基于双模型的输电线绝缘子自爆检测算法
2022-07-29 06:17耿多飞
计算机与现代化 2022年7期
林 航,耿多飞,于 浩,胡 丹,张 可
(1.国网安徽省电力有限公司信息通信分公司,安徽 合肥 230002; 2.安徽大学电子信息工程学院,安徽 合肥 230601;3.安徽南瑞继远电网技术有限公司,安徽 合肥 230094)
0 引 言
输电线路是电力系统的重要组成部分,由于暴露在大气环境中,在长期运行中输电线路部件受温度、雷击以及风暴等影响难免会出现老化、缺失、损坏等问题。绝缘子串是用导地线悬挂起的多个绝缘子的总称,主要作用是保护导地线,并使导地线与其他器件和地面绝缘。绝缘子自爆缺陷对电力安全运行危害较大,绝缘子自爆原因也较为复杂,长期机械负荷过大、制造加工程序不严格、温度变化较大和绝缘子污秽等因素均会导致绝缘子自爆。因此对输电线路中绝缘子自爆缺陷精确检测并及时更换非常重要。传统方式主要为人工巡检模式,工作量大且易遗漏缺陷,并且巡检过程中,巡检环境也较为恶劣,易产生安全隐患[1-6]。
随着图像处理及深度学习技术的发展,基于图像的电力巡检逐渐成为电网建设的研究热点。Tan等[7]根据绝缘子的结构特点,提出了一种基于轮廓特征及灰度相似度匹配的融合算法,其主要是通过提取绝缘子串轮廓特征,采用计算每个绝缘子的间距距离和灰度相似性的方法,对正常绝缘子和缺陷绝缘子进行分类。危双丰等[8]针对绝缘子椭圆特性和绝缘子灰度梯度应一致的特性,提出了基于Hough变换的椭圆提取方法,这是一种通过对绝缘子灰度梯度变化是否一致判断绝缘子是否破损的规则。Zhang等[9]针对现有绝缘子自爆状态检测方法泛化能力不足和深度神经网络结构的不足,提出了基于随机配置网络和反馈转移学习机制的方法,提高了模型的泛化能力和检测精度。姜云土等[10]运用HSV量化特征直方图和LBP特征量直方图进行候选区域和邻域间的相似度匹配,提出了一种融合绝缘子形状、颜色与纹理进行识别绝缘子的方法,该方法成功应用到无人机巡检系统中。刘昶忻等[11]提出了基于深度可分离卷积网络MobileNetV2_SSD的航拍绝缘子目标检测方案,通过模型对航拍绝缘子的定位,在含故障绝缘子标签数据集上的定位精度达到了82.47%的平均精确率与81.07%的召回率。