机车传动轴扭矩新型测量方法研究
2022-07-27 07:17:34中国铁路上海局集团有限公司科研所
上海铁道增刊 2022年1期
张 鼎 中国铁路上海局集团有限公司科研所
1 概述
扭矩是反映系统性能的物理量之一,是旋转机械动力输出的重要参数,是铁路生产是否达到安全标准的重要依据。但在铁路工作中,旋转机械测试环境往往存在空间狭小,振动干扰大等问题,传统的测试方法无从应对。且传统的扭矩传感器需切断或改造待测轴件的原有结构,这给计量检测工作带来较大的困难。
本文研究铁路系统扭矩新型测量方法,采用卡环式结构。通过理论分析,建立了卡环式机械结构的力学模型,并验证模型的正确性,从理论上分析了卡环结构的扭矩测试可行性;同时,提出了扭矩测试系统的设计方案,并结合新型电桥调平方法,提高系统的环境适应性。
2 卡环式扭矩传感器的力学模型建立及仿真
2.1 卡环式机械结构力学模型建立
为了建立卡环式机械结构的理论模型,以一侧卡环圆心为原点,建立了xyz坐标系如图1所示。
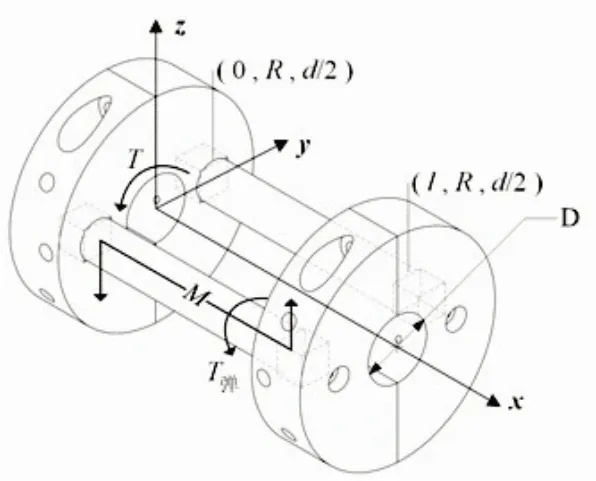
图1 卡环式扭矩传感器力学模型图
图1中,设右侧卡环固定,被测轴所受扭矩T通过左侧卡环传递给长为l直径为d的弹性体上,产生了弯矩M和扭矩Ts。被测轴与弹性体间的径向距离为R,被测轴的直径为D。当被测轴受扭时,左右卡环间的相对扭转角φ1和弹性体的扭转角φ2可以表示

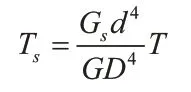
其中,G和Gs为待测轴和弹性体的剪切模量,IP和IPs为待测轴和弹性体的极惯性矩。由于被测轴、卡环及弹性体间没有相对位移,则φ1与φ2近似相等,因此可以得出:
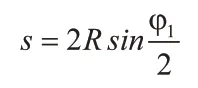
同样可以得出弹性体与左侧卡环连接处相对于右侧卡环的偏移量s为:
根据力矩平衡方程,弹性体所受的弯矩M可以表示为:
式中,E为弹性体的弹性模量,Iz为弹性体的惯性矩,w为弹性体的挠度;F为弹性体两端所受剪切力;t为观察截面在x轴方向的投影。对于上式的边界条件为:

代入边界条件,通过积分法可得:
因此,弹性体截面上的轴向应力σx、径向应力σy和剪切应力τxy可以表示为:
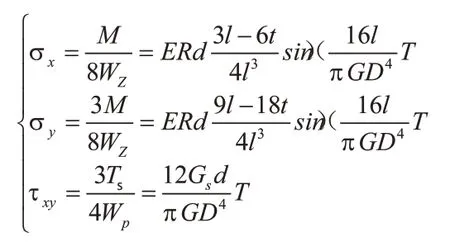
其中,Wz和Wp为弹性体的抗弯截面系数和抗扭截面系数。本式可以求得弹性体上任意点的受力情况。
2.2 卡环式扭矩传感器的力学模型论证及结构优化
为了验证理论推导的正确性,通过COMSOL 软件对卡环式机械结构进行有限元仿真[8]。将待测轴、卡环及弹性体设为整体,卡环材料设为铝,弹性体及被测轴的材料设为45#钢。在被测轴一端施加固定约束,另一端施加扭矩载荷,进行固体力学稳态分析。卡环结构的表面应力分布如图2所示。
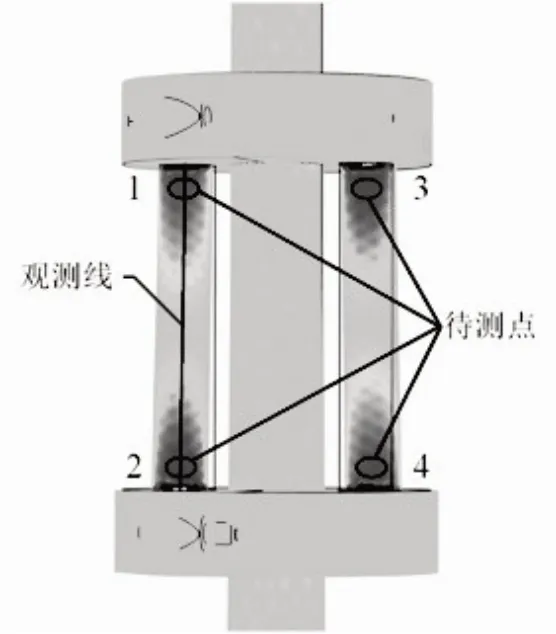
图2 卡环结构表面应力分布图
