高超声速飞机气动外形概念设计
2022-07-30 08:25刘济民颜仙荣张朝阳沈伋
航空科学技术 2022年7期
刘济民,颜仙荣,张朝阳,沈伋
海军研究院,上海 200436
临近空间高超声速情报、监视及侦察(ISR)飞行器具有飞行速度快、反应时间短、突防能力强、作战效能高等优点,可以凭借速度和高度的优势完成普通飞行器无法完成的高难度情报、监视和侦察任务,在军事上具有巨大的战略意义[1-2]。20 世纪初,美国就开展了高超声速飞机的相关研究,并先后提出了多个概念方案。廖孟豪等[3]对美国军方和军工部门提出的4个高超声速作战飞机概念方案进行了梳理,对比分析了各个概念方案的气动布局特点,分析认为,美国高超声速作战飞机气动布局向提升低速特性、降低内外流耦合程度、增加机身容量等方向演变。左林玄等[4]详细总结了高超声速飞行器的气动布局分类,并指出未来高超声速飞行器的布局将向翼身融合布局和乘波体布局两个方向发展。李宪开等[5]结合高超声速飞机的需求,分析了高超声速飞机气动布局设计存在的问题、难点和关键技术。
气动布局技术是水平起降高超声速飞机研制的核心技术之一。崔凯等[6-7]采用前体/发动机一体化设计思想,给出了一种双旁侧进气翼身融合体概念设计方案。国内对高超声速飞行器的相关研究日趋活跃,但对高超声速飞机尤其是气动布局方面的研究还不多,而且缺乏具体的应用背景和需求指标牵引。刘济民等对高超声速ISR平台的军事需求进行了分析,并对其在未来海战中的应用进行了研究[8]。根据军事需求分析得到的能力需求,目前的技术发展水平和对未来作战使用的基本构想,对高超声速ISR 平台做以下技术想定,见表1。

表1 高超声速ISR平台主要技术指标Table 1 Main technology index of hypersonic ISR vehicle
本文以上述高超声速ISR 平台目标图像为需求牵引,拟采用类乘波体气动布局,对高超声速ISR平台的气动外形进行初步设计与性能分析,并进一步验证气动外形概念方案满足设计需求的程度,找到军事需求与技术满足度之间的差距,为高超声速飞机气动布局技术研究指明努力的方向。
1 气动外形设计方法
气动外形设计包括乘波前体气动外形优化设计、机翼设计。在此基础上,进行高超声速ISR 平台气动外形一体化设计,包括乘波前体与机身的集成、机翼与机身的集成,以及后体与机身的集成三部分。
1.1 乘波前体设计
作者前期对高超声速ISR平台的乘波前体进行了优化设计和性能分析,优化后的乘波体具有应用于高超声速ISR 平台气动外形设计的潜力。因此,选取参考文献[9]中优化后的乘波体作为高超声速ISR平台的机身前体。
1.2 机翼设计
对于大多数的高超声速飞行器,机身为主要升力面,利用前机身的压缩产生主要升力。机翼作为次要升力部件,具有很大的改善空间,也需重点设计。由参考文献[9]可知,高超声速ISR 平台乘波前体提供了一半以上的升力(113482N),还有一小半升力需要机翼来提供。另外,为了满足水平起降设计要求,也需对机翼进行详细设计。这就是高超声速机翼的设计目标。
为了保证较好的波阻特性,对于高超声速飞行器来说,在进行翼型设计选择时一般会考虑较薄的对称翼型,通常采用对称双弧形翼型、小展弦比大后掠梯形翼面[10]。机翼形状相对简单,由翼型参数和翼平面参数控制。对于高超声速巡航类飞行器,机翼外形既要保证高超声速ISR 飞行器巡航飞行时的升力和配平特性需求,又必须保证水平着陆时需要的高升力特性,同时机翼的重量还要轻。综上考虑,确定高超声速机翼的设计参数值及几何参数见表2。

表2 机翼几何参数Table 2 Geometry parameters of wing
采用计算流体力学(CFD)方法来计算机翼的气动性能,并对机翼升阻比L/D与迎角α进行非线性回归分析。高超声速机翼在迎角5° ≤α≤14°范围内的气动性能数值计算结果见表3。其中,FL、FD分别为高超声机翼的升力和阻力。

