
V2X在智慧停车场景的相关技术研究
2022-07-27 08:59张博王嘉乐张欢
智能建筑与智慧城市 2022年7期
张博,王嘉乐,张欢
(天津中车机辆装备有限公司)
1 引言
近年来,随着经济的发展,居民可支配收入也大幅上升,由于工作或者生活的需要,购买小汽车已成为必然趋势。根据国家统计局2021年初发布的《中华人民共和国2020 年国民经济和社会发展统计公报》显示,截至2020 年底,全国民用汽车保有量28087万辆,比2019年末增加了1937万辆,民用轿车保有量15640 万辆,其中私人轿车保有量14674 万辆,比2019年末增加973万辆[1]。汽车保有量仍以较快速度逐年增长,随之而来的停车问题也愈加明显。目前,虽然我国停车位缺口巨大,但有大量的停车位并没有得到合理利用,这不但导致停车资源的极大浪费,还带来了城市“停车难”的问题[2]。
除了汽车保有量不断增加的原因以外,造成城市“停车难”问题的主要原因还有几方面:①车位供应数量无法满足停车用户的需求量;②各地区停车场的管理方式混乱,很多停车场中存在车位类型多、车位忙闲信息不透明、缺乏有效停车诱导等问题;③停车场的智能化水平偏低,运营管理效率低,影响车主停车体验度;④车主面临寻位难、找车难、排队缴费等情况,车辆经常在停车场出入口拥堵,进而引发连锁性的道路交通拥堵以及交通安全等各类问题。
虽然目前部分停车场通过智能化的改造手段,采用了车牌识别、车位相机、电子诱导等技术设备实现了停车收费、停车引导等功能,但并不能解决停车场外部的停车难问题。车主在驾车外出时,无法提前获知目的地周边的停车场资源分布、车位忙闲情况、停车收费标准等信息,致使车主驾车盲目寻找停车位,浪费时间且增加不必要的交通成本[3-4]。
要解决这些停车问题,仅仅增加车位的供给数量是不够的,还需要不断提高城市停车场的管理方式,提高城市的智慧停车运营管理水平。
智慧停车就是以城市内的各类型停车资源作为基础,将无线通信、物联网、高精度定位、云计算等技术综合应用,实现对停车位的信息采集、数据管理、定位导航等预务,实现停车位资源的联网化、信息化、系统化,实现停车位资源利用率的最大化、停车场利润的最大化和车主停车服务的最优化。
本文将车联网技术、无线通信技术和边缘计算技术相结合,通过智慧停车场管理系统与智能终端进行信息交互,再通过云端向车主推送车辆自动泊车过程中的关键信息,进而使无人驾驶功能的车辆实现AVP 一键泊车。本研究基于V2X 的智慧停车管理系统不但可以提高车辆在车场内的停车效率,还能减少车主寻找空闲车位所耗费的时间,进一步缓解城市交通拥堵,缓解城市“停车难”。
2 V2X智慧停车系统架构设计
基于V2X 的智慧停车系统主要包括有:智慧停车场管理系统、V2X 车载终端、车场硬件设备、车主移动端(APP)以及地图服务器这几个部分。通过建立智慧停车场管理系统、V2X车载终端、车场硬件设备以及地图服务器与车主移动端(APP)之间通过云端信息交互来实现停车信息管理,以及无人驾驶车辆实现一键泊车功能,为停车场提供了更加智能的管理方式,也为未来无人驾驶功能车辆的自动泊车提供技术路线设计。
1)智慧停车场管理系统