从图2 中可以看出,弹性体与卡环的连接处应力变化最明显,且两端应力符号相反。因此,可以在弹性体上找到两处或四处应变敏感元件安装位置,构成应变测量电路。拟选择的待测点1~4如图2所示。
为了验证理论模型的正确性,在弹性体表面轴向选择一条观测线,如图2所示。对观测线上各点的主应力进行计算,计算结果如图3所示。
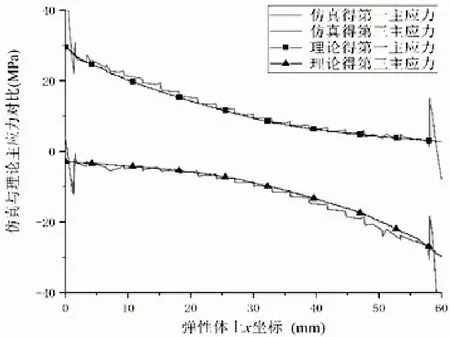
图3 仿真与理论计算的主应力对比图
由图3 可知,仿真计算结果与理论计算结果的重合度较高,证明了理论模型的正确性。模型网格的划分使得仿真数据呈锯齿状。在弹性体的两端,仿真数据均出现了明显的突变,经分析,由于卡环扭转过程中,弹性体边缘与卡环相互挤压,造成了边缘应力突变导致,不影响卡环模型的理论分析和计算。
通过COMSOL 分别对长度为60 mm,不同截面直径的弹性体以及截面直径为10 mm,不同长度的弹性体进行仿真,选择图2中的待测点1作为观测点,各参数下的扭矩-应变灵敏度如表1所示。

表1 参数对比表
弹性体的结构特性决定了扭矩传感器的性能,分析表中的数据变化规律可知,扭矩-应变灵敏度与弹性体的直径成正比,与弹性体长度成反比,这再一次证明了理论模型的正确性。
最后,综合整体尺寸、待测环境许用尺寸及安装需求,选择弹性体长度为60 mm、截面直径为10 mm 的卡环结构进行仿真,扭矩的变化范围为±100 Nm,计算可知:选择的待测点在扭矩测量范围内,扭矩和应变的变化关系是线性的,且各点间的应变大小相等方向相反,能够组成半桥或全桥的应变测试电路。因此,本文研究的卡环式扭矩传感器是可行的。
3 无线卡环式扭矩测试系统实现
3.1 系统总体设计
无线卡环式扭矩测试系统包含传感器前端模块、扭矩信号调理模块、电桥调平模块、数据采集及控制模块和无线模块。根据前述力学分析,将应变传感器布置在选定的待测点上构成了传感器前端模块,完成了扭矩-应变信号转换;扭矩信号调理模块包含增益可调的两级信号放大电路、滤波电路及零点偏置调节电路等,使信号更易于采集处理;电桥调平模块包含数字电位计、数模转换器及相应电路;数据采集控制模块和无线模块负责对调理后的扭矩信号进行采集、运算、无线收发及系统逻辑时序控制。
该测试系统主要分为硬件电路设计和电桥调平设计两大部分,本文主要介绍电桥调平模块的理论设计。
3.2 新型电桥调平模块的设计
本文选用半桥应变测量电路完成扭矩测试任务。设电桥由阻值均为R的两枚应变片及两个定值电阻组成,且两应变片为临臂,应变片间的电阻之差为ΔR。在静态条件下,由ΔR造成的电桥的输出电压误差ΔV为:
式中,Ve为电桥激励电压。Ve=3.3 V,其阻值为120±0.5 Ω。当ΔR为1 Ω 时,ΔV达到了6.8 mV,而扭矩信号仅为μV 量级,极大影响了测试结果,因此必须要对电桥进行调平。
