光-原子混合干涉实现加速度测量
2022-07-28 09:23于志飞陈丽清
华东师范大学学报(自然科学版) 2022年4期
方 波, 于志飞, 陈丽清
(华东师范大学 物理与电子科学学院, 上海 200241)
0 引 言
光-原子混合干涉仪[6-7]是本文小组在2015 年实验上实现的一种新型干涉仪, 它通过受激拉曼散射(SRS)过程实现了光-原子两个干涉臂的时空分离和干涉. 与传统干涉仪不同的是, 该干涉仪的两臂分别是光场和原子, 可以同时感知引起光场相位改变以及引起原子相位改变的物理量, 从而使该干涉仪可以灵活地运用于更多领域, 且原理上光和原子之间有量子关联, 干涉测量灵敏度能突破标准量子极限(SQL)[8-10]. 光-原子混合干涉仪对光相位的改变非常灵敏, 而光相位与光路传播中的反射镜的位置改变量成正比. 如果能够将反射镜的位置改变量与加速度联系起来, 这样就可以借助光-原子混合干涉仪来实现超越标准量子极限的高灵敏加速度测量, 为解决目前加速度测量所面临的精度瓶颈问题提供一种方法. 基于此, 本文设计了一种新型的加速度计—光-原子加速度计(ALA). 其基本构造:将1 个测试质量与反射镜结合构建1 个弹簧振子; 当平台加速运动时, 测试质量因为惯性产生1 个与加速度成正相关的位移, 该位移亦为光干涉臂传播路程变化, 因而可以通过干涉法测量相位来反映位移的大小, 继而确定测试质量的加速度大小. 下面, 将给出光场位移量与测试质量和加速度之间的关系式, 并对光-原子加速度计的测量灵敏度进行详细分析..
1 光-原子加速度计
1.1 光-原子加速度计实验原理图

1.2 光-原子加速度计理论
后续, 本文将计算理想条件下不同探测方法中光-原子加速度计的分辨率和测量范围. 考虑如图1(b)—图1(c)所示的三能级λ型原子系统, 原子的多普勒带宽与失谐大小相比可以忽略. 因此, 拉曼(Raman)系统的哈密顿量可以绝热表示为单频模式


图1 (a)光–原子加速度计的原理图; (b)、(c)受激拉曼散射的能级示意图Fig. 1 (a) Schematic of atom-light accelerometer; (b), (c) Energy level of the stimulated Raman scattering


整个装置通过第二次SRS 过程实现干涉仪的分束过程, 其输入输出关系具有相同的形式. 利用公式(2)—公式(6)可得最终的斯托克斯干涉信号

公式(7)中:

1.3 光-原子加速度计灵敏度分析

当相移的变化确定之后, 与其对应的加速度大小也就确定了.
相位的测量精度受到测量算符量子涨落的限制, 该量子涨落可以表示为


这样, 加速度精度可以确认为

2 光-原子加速度计灵敏度极限

在光-原子加速度计中, 因为第一次SRS 过程所产生的斯托克斯光场和原子自旋波之间具有量子关联, 即光场和原子波的各自能量起伏都比同等强度的激光大; 但是光场和原子波的强度起伏始终保持同步, 同时增大同时减小, 使得光和原子之间的强度差要小于同等强度激光. 这种关联使得干涉测量灵敏度可以突破标准量子极限的限制, 最终实现对加速度的超越标准量子极限的测量, 体现量子效应. 然而在实际使用中, 光场或者原子波在分束合束过程中的各类损耗都会引起光和原子量子关联的减小, 进而降低灵敏度. 灵敏度是否可以超越标准量子极限, 本文将在第3 章中详细讨论.
3 信号探测
在光学测量中, 经常采用强度探测(Intensity Detection, ID)、平衡零拍探测(Balanced Homodyne Detection)(业内常用零拍探测(Homodyne Detection, HD)表示)这两种方法. 本文考虑最简单的2 个增益平衡的情形, 即GR1=GR2=GR和gR1=gR2=gR. 干涉信号的强度不仅取决于斯托克斯光场的空间相位位φ, 泵浦场中的空间相位θP2-θP1也会改变干涉光束相位, 使其产生相移. 因此, 本文先设定稳定的情形, 即θP2-θP1=0 .
3.1 强度探测


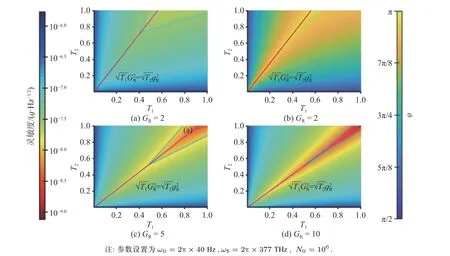
图2 (a)、 (c)、(d) 强度探测 GR =2,5,10 时, 两臂损耗和最佳加速度灵敏度函数示意图; (b) GR =2 时, 最佳灵敏度对应的空间相位Fig. 2 (a), (c), (d) The function diagram of optimal acceleration sensitivity and loss under intensity detection, at GR =2,5,10; (b) Spatial phase corresponding to optimal sensitivity underGR =2

3.2 平衡零拍探测探测

光-原子加速度计的测量灵敏度与初始粒子数和增益都有关. 在实际使用中, 初始粒子数和增益都受限于原子系统的作用原子个数. 由于原子个数的限制, 过高的种子光强会降低SRS 的增益, 对加速度灵敏度造成影响, 这样在初始粒子数与增益间就存在一种权衡. 目前光-原子混合干涉仪是基于Rb87 原子蒸汽池实现的, 原子池长度为7 cm, 半径为1 cm. 当原子蒸汽池在温度为75 ℃时, 原子密度一般为 1011~1012/cm3; 当激光作用半径为1 cm, 覆盖整个原子池时, 作用原子数目可以达到1013量级, 这样在保持相同的高增益 (GR= 10, 增益为100 倍) 情况下, 初始光子数可以达到 107~108量级, 与图3 (c) 结果相比, 可以提高加速度灵敏度接近10 dB. 在未来的发展中, 随着技术的不断进步,在相同拉曼增益下容许的初始光子数会逐步提高, 加速度的灵敏度也会进一步提升.
4 结 论
本文以光-原子混合干涉仪为基础, 设计了一种新型的加速度计—光-原子加速度计(ALA). 该加速度计基于干涉仪对相位的敏感性, 把对加速度的测量转化为对相位变化量的测量. 本文从理论上分析了在理想情况下, 该加速度计在不同种探测方法即强度检测和平衡零拍检测情况下的加速度测量灵敏度. 分析结果表明, 在两种探测方法中, 平衡零拍探测方法在测量精度上优于强度探测的方法.同时结果也表明, 无论是在无损条件下还是有损条件下, 本文设计的加速度计的灵敏度值都将超越标准量子极限, 这也是本文加速度计的优势之一. 本文加速度计的优势优势之二是, 在SRS 过程中, 由于产生的斯托克斯光场和原子自旋波的相位会自关联, 从而达到了相位自锁定的效果, 继而简化了装置, 保证了信号的相位稳定性, 提高了测量精度.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
电子与信息学报(2022年5期)2022-05-31
计测技术(2020年6期)2020-06-09
科学(2020年5期)2020-01-05
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
浙江大学学报(工学版)(2015年1期)2015-03-01