势场函数,人工势场法决策无人机扩大导弹进入角。无人机通过不断转弯,增大导弹进入角。在此过程中,导弹能量被消耗,最终无人机使用导弹进入角人工势场成功规避导弹。
图8 无人机使用导弹进入角人工势场规避导弹Fig.8 Missile avoidance by aspect angle APF
使用距离+导弹进入角势场函数,能够同时拥有距离势场和导弹进入角势场的效果,如图9 所示。图9 中,迎头态势下,距离+导弹进入角的势场函数控制无人机进入尾追态势,之后通过增加导弹进入角耗散导弹的能量。

图9 无人机使用距离+导弹进入角人工势场规避导弹Fig.9 Missile avoidance by distance+aspect angle APF
4 结论
本文使用人工势场法研究无人机规避导弹问题。将人工势场建立在无人机牵连地轴系,使用相对坐标,将坐标原点建立在导弹中心。根据无人机在导弹威胁势场中的梯度方向,在线决策无人机的运动方向。通过仿真手段,本文验证了人工势场方法能够控制无人机规避导弹,并提出距离+导弹进入角势场函数评估导弹的威胁度,利用距离势场和导弹进入角的特点规避导弹。
人工势场能够实时根据无人机和导弹的相对态势,在线作出决策。本文使用的人工势场规避方法可通过构建不同的势场函数,采取不同的威胁度评估方法,即不同策略规避导弹。
猜你喜欢
防爆电机(2022年3期)2022-06-17
北京航空航天大学学报(2021年4期)2021-11-24
成都信息工程大学学报(2019年3期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
测控技术(2018年9期)2018-11-25
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
系统工程与电子技术(2016年4期)2016-08-24
舰船科学技术(2016年1期)2016-02-27