车场管理系统主要负责停车相关信息的存储、处理与转发,为车主提供停车场信息查询和空闲停车位情况查询、预约停车、正、反向的寻位、寻车导航,以及停车费的线上支付和电子发票申请等服务。
2)地图服务器
地图服务器利用地图引擎将釆集到的停车场车位数据生成车场地图,并发布成为地图服务,生成对应的URL(统一资源定位符)。通过手机移动端和PC端进行车位地图访问。根据车位状态信息,以附加不同的颜色表明每个车位不同的状态(占用/空闲/已预约)信息。
3)V2X车载终端
V2X 车载终端是车辆自动驾驶的核心设备,通过无线通信技术,实现车与车、车与人、车与路和车与云端的互联,以达到车辆协同控制、增强行车安全、提升效率的目的。
4)V2X路侧设备
V2X 路侧设备主要通过与系统平台、车载终端等进行信息交互,对车位状态、车辆状态及车辆位置信息等进行监控和上报。
5)车主移动端(APP)
车主移动端,主要是在手机端通过APP 的方式实现车主对车辆、车主对车场管理系统进行信息绑定和设置、车位信息查询、泊车管理、停车缴费以及申请发票等功能。
3 V2X 智慧停车系统“自主泊车”功能的实现
3.1 AVP方案部署组网
AVP(Automated Valet Parking)自主泊车功能,又叫自动代客泊车。车主在遥控设备上下发停车命令,车辆在接到命令后通过自动驾驶+自动泊车的方式,自动从当前位置行驶到停车场内停车入位。在整个泊车过程中没有人为参与,是无人驾驶的应用场景中非常典型的一个。
要实现自主泊车功能,需要场端—云端—车端实现“三端合一”,除了软件系统功能的支持外,还需要对车场端和车端进行一定的硬件设施改造,以满足AVP泊车的技术要求(见图1)。
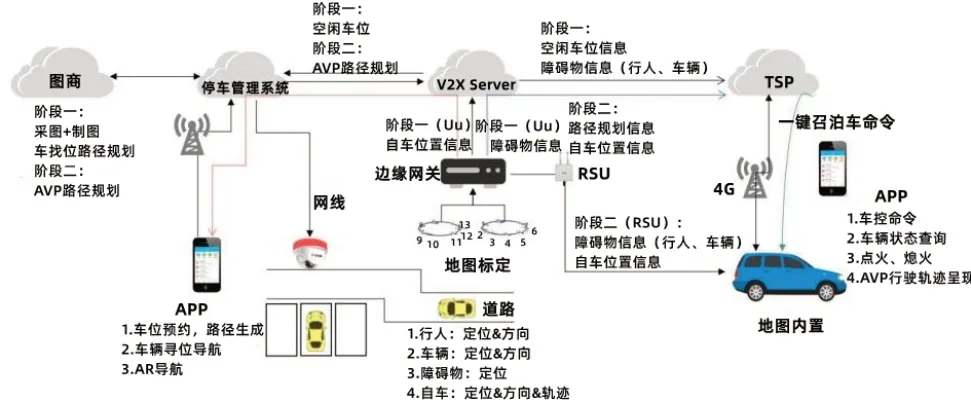
图1 AVP方案部署组网图
①需要具备高精度地图制作能力的运营商对停车场进行车位级精细化地图数据采集与绘制,车场路网数据生成,提供车辆实时路径规划并通过云端将全部数据下发到各端。
②车主在手机端根据车场发布的车位信息选择空闲车位,提出泊车请求,在得到车场应答信息后,利用车端无人驾驶功能,通过实时的路径规划,按照行驶路线自动行进到目的地车位完成车辆停放。
③通过车辆行驶沿途设置的边缘网关,结合现场安装的车位监测设备和车场感知设备对停车场环境进行全方位精确的检测,包括可用的停车位信息、周围障碍物信息、自动泊车过程中两侧车辆的位置监测、确认车辆当前位置、车身状态以及目标车位信息等,将信息实时回传至云端和车端,提高车辆自动驾驶过程中的安全性。
④云端服务器通过对车场发布的车位信息以及车主提交的停车请求进行处理,完成数据发布与各端之间的信息交互。
3.2 自主泊车功能的实现
自主泊车功能的实现主要可以分为:车辆进场前和车辆进场后两个阶段。
3.2.1 车辆进场前——场外车辆申请停车
1)场端
车场在系统平台进行信息注册,提交包括车场名称、地理位置、收费标准、开放时间、车位信息、精细化地图、路网数据等多方面的基础信息,并完成场内全部车场内车场管理设备、车位管理设备以及场内物联网感知设备等与云端服务器的系统对接,以实现车场内各项数据与服务器端实时的互联互通。在接收到车辆的入场请求后,车场端根据场内实时现状对车端请求进行应答,确定车辆预约入场是否成功,待接收到车辆AVP泊车请求后,予以应答并进入下一步。
