基于双参数寻优车联网交通流量指数平滑预测
2022-07-26 09:30高洪波张登银
微型电脑应用 2022年6期
高洪波, 张登银
(1.江苏城市职业学院,科研处, 江苏,南通 226006;2.南京邮电大学,物联网学院, 江苏,南京 210003)
0 引言
近年来,随着我国民用汽车保有量几何级数式的增长,道路交通拥堵问题已呈现常态化,这种交通现状制约了社会经济的良性发展,而且还是空气质量下降的“元凶”之一。当前我国城市空气质量不尽人意,道路交通拥堵就是其重要缘由之一,其所造成的人力物力的浪费也是非常巨大的。
为了解决上述问题,近年来智能交通系统(ITS)成为了热点问题,而车联网又是其中的一个重要内容。车联网(Vehicular of Networks,IoV)有机融合了当前的物联网技术、大数据分析和云计算等多项技术[1]。车联网技术的应用,能够将汽车运营相关环境中的数据采集与处理设施加以整合,通过及时的分析处理,为改善道路交通状况奠定基础。车联网的实际应用已表明它能较好的改善交通状况,有利于营造快捷、安全、环保的道路交通环境,是实现智能交通的重要抓手与途径,智能交通系统车联网技术的应用,有效地降低了道路交通拥堵、交通事故率和能源消耗,可以起到激活整个交通路网运行状态的作用[2-3]。
在智能交通系统中,道路交通状态的动态预测是其中不可或缺的组成部分,其核心功能之一是实时、准确地进行短时交通流预测。基于车联网智能交通系统的实现,其中一个重要的问题就是短时交通流预测,它是交通管控的重要基础,其表现在实时性、高效性等方面的预测性能的好坏,将直接关系到交通管控的有效性。
短期、中期和长期是三种常见的交通流预测类型,道路交通的不同状况决定了交通流预测步长的差异[4]。例如,对于城市交通路网,因为实时性要求比较高而通常需要预测未来短时交通流状况,而短时交通流预测能够比较好地满足这种要求,这也是由城市交通管控的需求所决定的,因此如何提升短时交通流预测精度成为了相关研究的重点内容。文献[5]提出了一种自适应单指数平滑法,主要采用近似动态规划方法,依据交通流数据特征优选平滑系数,达到随预测过程自动更新的目的。文献[6]提出了基于长、短期结合的组合预测建模,即采用双指数平滑、傅里叶级数残差修正构建短期预测模型,长期预测则借助了马尔科夫模型。文献[7]针对城市轨道客流,提出了以小波分析去噪,再借助时间序列方法和神经网络法进行预测,上述方法相互结合得到最终预测值。文献[8]主要采用了三次指数平滑寻找预测最优平滑系数,以进一步提高预测精度。
虽然上述研究对短时交通流量预测有一定的借鉴和参考价值,但也难免存在着下述有待完善和探讨的问题。其一,一些方法过于繁复,计算量庞大,如文献[6]和文献[7]等提出预测建模方法;其二,一些方法在参数选择确定方面欠周全,如文献[8]提出的利用等距法寻找最优平滑系数,但未提及和研究指数平滑法另外一个重要参数—初值如何确定。