蒋姗等[12]提出了一种改进Faster R-CNN的绝缘子检测算法,该算法对比原Faster R-CNN网络,通过改进网络结构提高了平均准确率,且可以更有效地识别图像中更小比例的绝缘子目标。尧新亮等[13]提出一种针对绝缘子的目标检测跟踪一体化算法,由YOLO v3目标检测器与多线程ECO-HC单目标跟踪器结合组成。这些研究虽取得了一定进展,但由于单个绝缘子占整个绝缘子串比例小,这给基于无人机图像的绝缘子自爆缺陷检测带来了困难。
为了提高基于无人机巡检图像的绝缘子自爆缺陷检测的精度,本文提出一种双模型的检测方法。利用Faster R- CNN[14]算法检测并定位绝缘子串本体,再利用改进的YOLO v3[15]对自爆的绝缘子进行检测。为了提高绝缘子自爆缺陷小目标检测的精度,本文在YOLO v3的基础上增加了特征检测层,并采用K-means++[16]算法重新生成锚点框;针对收敛速度较慢的问题,采用CIoU Loss损失函数,该损失函数在训练中收敛得更快,从而加快收敛速度,提高性能,所以更符合本文数据集实际情况。
1 数据处理及算法改进
1.1 数据获取及处理
本文数据集源于中国电科院架空输电线路无人机巡检影像,所有绝缘子图像均由无人机拍摄,原始数据集共有835张图像。拍摄所用的无人机设备是大疆公司研发的大疆御2无人机。该无人机最大飞行高度超过100 m,重量较轻,可拍摄水平、垂直全景及360°全景照片[17-19],具有强大的数据传输能力和躲避障碍物能力,最大飞行距离也较之前有所进步,适用于高空拍摄输电线路,大部分图像分辨率为4680×2592或7360×4912。绝缘子串按照材质划分可分为玻璃、陶瓷和橡胶3种。本文数据集中绝缘子串缺陷均为自爆缺陷,自爆产生的原因为温差变化,在阴雨天气和电场同时作用下产生的绝缘子破裂现象。图1为绝缘子自爆数据集示例。
针对数据集图像较少的问题,本文使用数据增强方法扩充数据集。数据增强可以增加训练样本数量,提升模型鲁棒性。本文数据增强主要使用翻转(flip)和旋转(rotate)2种方式,翻转有3种方式,分别是水平翻转、垂直翻转和水平垂直翻转。单个数据样本经过翻转后,会生成3张按特定角度翻转的数据样本。而旋转是按照随机角度旋转方式,旋转后生成6张发生了不同角度旋转的数据样本。在使用上述方式处理后生成的数据集样本较原始数据集增加近10倍,一定程度上缓解了因数据较少而导致的精确度较低的问题,数据增强后的图像[20]示例如图2、图3所示。