2)云端
通过平台信息交互,完成车场及车辆的信息注册。在接收到车端提出的目的地车场停车请求以及AVP泊车请求时,验证各端信息的完整性和准确性,完成车端与场端之间的信息交互。
3)车端
车主首先在手机端完成相关个人及车辆的基本信息注册,车辆的车联网功能绑定和启用设置。在车主有停车需求时,首先通过手机端查询目的地停车场的车位信息并提交停车服务请求,得到停车场系统响应后进行需求确认,停车服务需求确认后提出AVP 泊车请求,得到应答后开启AVP 泊车,进入下一步。
3.2.2 车辆进场——自动驾驶一键泊车入位
1)场端
确认车端提出的AVP 泊车请求后,根据车场内车位忙闲状态,分配空闲车位,向车端下发车场内行进的路径规划及目标车位属性信息,在车辆在场内行驶时根据场内感知设备的信息回传,实时获得车辆的位置信息、场内的障碍物信息等数据,判断是否为车辆提供新的行驶路线或目标车位,直至车辆在场内完成泊车。
2)云端
从车辆进场到完成泊车的过程中,云端需要不断完成场端与车端的实时数据互通。向场端反馈车辆行驶的位置、状态;向车端下发车场路径规划及车辆行驶过程中,在车辆周围的障碍物信息,配合车辆完成避障,保证车辆可以顺利到达目标车位并完成泊车。
3)车端
AVP泊车确认启动后,首先确认车辆状态,向场端发出AVP 泊车请求,获得场端发出的行车路径规划及车位属性信息,车辆点火,启动AVP泊车开始向目标车位行驶,在行驶过程中,通过场内边缘侧感知设备实时获得反馈消息,包括车辆实时定位、沿途障碍物位置信息、路径校准等,直至到达指定目的地车位,完成泊车。
4 结语
不同于面向开放城市、高速工况的无人驾驶场景,在停车场内低速且无人驾驶的AVP 泊车应用环境相对简单,行人出入较少的车库对应自动驾驶系统发生事故的风险系数较小。可以说,AVP 泊车是自动驾驶商业化过程中最现实的路径之一。随着技术和市场的不断成熟,一级供应商以及新造车势力都开始行动,对自动代客泊车量产落地进行未来规划。虽然技术发展已经达到了一定水平,但在此技术大范围推广上,还存在一些技术难题有待解决。比如,如何实现停车场高精地图数据的快速绘制,如何通过低成本改造实现车场端的硬件技术改造,如何提高车辆在室内环境下的精准定位等。相信随着5G+物联网时代的快速发展,无人驾驶的商业应用场景将越来越多的出现在大众的日常生活之中。
猜你喜欢
消防界(电子版)(2022年19期)2022-11-16
汽车实用技术(2022年19期)2022-10-19
汽车实用技术(2022年7期)2022-04-20
汽车画刊(2020年5期)2020-10-20
铁路通信信号工程技术(2020年4期)2020-04-28
祝您健康·文摘版(2020年3期)2020-04-09
军民两用技术与产品(2020年3期)2020-04-07
科技视界(2018年11期)2018-07-31
现代家长(2018年11期)2018-01-05
科技资讯(2012年28期)2012-07-09