表3 机翼气动性能与迎角的关系Table 3 Relationship between aerodynamic performance of wing vs α
图1 为高超声速机翼的升力、阻力和升阻比随飞行迎角的变化关系曲线。由图1 可知,高超声速机翼基准构型的升力和阻力均随迎角α的增大而增大,但阻力的增长幅度大于升力的增长幅度,导致升阻比随迎角的增大而降低。迎角大于9°以后,阻力急剧增大。升力与迎角α近似为线性关系,阻力和升阻比与迎角α呈二阶关系。随着迎角的增大,升阻比减小,但在小迎角下,升力的绝对值小。因此,在实际应用时,宜采用适当大小的安装角。

图1 气动性能随迎角的变化曲线Fig.1 Change curve of aerodynamic performance vs angle of attack
对机翼升阻比L/D与迎角α进行非线性回归分析。由图1可知,机翼的升阻比L/D与迎角α呈二阶关系。依据表3中的计算结果得到非线性回归模型如下

回归方程中迎角α的单位采用角度制。由高超声速机翼的L/D与迎角α之间的关系,可根据升力需求来合理确定机翼的安装角,并且可以为高超声速飞行器气动模型的建立和控制系统设计提供依据。
1.3 后体设计
高超声速飞行器后体/尾喷管一体化设计也是机体/发动机一体化设计的一个重要部分。后体/尾喷管一体化设计要求将后体作为发动机喷管膨胀面的组成部分,从而可以减小发动机的重量,降低外部阻力。在高超声速吸气式推进系统中,多采用单壁膨胀喷管取代传统的对称形式的推进喷管。单壁膨胀喷管能将飞行器后体下表面作为尾喷管的一部分,而且单壁膨胀喷管的非对称结构设计,使得飞行器在非设计状态飞行时,喷管具有一定的自适应补偿特性。另外,单壁膨胀喷管结构的不对称性,使整个飞行器产生很大的附加升力和俯仰力矩,从而影响到飞行器的飞行性能和配平特性。
1.4 一体化集成方法
高超声速ISR平台的中部机身由前机身尾部截面拉伸得到。对乘波前体的底部顺着乘波前缘的方向进行拉伸,水平长度为4m,与1.2节中的翼根弦长一致,也是涡轮基组合循环发动机(TBCC)燃烧室的长度。机翼与机身的集成主要由两个参数确定:一是机翼在机身的安装位置,二是机翼安装角。由于翼根长度与机身中部的长度一致,机翼安装于机身中部的两侧。由于乘波前体和中部机身都有8.62°的向下倾角,为了使机翼尽可能地不破坏乘波前体和机身中部的流场结构,机翼安装角确定为8.62°。本文对后体/尾喷管的设计进行了简化处理,具体方法如下:尾喷管由机身向后等比例缩小产生,尾喷管长度为2m,上表面与机身平齐,下表面向上倾斜。按上述方案一体化集成后的高超声速ISR平台气动外形如图2所示。
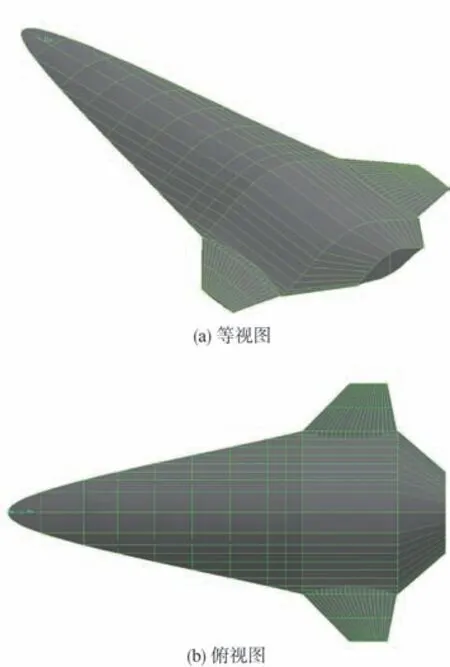
图2 高超声速ISR平台概念外形Fig.2 Aerodynamic shape of hypersonic ISR vehicle
高超声速ISR平台概念方案的气动外形几何参数见表4。机身体积(不包括机翼)为36.594m3,机身表面积(不包括机翼)为41.117m2。气动外形的容积率定义为[1-13]