1.2 基于Faster R-CNN的绝缘子串定位
目前基于深度学习的目标检测算法主要分为2类:一类是双阶段检测模型;另一类是单阶段检测算法。双阶段检测算法包括R-CNN[21]、Fast R-CNN[22]和Faster R-CNN等,此类算法的思路是:第一个阶段通过卷积神经网络提出候选框,第二个阶段对候选框进行判断分类,这是一个两阶段级联的网络。两阶段算法的优点是准确度高,但训练时间较长。单阶段检测算法以YOLO v1[15]、YOLO v2[23]、YOLO v5、CenterNet[24]和SSD[25]为代表,主要思路为:均匀地在图像的不同位置上密集抽样,抽样时可以采用不同的比例和长宽比,然后用卷积神经网络提取特征后直接分类与回归,经单个阶段的检测即直接得到最终检测结果。单阶段算法只有一次类别预测和位置回归,卷积运算的共享程度更高,因此拥有更快的速度和更小的内存占用。
Faster R-CNN算法由Ross B.Girshick于2016年提出,该网络分为卷积层、区域生成网络、池化层和分类4个部分。作为卷积神经网络目标检测算法,Faster R-CNN首先使用一组基础的卷积层+激活层+池化层提取图片的特征图,提取到的特征图被共享于后续区域生成网络层(Region Proposal Network layers)和全连接层(Fully Connected Layers)。区域生成网络用于生成区域(Region Proposals)的生成。该层通过Softmax判断锚点(anchors)属于前景(foreground)或者背景(background),再利用边框回归(Bounding Box Regression)修正锚点获得精确的建议窗口(proposals)。该层收集输入的特征图(feature maps)和建议窗口,综合这些信息后提取候选特征图(proposal feature maps),送入后续全连接层判定目标类别。利用候选特征图计算建议窗口的类别,同时再次利用边框回归获得检测框最终的精确位置。