本文提出了一种基于双参数寻优的改进三次指数平滑模型,即按一定的步长逐次改变平滑系数和初值,以平均相对误差最小时所对应的平滑系数和初值为最优值,进而达到进一步提升预测精度的目的。
1 三次指数平滑法及其改进
1.1 概述
指数平滑法因其对中短期时间数据序列预测有着较好的精确性而被广泛应用于生产实践,该法最早由布朗提出,对于时间数据序列变化趋势而言,他提出了因其具有一定的规律性而能够被合理地顺延预测。指数平滑法就其基本思想而言,即是利用平滑系数和一定的初值将时间数据序列的差异加以弱化,通过对统计数据进行加权修匀来近似拟合数据的随机变动获得预测值。短期时间序列预测采用指数平滑法,因其简单易行、可靠性较高而在实践中得到广泛应用。指数平滑法又可分为一次平滑、二次平滑和三次平滑[9]。对于非线性变换的时间序列预测而言,三次指数平滑就其实质是在实施二次指数平滑的基础上进行再一次平滑处理,该法对时间数据序列变动状况为非线性的二次曲线趋势的情形较为适合,三次指数平滑法较之于其他指数平滑显现出更好的性能,但同时该法对平滑系数和初值的要求相对更高[10]。由于交通流时间数据序列动态变化趋势为典型的非线性形态,用三次指数平滑法进行预测具有相对的优势。三次指数平滑法的公式如下:
(1)
(2)
(3)

(4)
其中,m为步长,且:
由上面的公式可以看出,在进行三次指数平滑时,有2个关键的参数需要预先确定,即平滑系数α和初值,这两个参数的选取对预测精度至关重要,选取的合理与否直接关系到最终预测值的精度。
传统的三次指数平滑法通常是在预测之前预估平滑系数和初值,其具体方法如下。
(1)对于平滑系数的预估,如果时间数据序列变化形态比较平稳,则平滑系数应取小一点,如在0.1到0.5之间取值,其目的是使预测模型包含更多时间数据序列的信息;如果时间数据序列呈现较大的波动趋势,则平滑系数应取大一点,如在0.6至0.8之间取值,其目的是增加预测模型灵敏度,以便与数据变化趋势相吻合。
(2)对于初值的预估,当时间数据序列采录的数据较多,初始值对后面预测值影响相对较小,故此时可选取第一期数据作为初始值;如果时间序列采录的数据较少,初始值对预测值将存在很大的影响,此时一般以若干初期实际值的算术平均值作为初始值。
总之,传统的指数平滑法不论是平滑系数的选取,还是初值的确定都是按经验预估的,不可避免地存在着盲目性和随意性等问题,从而导致预测结果与实际值的偏差较大。例如,不恰当平滑系数α的选择和初值的确定,加之模型在预测的过程中不能自动适应数据的变化态势,必将导致预测结果和实际值之间误差越来越大。因此,有必要对传统的三次指数平滑法进行相应的改进以达到进一步提升预测精度的目的。
1.2 三次指数平滑法的改进
本文提出了基于双参数寻优的改进三次指数平滑法模型,其核心思想是使预测值与实际值间平均相对误差预测最小来确定平滑系数和初值,依据预测值和实际值的平均相对误差大小来判定取值的优劣,其目标是力争取得误差相对较小的作为理想值,以提高预测的精度。
