带倒车功能的水上救援机器人控制系统的设计
2022-07-25 12:39:54周军
延安职业技术学院学报 2022年3期
周 军
(九江职业大学,江西 九江 332000)
引言
无论是在游泳馆、海边等公众场所还是河边池塘等有水的地方,发生溺水死亡事件数不胜数,经专业人士分析,一般人在溺水后2-3分钟左右就会停止呼吸,且在缺氧情况下5分钟左右就会导致脑细胞的死亡。如能在刚停止呼吸的4-6分钟之内进行心肺复苏等急救措施,其成活率比较高。
目前很多公众场合还是采取救生员或者水中放入救生圈的方法进行安全管理,其缺点是人工可能会错漏救援信息,且其救援速度慢,易错过最佳救援时间。如遇恶劣天气还会加大救生员的危险系数。而水上救援智能机器人实现了自动救援功能。
现在的水上救援机器人只能遥控运行到目标点,如果超过目标点则需要绕一个圈掉头重新进行定位,浪费了救援时间,故在现有水上救援机器人系统中加入倒车系统,可以为应急救援赢得更多的时间。
一、控制系统硬件结构
带倒车功能的水上救援机器人的控制系统硬件主要由主控电路板、执行机构和视觉相机检测装置组成。主控电路板包括:电源整流装置、控制器检测信号和输出信号接线;主控制器采用树莓派Raspberry Pi 4B;执行机构有直流无刷电机作为动力电机,三相混合式步进电机作为方向控制电机;视觉相机检测装置主要采用Raspberry Pi Camera Module 2 NoIR视觉相机和通讯模块,视觉相机安装在救援机器人前端,通过视觉技术实现实时监控水面情况的功能,再通过通讯模块将信号反馈。
二、控制流程图设计
采用机器视觉技术实时监控水面情况,将是否有溺水事件进行反馈,信号反馈到控制中心和遥控装置两处。遥控装置方便操作人员手动确认目标点是否正确,若确认错误则取消救援行动,若确认正确或规定时间未确认则控制中心默认正确,机器人立即规划达到目标点的多段直线子路径。机器人打开方向电机,按照第一个子路径调整运行方向,启动动力电机控制螺旋桨运行至第一个方向。在运行过程中实时判断是否出现新的障碍物,关闭动力电机,重新规划路线,调整方向运行至新路线。完成当前子路径后判断是否有下一段子路径,如有则调整方向继续前进,直到完成所有子路径路线到达目标点。在运行过程中由于速度过快发现超出目标点时,调整方向电机,开启动力电机控制螺旋桨进行倒车,快速到达目标点。检测到溺水者攀附在救援机器人上,等待一段时间后救援机器人规划返航到指定安全位置的路线,与前面救援流程类似,同样调整方向电机,启动动力电机按照子路线返航。返回过程中遇到新障碍物则重新规划路线调整方向电机,直到完成所有子路径达到安全位置。控制流程图如图1所示。

图1 控制流程图
三、电路原理图设计
整个系统采用树莓派Raspberry Pi 4B 作为主控制器,电源整流装置经过滤波整流后将直流5V电源供给主控制器,将直流24V电源供给直流无刷电机(动力电机)和三相混合式步进电机(方向控制电机),利用Raspberry Pi Camera Module 2 NoIR 作为视觉相机,通过视觉技术判断是否有待救援人员。2.4GHZ的射频模块作为通信模块,是一种远程的控制方式,可以实现2400M-2483MHZ范围内的点对点近距离无线传输通信,其使用方便,可以短距离传输。电路原理图如图2所示。

图2 电路原理图
四、树莓派和PWM的控制
(一)PWM控制
直流无刷电机具有不易磨损、出故障概率低、性能可靠、寿命长、启动转矩高和机械特性好等优点,作为水上救援机器人的输出电机,性能稳定且调速方便。脉冲宽度调制(PWM,Pulse Width Modulation)用于直流无刷电机的调速控制是一种简单高效的方式。
脉冲宽度调制(PWM)利用控制器的数字输出信号对直流电源开关频率进行控制,从而改变直流无刷电机负载两端的电压,以此来达到调速的效果。
(二)树莓派对PWM的控制
本系统利用树莓派的ARM Cortex-A72嵌入式芯片作为CPU 单元。树莓派自身的库里提供了PWM功能,因此利用GPIO的编程就可实现PWM控制。基础代码详解如下:

五、机器视觉控制
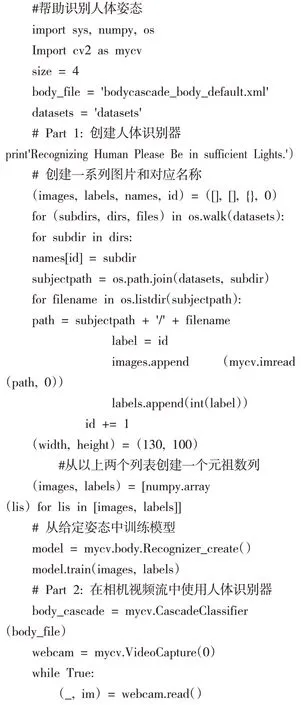
机器视觉相机与树莓派控制器相连,通过LBPH局部二进制模式直方图算法来提取人的身体特征,使用以下4个特征参数:
特征参数1:像素半径,用来创建圆形局部二值模式并表示中心像素区域的半径。
特征参数2:Neighbors,用来创建圆形局部二进制模式的样本数。
特征参数3 和4:Grid X 和Grid Y,水平和垂直方向的单元格数。
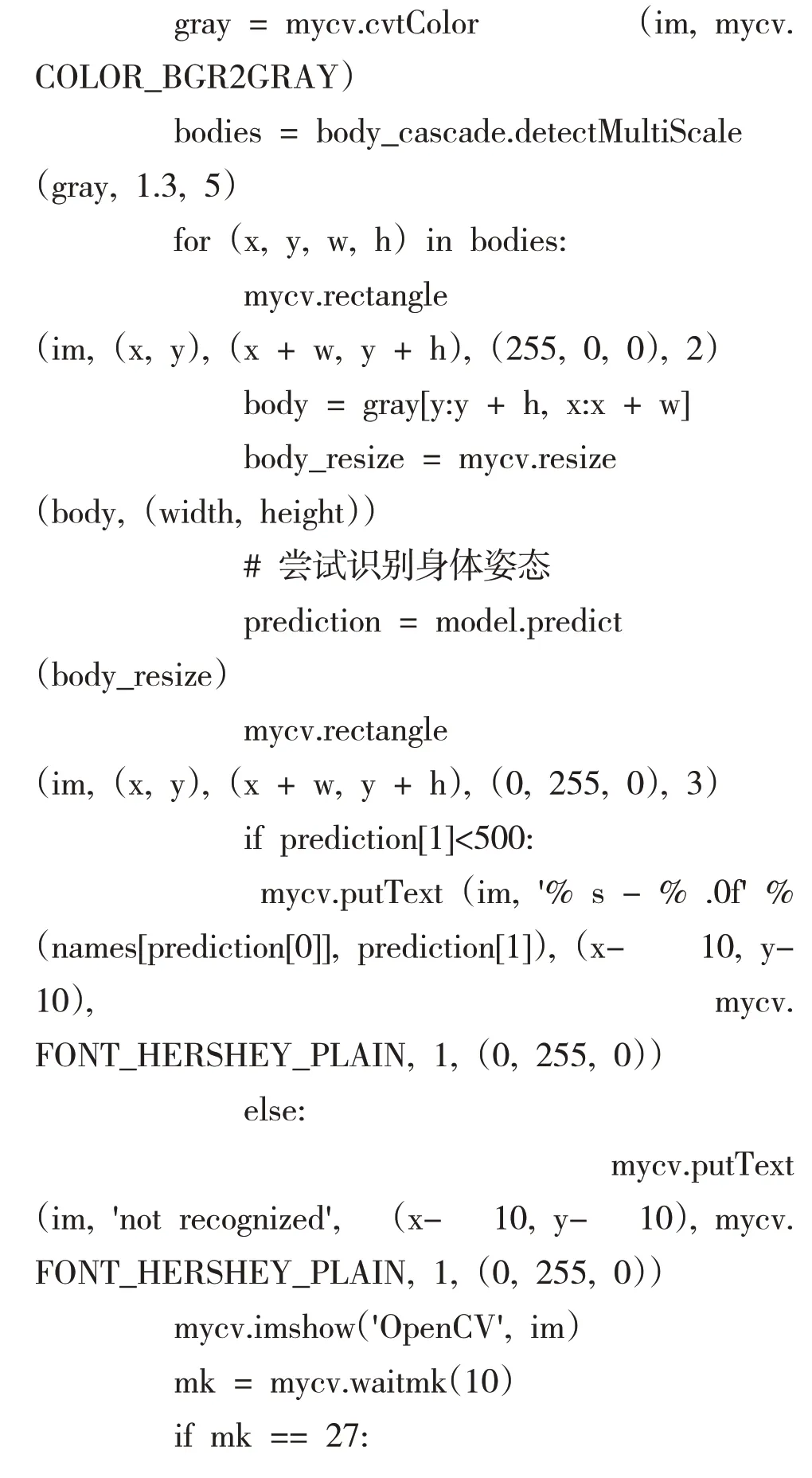
用各种人体姿态进行带标签训练,后获取测试数据,确定哪些标签为正常姿态标签,再对水面所有人员进行实时监控,对应带正常标签数据的则确定为正常,否则确定为异常。

六、实验结果
该系统研制出一款新型的充气式高效救援设备,对落水人员快速施救时,救援人员可以直接手持遥控器驾驶或者在岸上通过手持遥控器控制救援机器人下水施救,该设备携带轻便,气囊可储存在拉杆箱中,展开时间仅为20 秒,纯电驱动,8KW 功率,25KG推力,最快速度可达30公里/小时,可在波浪中稳定转弯,抗风浪行进,急速倒车,最大载重量为160KG,机器人可同时救起7名落水者。
带有倒车功能的水上救援机器人能够通过机器视觉控制识别救援信号,准确快速到达目标点,节约了人力资源,同时提高了水上救援成功率。经过多次实验和后期不断改进机器视觉的算法,以期提高识别率,从而提高救援的准确性。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:33:32
中国特种设备安全(2021年5期)2021-11-06 05:09:00
装备制造技术(2021年4期)2021-08-05 07:39:54
电子制作(2019年11期)2019-07-04 00:34:32
电子制作(2019年10期)2019-06-17 11:45:00
制造技术与机床(2017年11期)2017-12-18 06:46:39
电子制作(2017年17期)2017-12-18 06:40:43
中国酿造(2016年12期)2016-03-01 03:08:19
电测与仪表(2015年7期)2015-04-09 11:40:04
电机与控制应用(2015年7期)2015-03-01 03:50:10