与R-CNN和Fast R-CNN相比,Faster R-CNN在检测速度和检测精度方面有显著提升,并且在区域提名检测算法里面的检测速度和精度均较佳。Faster R-CNN采用区域生成网络(RPN)代替原来的选择性搜索(Selective search),这种方法产生候选框的效率更高。
Faster R-CNN的整体结构较为简洁,其主要包含有融合特征提取、候选区域生成、位置矫正以及目标分类等4大部分。Faster R-CNN的主要结构如图4所示。
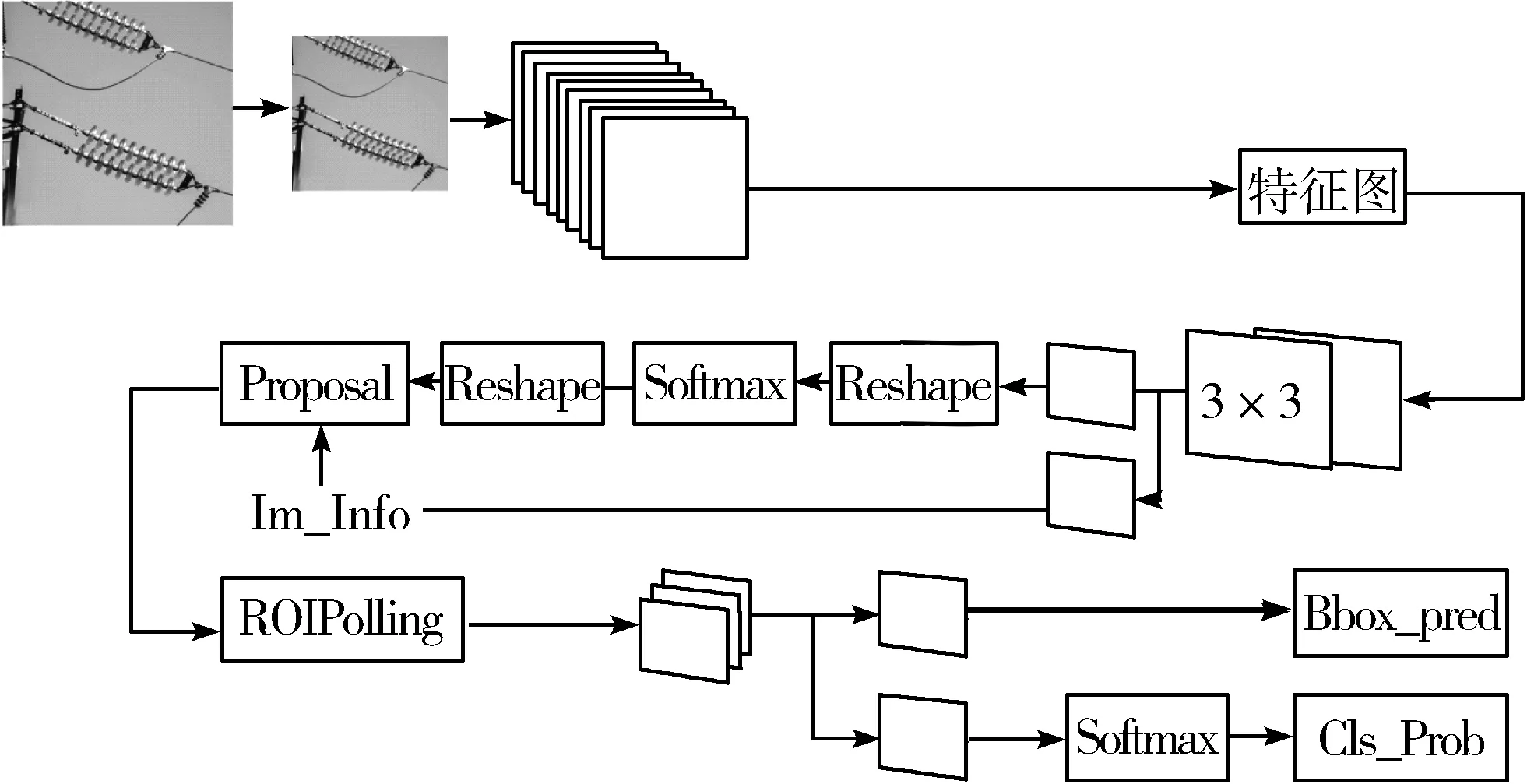
图4 Faster R-CNN网络结构图
1.3 基于改进的YOLO v3对绝缘子串自爆检测
YOLO v3算法为单阶段检测算法,单阶段类算法是在图像全局方面来进行边框(box)的回归与预测,利用的是端对端(end-to-end)的方法,具有训练和检测速度快的特征。单阶段类算法从整个过程来看,先利用多卷积提取图像全局信息,再利用全连接层进行候选框的预测和回归。
YOLO v3与YOLO v2相比增加了复杂度,并通过修改模型结构的大小来衡量速度与精度。YOLO v3主要改进预测尺度多样性,每种尺度预测3个锚点框(box),并提出了效果较佳的骨干网络Darknet 53。锚点仍然使用聚类的方式获得,得到9个聚类中心,将其按照大小均分给之后的3个尺度。由于本文所检测的物体均为小目标,为了提高检测准确性,本文借鉴FPN的思想,增加一个特征提取层,图像在经过2倍上采样后,输出的特征尺度由52×52提升至104×104,再通过route层将第109层与特征提取网络的第11层特征进行特征融合,以充分利用深层特征和浅层特征。4个特征尺度分别为:104×104、52×52、26×26和13×13。修改网络结构后的YOLO v3的网络结构如图5所示。
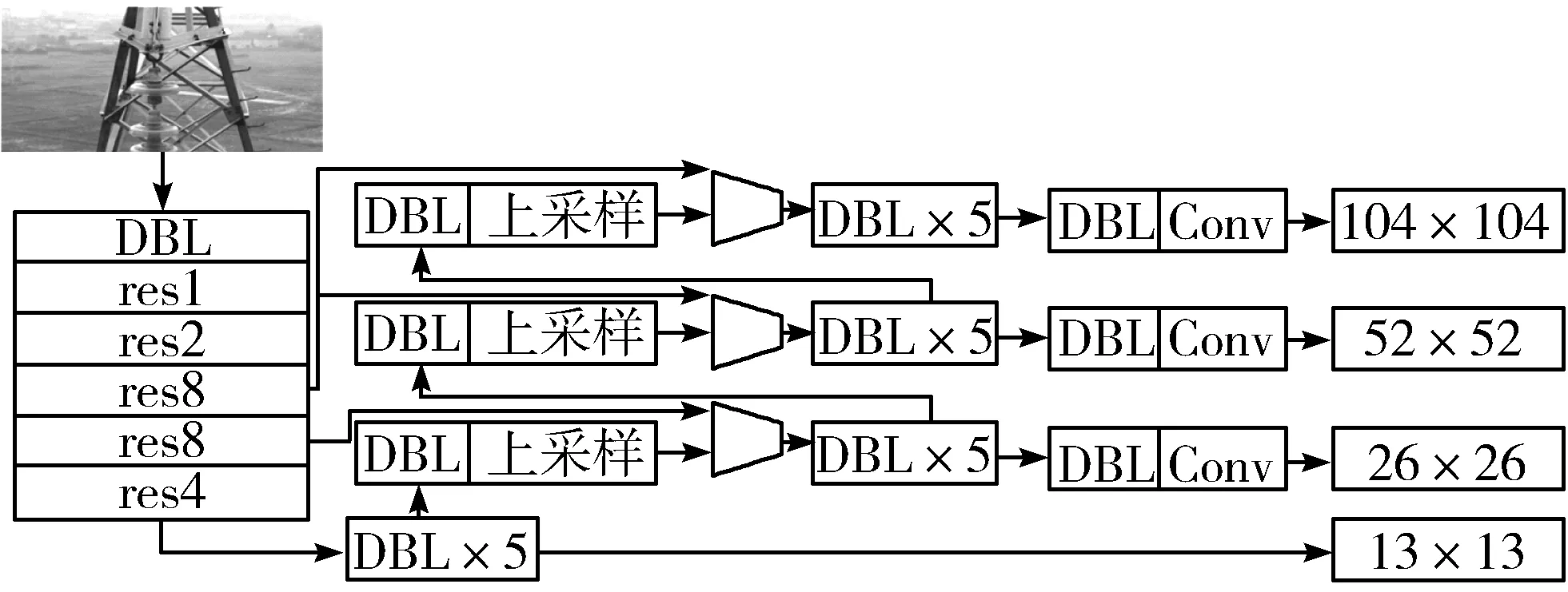
图5 修改后的YOLO v3网络结构图