表4 高超声速ISR平台几何参数Table 4 Geometry parameters of hypersonic ISR vehicle

式中:V为机体的体积,Sw为机体的湿面积。由式(2)可算出高超声速ISR平台的机身容积率为0.2681。
2 性能分析
计算域为椭圆柱,长为20m,长半径(Z向)为10m,短半径(Y向)为5m。采用非结构四面体网格,对壁面附近网格进行了加密处理,壁面上单元大小为1mm,计算域网格总数为1954万,计算域及网格示意图如图3所示。

图3 三维计算域及网格示意图Fig.3 3D computation grids and domain
计算域的前面和上下边界采用压力远场边界条件,其他边界采用压力出口条件,壁面处按等温、无滑移处理,壁面温度设为1000K[14]。考虑到高超声速激波分辨和黏性计算精度等问题,数值方法空间采用AUSM+格式[15-18],时间项采用全隐格式。采用RNGk−ε两方程湍流模型和增强型壁面函数[19]来模拟湍流。计算中采用的自由流条件按标准大气给出,见表5。

表5 自由流条件Table 5 Freestream conditions for computation
2.1 设计状态下气动性能
图4 为高超声速ISR 平台上下表面压力云图。由下表面静压云图可知,概念外形不仅乘波前体下表面压力高,机身中部下表面也处于高压区,只有尾部由于向上收敛,导致气流膨胀,压力减小。概念方案中机身中部向下倾斜,流经乘波前体上表面的气流流经机身中部时膨胀,压力降低。从上表面压力云图可知,在机翼前缘与机身结合处存在高压气体泄漏,机翼前缘与机身的结合处还需进行详细设计,可以进一步提高全机的升阻比。高超声速ISR平台三维基准外形的气动性能见表6。其中,气动力系数采用的参考面积为机身横截面的最大面积,与乘波前体的底部面积Sb相同(Sb=7.388m2)。

表6 三维基准外形气动性能Table 6 Aerodynamic performance of 3D benchmark model
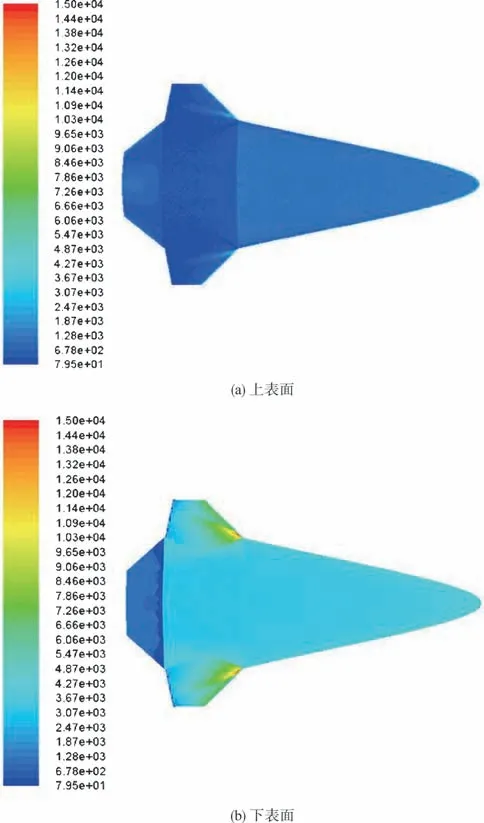
图4 高超声速ISR平台机身表面压力云图Fig.4 Pressure contours on the surface of hypersonic ISR fuselage
由表6 可知,三维基准外形的升阻比较高,与乘波前体的升阻比4.9028 相比,降低了0.0206,降幅仅为0.42%。计算结果和压力云图均表明机身中部也保持了较好的乘波特性。本文设计的高超声速ISR平台气动外形的升阻比高于参考文献[20]~文献[22]中设计的高超声速飞行器气动外形的升阻比。
下面对高超声速ISR 平台各个部位所受的力进行分析,各个部位的受力情况见表7。其中,下标“f”代表机身的乘波前体、下标“c”代表中部机身、下标“a”代表机身的后体、下标“w”代表机翼。由表7 可知,乘波前体是气动外形的主要升力来源,占总升力的44.19%,与一体化集成前相比,气动性能基本没变,仍然保持了较好的升阻比特性。机身中部产生的升力大小仅小于乘波前体,占总升力的33.92%,阻力占总阻力的29.94%。中部机身的升阻比为5.5313,高于乘波前体。由于机翼安装角为8.62°,相当于有8.62°的迎角,此时机翼的升阻比为4.6786,与机翼升阻比回归模型(见式(1))的计算结果4.6776基本吻合。