要实现电桥平衡需使两应变片电阻阻值相等,但这种电桥调平电路影响测试精度,且容易造成短路影响可靠性。本文设计了包含应变片的可调电阻网络,可实现电桥的精细可控调平。电阻网络由R_strain 应变片电阻、Rr调节范围设置电阻、Rp档位细分设置电阻、R_DPOT 256档位双通道数字电位计组成的电桥电路构成。其中的一个通道作为扭矩信号调理模块中的放大增益控制电阻,另一通道作为电桥调平模块的调节电阻。应变片电阻R_strain 为120 Ω,设桥臂AB 两端期望的电阻调节范围为±2 Ω,经计算得Rp与调节档位数量的关系,如图4所示。

图4 档位调节电阻分布图
由图4可知,当Rp为2.8 kΩ时,四个区间的档位数较为均衡,分别为19、30、60、147。若将调解范围缩小至±1 Ω,则电桥调平模块的调节精度也会提高,可以根据实际情况来平衡调节范围和调节精度的关系。
当卡环式扭矩测试系统要执行测试任务时,将会执行电桥调平程序对当前的环境下的传感器前端模块进行修正,保证测试过程的测量精度。电桥调平程序先判断电桥是否失衡,若需要调节,则根据电阻网络公式和输出电压值计算数字电位计的理论输出值,并通过控制模块执行操作;然后再次测量信号调理模块的输出电压判断调整后的电桥输出是否达到设定精度。若没有达到精度要求,则搜索最佳的数字电位计输出值,实现电桥平衡调节。通常情况下,搜索5次以内即可完成电桥调平。
3.3 新型电桥调平模块性能仿真
根据上述电桥调平策略,在应变传感器自身误差为±2 Ω时,对补偿后的电桥输出进行仿真,并与未进行补偿的电桥输出进行对比,比较结果如图5所示。
由图5 可知,在应变传感器自身误差为±2 Ω 范围内,未补偿时的电桥输出电压范围为±15 mV,而补偿后的电桥输出电压在±0.2 mV内,输出误差减小70倍,表明该电桥调平模块对减小电桥输出误差具有明显的调节作用。
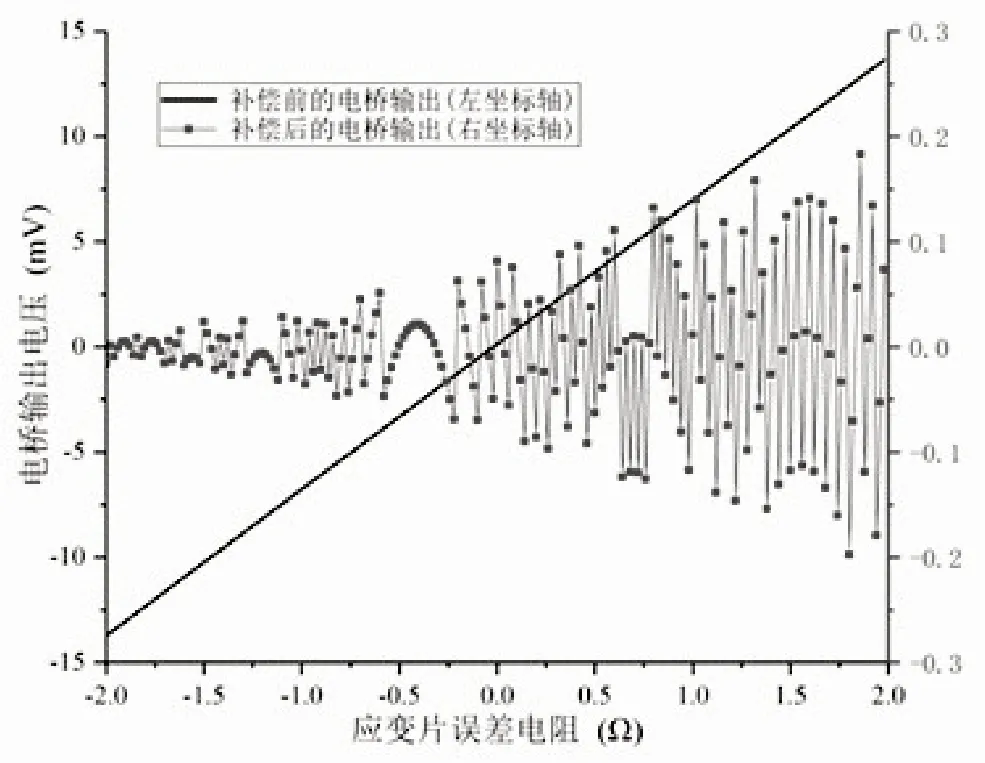
图5 电桥补偿前后输出比较图
4 结束语
本文研究的卡环式扭矩传感器具有安装方便、易于维护、无需破坏待测轴等优点,能够完成铁路系统转动轴类扭矩测量任务。建立的卡环式结构理论模型准确的描述了弹性体的受力变形情况,从原理上说明了该结构的可行性,有利于后续的研究及优化;提出的新型电桥调平方法具有调节精度高、结构简单、响应迅速等特点,适用于各种形式的铁路应变传感系统,能够提高扭矩测试系统的环境适应性。
猜你喜欢
科学技术创新(2021年16期)2021-06-26 08:25:40
中国民间疗法(2021年5期)2021-06-09 09:21:08
哈尔滨轴承(2020年2期)2020-11-06 09:22:34
机械工程与自动化(2020年4期)2020-08-25 02:06:58
传动技术(2019年4期)2019-05-20 09:48:32
森林工程(2018年4期)2018-08-04 03:23:38
创新创业理论研究与实践(2018年22期)2018-03-28 08:38:14
航天工业管理(2017年4期)2017-05-12 01:16:35
电测与仪表(2014年16期)2014-04-22 05:20:02
河南科技(2014年11期)2014-02-27 14:09:47