YOLO v3为每种FPN预测特征图设定3种锚点,总共聚类出9种尺寸的锚点。在COCO数据集,这9个锚点是:(10×13)、(16×30)、(33×23)、(30×61)、(62×45),(59×119)、(116×90)、(156×198)、(373×326)。在最小的13×13特征图上由于其感受野最大,故应用最大的锚点框(116×90)、(156×198)、(373×326),这组锚点适合检测较大的目标。中等的26×26特征图上由于其具有中等感受野故应用中等的锚点(30×61)、(62×45)、(59×119),适合检测中等大小的目标。较大的52×52特征图上由于其具有较小的感受野,故应用最小的锚点(10×13)、(16×30)、(33×23),这组锚点适合检测较小的目标,而本文在增加104×104的特征图后,可以检测更小的目标。从图5可以看出,再增加一个特征提取层之后,分为4个分支,对4种不同尺度的目标分别进行处理,在原来3种尺度检测上精度又有一定提升。与此同时,由于端对端检测方法的直接性,YOLO v3的检测速度也明显快于区域提名检测的目标检测方法。
为解决预测框和真实框有时不相符合的问题,本文引入CIoU Loss损失函数。IoU的全称为交并比(Intersection over Union),计算的是预测框和真实框的交集和并集的比值,可以反映预测检测框与真实检测框的检测效果。IoU公式和损失函数公式如下所示:
(1)
LOSSIoU=1-IoU
(2)
上式中,A、B分别指真实框与预测框;IoU与LOSSIoU分别指计算出的IoU得分以及与之对应的Loss函数值。
在预测框和真实框不相交的情况下,仅从IoU数值上无法判断距离较近2个框之间的距离,这主要是因为根据定义,IoU=0,不能反映两者的距离大小(重合度);同时因为Loss为0,没有梯度回传,无法继续进行学习训练。为解决IoU无法反映出2个框到底距离有多远的问题,斯坦福大学提出了GIoU[26]。GIoU既继承了IoU的优点,又弥补了IoU无法衡量无重叠框之间的距离的缺点,但是当检测框和真实框之间出现包含的现象的时候,GIoU就和IoU是同样的效果。DIoU[27]考虑到GIoU的缺点,增加了C检测框,将真实框和预测框都包含了进来,同时DIoU计算的不是框之间的交并,而是计算的每个检测框之间的欧氏距离,这样可以解决GIoU出现的问题。CIoU则在DIoU的基础上增加了检测框尺度的Loss,同时在DIoU的惩罚项中加入了αv。这样预测框就会更加地符合真实框。CIoU的惩罚项公式和损失函数如下所示:
(3)
(4)
(5)
(6)
上式中,w与wgt分别指预测框与真实框的宽;h与hgt分别指预测框与真实框的高;b与bgt分别指预测框与真实框的中心点;ρ2(b,bgt)指预测框与真实框中心点的欧氏距离。c表示能够同时包含预测框和真实框的最小闭包域的对角线距离。
1.4 算法流程
针对无人机巡检图像中绝缘子自爆缺陷目标小而检测精度不高的问题,本文给出一种将Faster R-CNN和改进YOLO v3级联的双模型检测算法。首先使用Faster R-CNN将无人机图像中的绝缘子串检测出来,然后再利用本文改进的YOLO v3网络在绝缘子串图像上检测自爆缺陷,具体检测流程如图6所示。
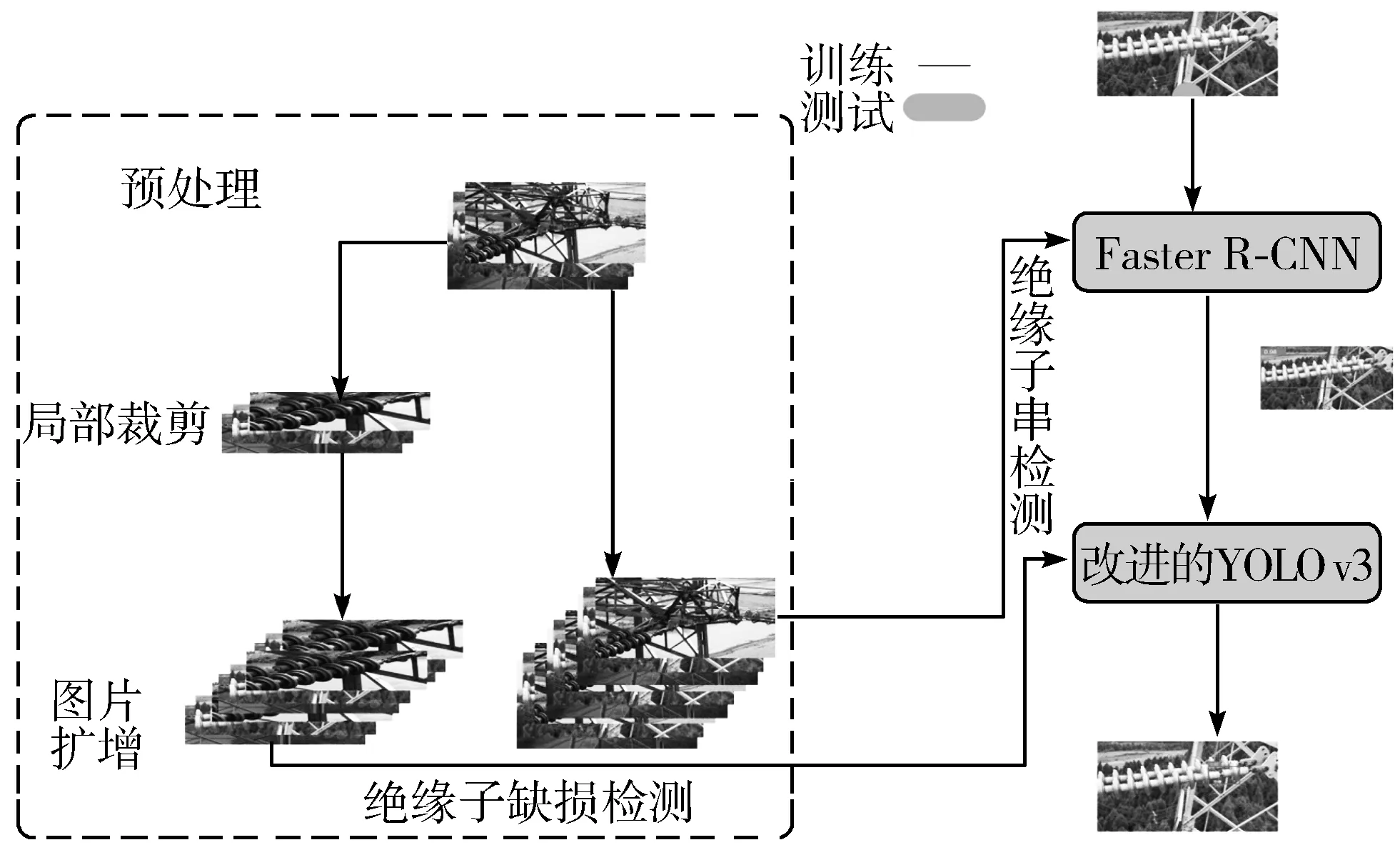
图6 绝缘子自爆级联检测方案
2 实验结果及分析
2.1 先验框设定
本文采用LabelImg软件标注数据样本,该软件由麻省理工学院计算机科学与人工智能实验室开发,标注完后生成的标注label文件为xml格式。本文对数据集按照7∶2∶1的比例,生成相应的训练集、测试集和验证集。
YOLO v3锚点由YOLO v3研究者通过聚类VOC公开数据集得到,VOC数据集包含20类目标,目标大到自行车、公共汽车,小到猫、鸟类,目标大小差距悬殊,其中部分锚点数据并不适用于本文数据集,且本文对YOLO v3算法进行改进后,原始的9组锚点也不再适用于修改后网络结构的YOLO v3算法。本文使用K-means聚类方法对YOLO v3生成新的12组锚点。图7是生成的anchor框的对比图。

(a) 算法原始锚点生成的标记框 (b) K-means聚类后生成的标记框图7 新旧锚点框对比示例图
由图7可知修改锚点生成的标记框较原始锚点生成的标记框准确,更贴近自爆目标,包含的无关背景较少。本文使用聚类算法生成新锚点框后,检测精度(AP)值提升约0.4个百分点。
2.2 网络训练参数设置