表7 机身各个部位所受的力Table 7 Aerodynamic force of each part
2.2 非设计状态下气动性能
高超声速飞机飞行速度跨越亚声速、跨声速、超声速和高超声速,这就要求飞机的飞行性能具有宽速域全包线的适应性,气动布局需要兼顾整个飞行速域进行匹配设计。为了进一步了解高超声速ISR平台气动外形在宽速域和宽高度域条件下的气动性能,对高超声速ISR 平台在非设计状态下的气动性能进行了分析。
(1)非设计飞行马赫数性能分析
保持飞行高度H=30km 不变,采用数值计算方法分析概念外形在Ma5~Ma7 范围内的气动性能,计算条件见表8。图5 为高超声速ISR 平台概念外形的升力系数、阻力系数和升阻比随飞行马赫数Ma的变化关系曲线。

图5 气动性能随飞行马赫数的变化曲线Fig.5 Change curve of aerodynamic performance vs Ma
由图5可知,在Ma5~Ma7范围内,高超声速ISR平台的升力系数、阻力系数和升阻比均随Ma的增大而变小。高超声速ISR平台的气动性能随Ma的变化总体不大,升阻比的变化量在1.03%以内。升阻比均大于4.84,保持了较好的高升阻比特性。当Ma=5.0 时,高超声速ISR 平台虽然升阻比较大,但由于此时的动压(20.948kPa)比设计状态Ma=6.0 时(30.165kPa)减小了30.56%,升力仅为1.954×105N,但仍能保持巡航飞行的升力需求,此时的飞行阻力为3.96×104N。当Ma=7.0时,高超声速ISR平台的飞行阻力为6.6666×104N,远超超燃冲压发动机所能提供的推力(4.2×104N)。
(2)非设计飞行高度性能分析
保持飞行马赫数Ma6.0不变,对飞行高度H=20~40km范围内的气动性能进行计算,计算条件见表8[23]。
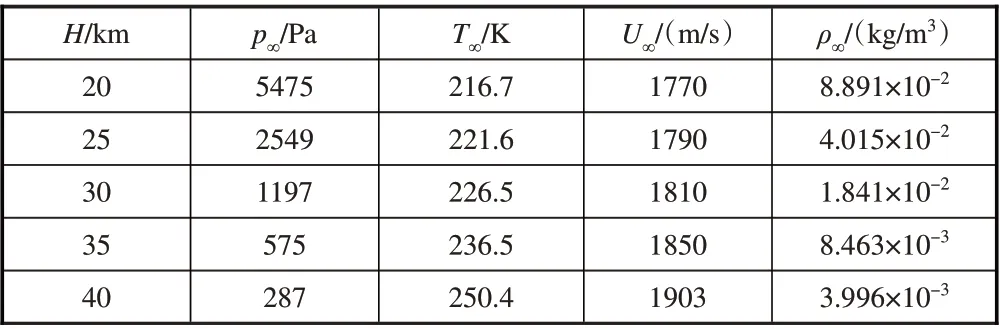
表8 计算条件Table 8 Freestream conditions for computation
图6为高超声速ISR平台概念外形的升力系数、阻力系数和升阻比随飞行高度H的变化关系曲线。由图6 可知,在H=20~40km 的范围内,高超声速ISR 平台的升力系数随飞行高度H的增大先变小后增大,阻力系数随飞行高度H的增大而增大,升阻比均随飞行高度H的增大而变小。高超声速ISR 平台的气动性能随飞行高度H的变化总体不大,升力系数的变化量在1.52%以内,阻力系数的变化量在4.85%以内。升阻比均大于4.72,保持了较好的高升阻比特性。当H=20km 时,高超声速ISR平台虽然升阻比较大,但由于此时的空气密度较大,导致动压(139.274kPa)比设计状态H=30km时(30.165kPa)增大了4.617倍,升力和阻力远远超过设计要求。当H=40km时,由于密度很小,此时的动压仅为7.236kPa,为设计状态H=30km 时(30.165kPa)的24%,升力太小,也不能满足飞行要求。