三次指数平滑法两个关键参数—平滑系数和初值双参数寻优改进的思路是:首先确定平滑系数值,即采用等步长寻优法(例如步长0.01)进行搜索平滑系数α的最优值,寻优准则是使平均相对误差最小;然后基于上面得到的平滑系数值,依次选取前2个、前3个至前n个实测的时间序列数据值之和的算术平均值作为指数平滑法的初值,分别计算预测结果与实测值间的平均相对误差,取使平均相对误差最小时的算术平均值为指数平滑法的初值。其具体算法步骤如下。
Step1:选定实测历史时间序列数据集,设定步长 0.01,自0.1开始逐渐递增平滑系数α的取值,分别计算预测值与实测值间的对应的平均相对误差值。
Step2:直到当α所对应的平均相对误差值出现最小值时终止,该值即为所求平滑系数值。
Step3:以上面得到的平滑系数值为基础,依次选取前2个、前3个至前n个(n通常取值范围为2到8)实测的时间序列数据值,分别求算术平均值作为指数平滑法的初值。
Step4:分别计算上述每个初值对应的预测结果与实测值间的平均相对误差,取使平均相对误差最小时的算术平均值作为三次指数平滑法的初值。
Step5:取上述所得到的初值和α值作为三次指数平滑预测的最优初值和平滑系数。
2 基于双参数寻优指数平滑法的车联网交通流量预测仿真实证分析
2.1 时间序列数据的选取
以南京市某地2015年8月19日7:00至19:00的车联网实测车流量数据作为仿真对象,该路段为城市交通区域主干路段。车流量数据采集方式为每隔半小时采集一次,共采集24次,这里用1至24序号对应每个采集时间段,具体车流量数据如图1所示。
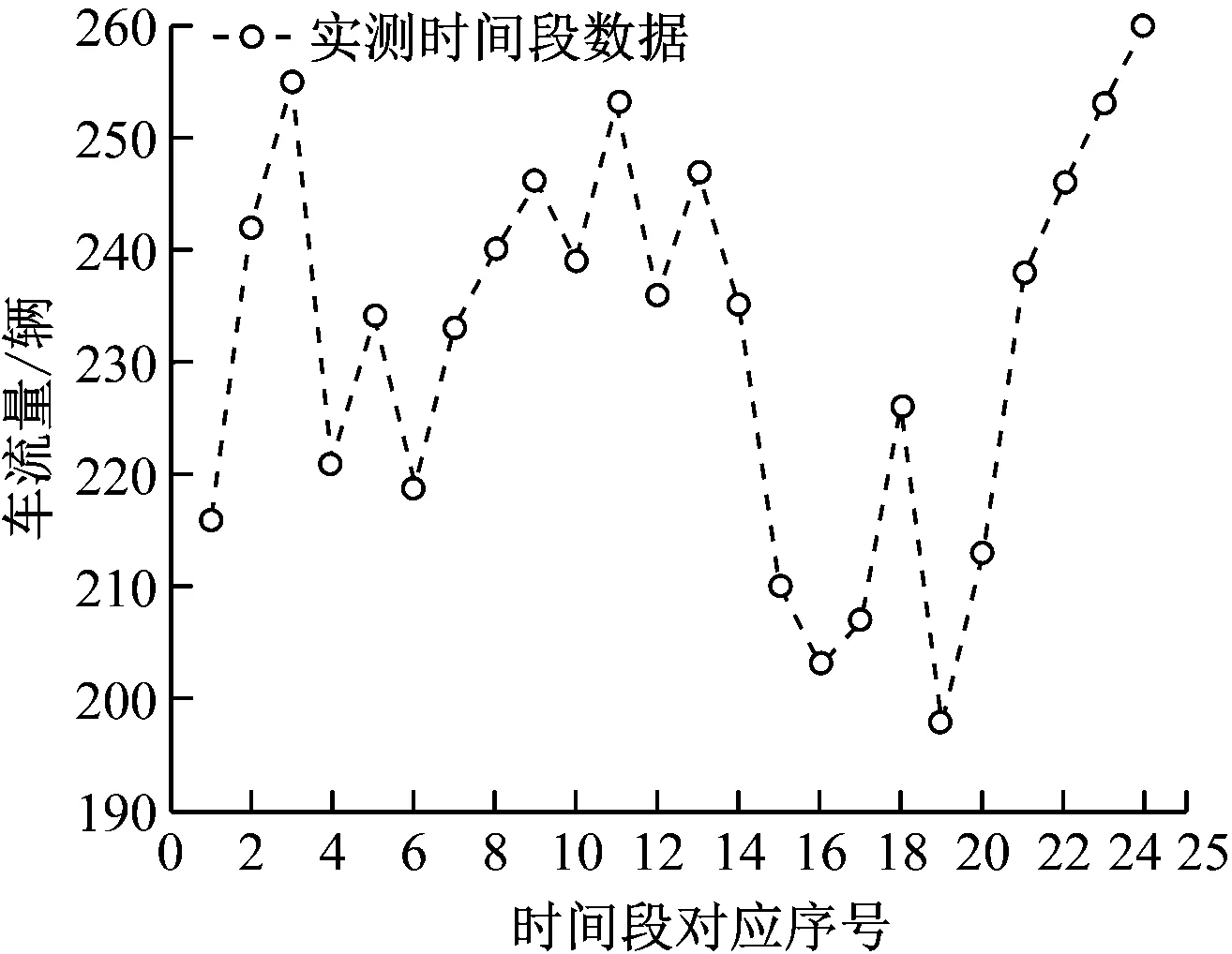
图1 路段实测时间序列数据
2.2 平滑系数α的确定
按本文所提出的改进的三次指数平滑法,首先确定平滑系数α值,即可得到当其值为0.3时,三次指数平滑法的预测值与实测值间的平均相对误差最小,具体可见表1。表1列举了平滑系数自0.25按步长0.01递增的局部数据示例,表1中α表示选取的平滑系数,T1表示对应于平滑系数的相应平均相对误差,从表中可以看出当平滑系数取0.3时预测结果最佳。综上所述,平滑系数的取值不同,对应的三次指数平滑预测的精度有所不同,由实际数据推算可以发现,该法预测精度并不随平滑系数的递增或递减而逐渐提升或下降,本文采用选取平滑系数一定的变化区间,按一定步长递增选取平滑系数,通过比较取平均相对误差最小得到最优的平滑系数的方法具有较好的有效性和可操作性。

表1 平滑系数的选取
2.3 初值的确定
取前3个至前8个实测值作和,并分别求其算术平均值,经计算可以发现,当初值取前6个实测数据值(n=6)的算术平均值时,指数平滑预测值与实测值间的平均相对误差最小,见图2。
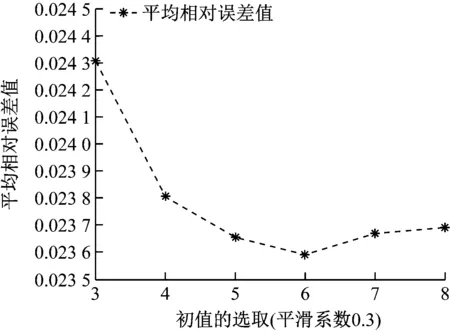
图2 选取前3至8个数据均值对应平均相对误差
2.4 改进后的三次指数平滑预测结果与实测数据拟合效果