本文实验使用硬件配置和软件版本如下:Ubuntu16.04、Inter Core i5-7500HQ、NVIDIA Tesla P40 24 GB×8卡、内存256 GB+2 TB、CUDA版本10.2、CUDNN 版本8.0、Open CV版本3.4.2,基于Tensor Flow框架。初始学习率设为0.001,最终Loss值稳定在0.07。momentum设为0.9,weight_decay设为0.005。表1是设定的部分参数。
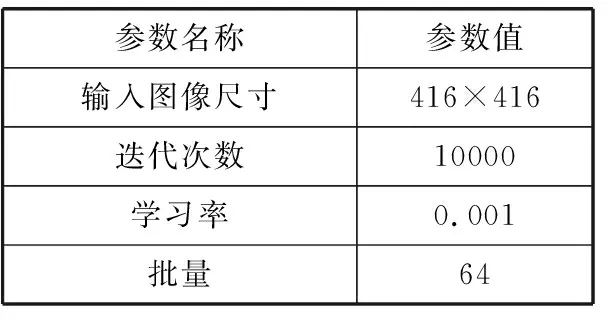
表1 网络训练部分参数
2.3 实验结果分析
首先,对比本文算法、Faster R-CNN、YOLO v3和本文单独对YOLO v3改进网络结构4种模型在输电线路绝缘子串检测中总体的精度结果,用平均准确度(mAP)值表示。
输电线路绝缘子串缺陷检测模型实验对比结果分析中,4种模型检测效果具体情况如图8所示。
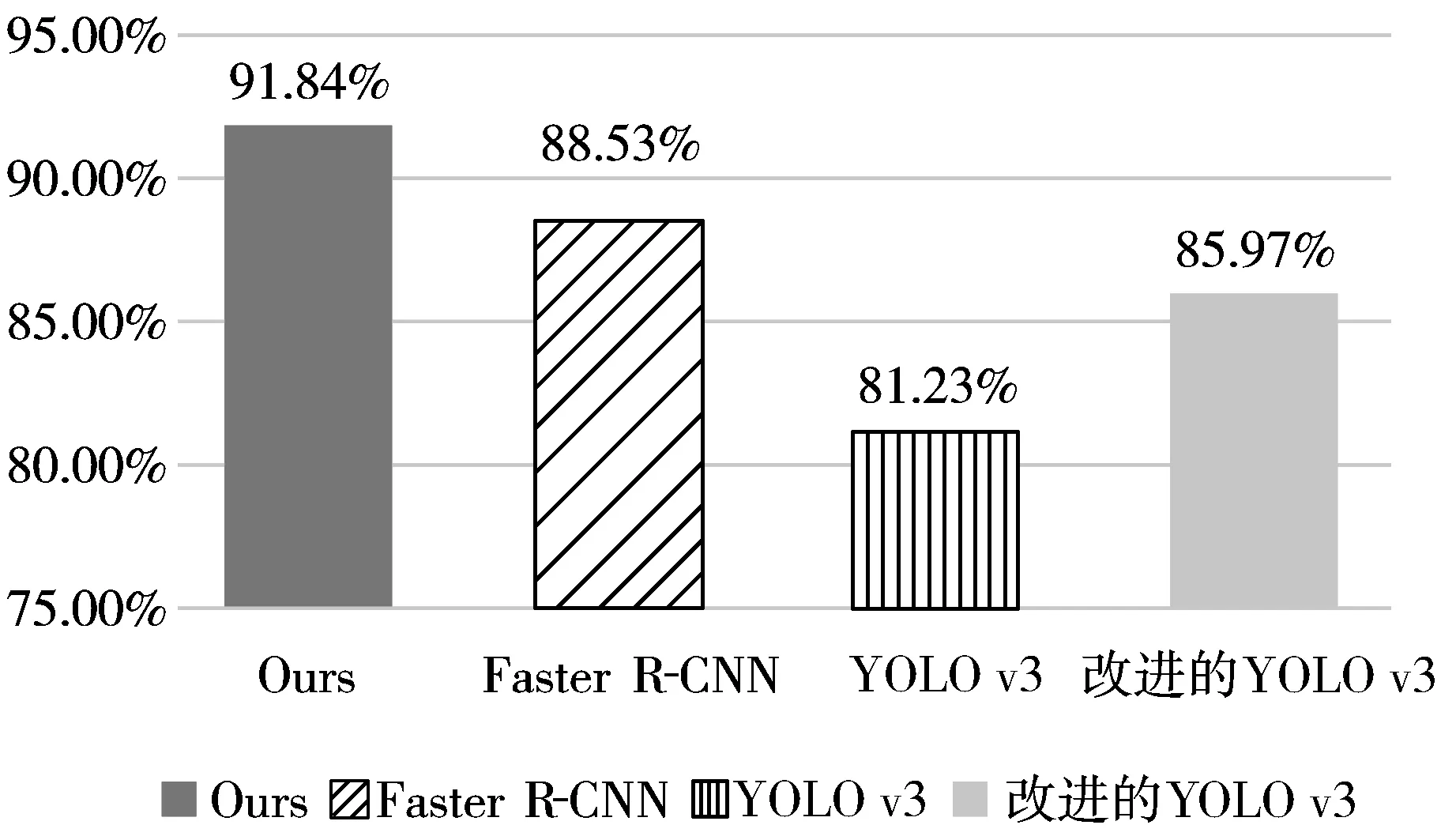
图8 输电线路绝缘子串检测模型检测对比图
从图8可以看出,在检测对比中,本文提出的方法mAP值最高,达到了91.84%,Faster R-CNN的检测效果紧随其后,达到了88.53%,两者差别比较小,这2种模型相对来说已经达到实际应用要求,只有YOLO v3模型的精度相对来说稍差。产生这种结果的原因主要是由于YOLO v3模型侧重于速度和精度2个方面的平均,因此相对于其他2种模型,YOLO v3的训练速度较快,但是精度一般。Faster R-CNN检测精度较高,但相比本文所用方法精度稍低。这表明本文所采用的方法在精度上比YOLO v3和Faster R-CNN均较高。
为直观表现本文算法、Faster R-CNN和YOLO v3这3种模型检测绝缘子缺陷具体效果,对具体图像进行检测,结果如图9所示。

(a) Ours (b) YOLO v3 (c) Faster R-CNN图9 输电线路绝缘子串具体检测图片对比图
由图9可以看出,本文算法在3种图像方面的检测方法中效果最好,无论是检测框的位置和数目都比较合适。Faster R-CNN的检测效果对目标较小的图像识别效果不佳,易出现漏检现象。YOLO v3虽检测到缺陷部位,但也出现误检现象,且在其他图像上的检测效果一般。