图6 气动性能随飞行高度的变化曲线Fig.6 Change curve of aerodynamic performance vs H
由图5、图6 还可知,飞行高度对高超声速ISR 平台气动性能的影响大于飞行马赫数对气动性能的影响。上述研究结果可为高超声速ISR飞行器的飞行特性分析与飞行轨迹优化设计提供参考。
3 高超声速ISR平台概念方案需求验证
由2.1节计算结果可知,高超声速ISR平台气动外形总的升力超过2.5×105N,即使与推进系统进行一体化设计后有部分升力损失,也能满足升力需求。总的阻力为52368N,在保持升阻比不变的情况下,当升力为2.0×105N时,对应的阻力为41894N。对超燃冲压发动机来说,这个推力需求在可接受范围之内。
当把飞行器的升阻比L/D、巡航速度V和推进系统的比冲Isp视为常数时,航程R可用Breguet公式表示为[24]

式中:m0为飞行器巡航飞行时的满载质量,mfuel为燃油质量,εm为燃油结构质量比。超燃冲压发动机的比冲范围为900~1100m/s[25-26]。概念方案的L/D为4.8822,当设计指标航程R=7000km 时,按推进系统的比冲Isp=1000m/s(中等要求)计算,则燃油结构质量比εm需不小于0.792才可满足航程需求,即高超声速ISR 飞行器空重(不算载荷)必须小于7.56×103kg。对于高超声速飞行器来说,这个指标太高,很难实现。若把燃油结构质量比εm定为可行的目标值εm=0.5(对应空重为10.63×103kg),由式(3)可算得高超声速ISR平台可实现的航程为4419km。
目前,高超声速ISR平台可实现的航程4419km与需求航程7000km 之间还存在较大的差距(2581km),解决这个问题的可行途径有以下两个方面。
(1)提高技术水平
由Breguet航程公式(3)可知,要想提高航程,可从三个方面入手:一是提高超燃冲压发动机的比冲。在其他条件不变的情况下,把超燃冲压发动机的比冲由1000m/s 提高到1584m/s 即可满足7000km 的航程要求。二是进一步优化高超声速ISR 平台的气动外形,提高其升阻比。保持其他条件不变,把升阻比提高到7.7337也能满足7000km的航程需求。三是加强轻质高强度耐高温材料的研制,同时优化结构热防护设计,从而提高飞行器的燃油结构质量比εm,使之达到0.792。若能在上述三个方面同时取得突破,则高超声速ISR飞行器航程达到7000km是可以实现的。
(2)改变使用方式
在高超声速ISR 平台本身性能不变的条件下,通过火箭助推或大型运输机空中挂载的方式,可以大大扩大其作战使用范围。另外,把高超声速ISR 飞行器作为舰载无人机搭载于航母上也可以使其侦察范围覆盖第二岛链,此时航母需前出1000km。
4 结论
本文对高超声速ISR平台概念外形进行了初步设计,并采用数值计算方法对其气动性能进行了分析。主要结论如下:
(1)机体和机翼的设计方法对高超声速ISR 平台总体气动性能影响较大。乘波前体虽然给整个高超声速ISR平台的高升阻比特性打下了良好的基础,但机身中部和机翼的气动性能依然重要。只有机身各个部分均保持较高的升阻比特性,全机才能获得较好的气动性能。
(2)类乘波体飞行器在小于设计马赫数和设计高度的非设计状态下具有更高的升阻比。因此,在满足升力需求和推力限制的条件下,高超声速ISR 平台宜在略小于设计马赫数和高度的条件下进行巡航飞行。
(3)在目前的技术发展水平状态下,航程要达到7000km还很难实现。高超声速飞行条件下的升阻比屏障、比冲屏障和热障都是影响高超声速飞行器航程的关键因素,只有上述技术难点逐步得到解决,高超声速飞机才能真正走向实用。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
天津医科大学学报(2021年1期)2021-12-05
装备制造技术(2020年1期)2020-12-25
空间科学学报(2020年4期)2020-04-22
天津医科大学学报(2019年3期)2019-08-13
小哥白尼(趣味科学)(2018年5期)2018-06-21
现代检验医学杂志(2016年5期)2016-08-20
北京航空航天大学学报(2016年3期)2016-02-27
少年科学(2014年7期)2014-08-18