选取上述确定的最佳平滑系数0.3和前6个实测数据之和的算术平均值作为初值进行预测,得出的预测结果与实测数据点间拟合图如图3。从图中可以看到,预测的结果是十分理想的。
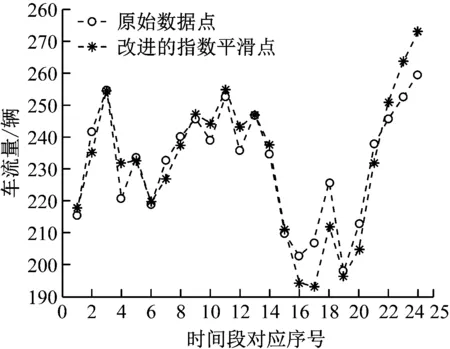
图3 预测值与原始实测值拟合对照
2.5 三次指数平滑模型的改进模型与传统模型预测结果的精度比较
为了进一步验证本文所提出的改进的三次指数平滑法的优势,计算它们各自预测结果的平均相对误差,如表2。表2中,α,n分别表示平滑系数和初值选取时间数据序列前几项的个数,T1表示对应于不同的α,n值的相应的平均相对误差。
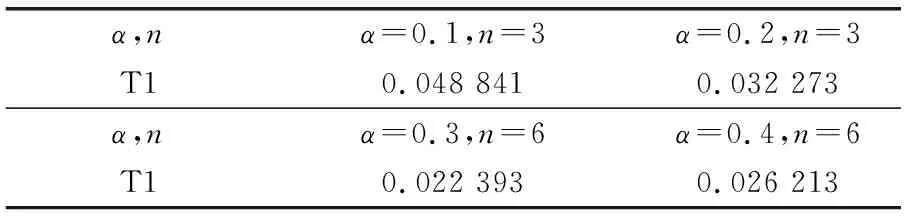
表2 改进模型与传统预测模型间的比较
由表2可以看出,当平滑系数自0.1递增至0.4时,平均相对误差从逐渐减小到开始增大,即预测的精度从逐渐提升到后来下降,这个过程中存在着一个拐点,这个拐点即是我们最终需要的双参数值。综上所述,改进后的三次指数平滑预测模型(α=0.3,n=6)与通过预估平滑系数和初值的传统指数平滑法预测相比,平均相对误差最小,这进一步说明了本文提出的基于等步长双参数寻优的三次指数平滑改进算法较之于传统的指数平滑法的精度更高,可以有效地避免传统指数平滑法由于平滑系数和初值这两个关键参数预估的不确定性而导致的预测结果出现较大误差。
3 总结
车联网技术的兴起为智能交通系统建设和解决日益严重的交通拥堵问题提供了良好的解决途径[11-12]。本文针对车联网智能交通系统其中的一个核心问题——短时交通流预测,提出了一种基于双参数寻优的改进三次指数平滑预测模型,最后依据实测交通流量时间数据序列,对本文构建的预测模型进行了实证分析,结果表明本文提出的模型较之于传统三次指数平滑法模型在精度方面得到了较大的改善,有效避免了由于相关参数的预估不准而导致预测的盲目性,并且该算法便于计算机编程实现,符合建模可操行和高效性等原则。
当然,随着车联网技术的迅猛发展,短时交通流预测领域仍有待突破性的研究,本文研究重点在于算法的改进,虽然本文提出的预测模型对短时交通预测有一定的借鉴参考价值,但由于道路交通状况是一个非常复杂的非线性动态过程,实际的交通流量还会受到天气变化,交通事故等突发情况的影响,因此难免存在着一定的局限性。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
今日农业(2021年19期)2022-01-12
沈阳理工大学学报(2021年6期)2021-12-30
电子产品世界(2021年6期)2021-02-10
中国现代医生(2020年2期)2020-04-09
计算机系统应用(2019年6期)2019-07-23
债券(2016年11期)2017-01-12
证券市场周刊(2016年17期)2016-05-10
现代电子技术(2009年15期)2009-09-30