综上,本文算法的检测效果最佳,也极少出现漏检和误检现象,检测框的位置和数目相比其他2个模型也较好,Faster R-CNN与之相比精确度差别较小,并且也出现误检现象,而YOLO v3的优势在于速度较快,但精度比较低,所以实用性不佳。
由于绝缘子串有陶瓷、玻璃、橡胶3种材质类别,为探究绝缘子串材质对检测效果的影响,决定使用本文修改网络结构后的YOLO v3对3种材质绝缘子串做实验,3种绝缘子各使用相同数量的图像训练。最终检测效果如图10所示。

(a) 陶瓷 (b) 橡胶 (c) 玻璃
对3种材质的绝缘子串缺陷的检测效果如表2所示。
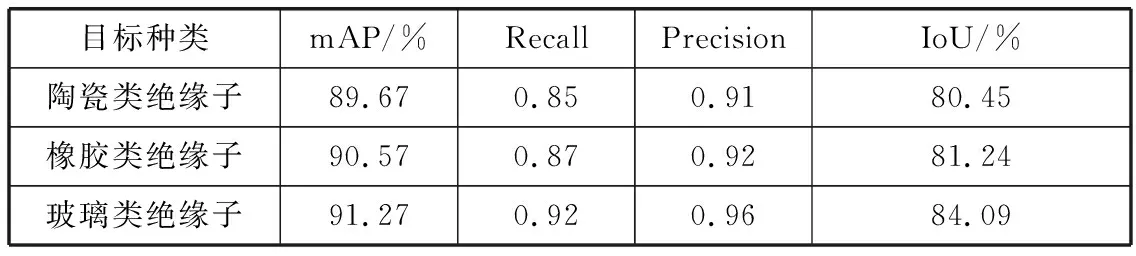
表2 3种材质绝缘子缺陷检测效果
最终检测结果如图10和表2所示。由表2可知,3种材质的准确度由高到低的顺序为玻璃类、橡胶类、陶瓷类。这可能是因为玻璃类绝缘子颜色较为明亮,所以被准确识别到的概率较高,且玻璃类召回率和精密度都显著高于陶瓷类和橡胶类绝缘子,橡胶类和陶瓷类绝缘子由于色彩较为黯淡,因而最终的准确度、召回率、精密度和IoU都显著低于玻璃类绝缘子串。
3 结束语
本文提出了一种双模型的绝缘子串自爆缺陷检测算法。该算法将Faster R-CNN和改进YOLO v3这2种目标检测模型进行级联,先利用Faster R-CNN检测绝缘子串,然后对YOLO v3通过添加特征融合层,用于绝缘子自爆缺陷的检测。对于自爆目标较小的绝缘子,本文提出的双模型检测算法精度较高,在所构建的无人机巡检绝缘子串数据集中取得了91.8%的平均准确度,优于Faster R-CNN、YOLO v3以及改进YOLO v3单模型的检测结果。
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
一重技术(2021年5期)2022-01-18
通信电源技术(2021年2期)2021-05-21
宁夏电力(2021年1期)2021-03-19
电子技术与软件工程(2020年22期)2021-01-30
数字技术与应用(2020年12期)2021-01-22
移动通信(2020年5期)2020-06-08
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年17期)2018-09-28