B737NG飞机前轮转弯系统故障分析
2022-07-12 11:13:22李强
设备管理与维修 2022年7期
李 强
(昆明航空有限公司,云南昆明 650206)
1 故障现象及排故措施
(1)故障现象。脚蹬无法控制前轮转弯。
(2)排故措施。某日航后依据AMM32-51-00检查前轮转弯系统钢索,钢索NWS-A和钢索NWS-B张力均在手册范围内。检查前轮转弯系统控制手轮有磨损;检查前轮转弯旋转作动器正常;检查前轮,转弯钢索无磨损、无断丝,无其他机构干涉。依据AMM32-51-41更换前轮转弯控制手轮,测试前轮转弯系统工作正常。次日航后依据AMM32-51更换前轮转弯控制手柄垫圈,操作测试前轮转弯系统工作正常。
2 前轮转弯系统
在了解故障现象的情况下,为了更好地找出影响系统正常工作的原因,应该对前轮转弯系统的工作原理有所了解,从而准确判断出可能存在故障的部件或原因。
2.1 部件组成
前轮转弯系统部件由两部分构成,即驾驶舱部件和前起落架轮舱部件(图1)。驾驶舱部件主要由备用前轮转弯电门、转弯手柄(手轮)和控制钢缆等组成。前起落架轮舱部件由控制钢缆、方向舵脚蹬转弯机构、方向舵脚蹬转弯旋转作动筒、总结机构、转弯计量活门组件、两个转弯作动筒和前轮转向筒等组成。

图1 前轮转弯系统
2.2 工作原理
当飞机在地面,前起落架减振支柱被压缩时,转弯手柄(手轮)或方向舵脚蹬给前轮转弯系统提供输入信号,转弯手柄(手轮)偏离手轮中心线上下移动或者方向舵脚蹬移动时,通过控制钢缆回路到达转弯计量活门组件,再由总结机构生成一个输入信号,来推动转弯计量活门,使液压系统压力油到达前轮转弯作动筒从而产生力,使转弯作动筒产生转弯载荷(图2)。前轮转向筒通过上下扭力臂和前起落架减振支柱内筒传递此转弯载荷,到达前起落架机轮,来转动前起落架机轮,从而达到前轮转弯的目的。

图2 前轮转弯液压系统
通常情况,前轮转弯的压力来自前起落架放下压力,由液压A系统向前轮转弯系统提供压力。当A系统压力失效时,利用备用前轮转弯电门人工控制起落架转换活门,起落架转换活门通过备用前轮转弯电门移动到备用位置。起落架转换活门将前轮转弯的液压源由液压A系统转换到液压B系统。
2.3 操作原理
移动转弯手柄和脚蹬对前轮转弯的角度有所不同,转弯手柄使前轮转动的最大行程为78°,而脚蹬使前轮转动的最大行程为7°,并且脚蹬只能在地面前起落架被压缩时,才能实现转弯的功能(图3)。当飞机在空中时,方向舵脚蹬转弯旋转作动筒断开方向舵脚蹬的输入信号;在地面时,转弯手柄和方向舵脚蹬均可对转弯系统进行操作。由于转弯手柄直接通过控制钢缆到达转弯计量活门组件,因此转弯手柄通常情况下可以超控方向舵脚蹬的输入。
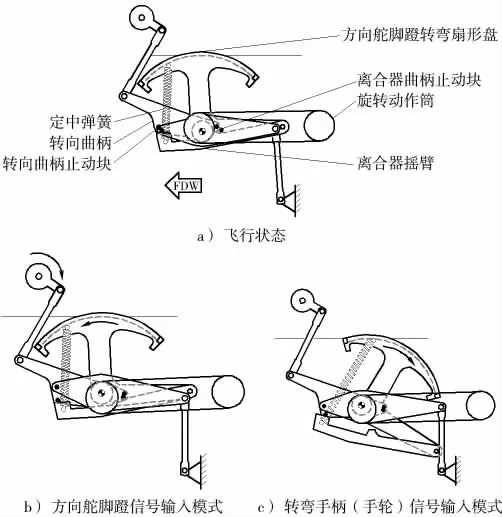
图3 前轮转弯操作原理
2.3.1 飞机在空中时
当飞机在空中,前起落架伸长时,为方向舵转弯旋转作动筒提供动力的信号来自空/地系统。方向舵转弯旋转作动筒推动方向舵脚蹬机构中的偏心滚轮移动到空中位,此时离合器摇臂将远离转向曲柄,离合器摇臂不再接受方向舵脚蹬的任何运动指令,方向舵脚蹬输入信号将无法驱动方向舵脚蹬转弯扇形轮。
2.3.2 飞机在地面时
(1)使用方向舵脚蹬信号输入。当飞机在地面,前起落架被压缩时,为方向舵转弯旋转作动筒提供动力的信号来自空/地系统。方向舵转弯旋转作动筒推动方向舵脚蹬机构中的偏心滚轮移动到地面位,此时离合器摇臂与转向曲柄止动块接触,来自方向舵脚蹬的输入信号将驱动离合器摇臂,从而驱动方向舵脚蹬转弯扇形轮,实现方向舵脚蹬输入带动前轮转弯功能。
(2)使用转弯手柄信号输入。转弯手柄的移动将直接带动控制钢缆和转弯扇形盘的移动,当转弯扇形盘移动时,方向舵转弯旋转作动筒上的离合器摇臂带动转弯曲柄止动块,同时拉伸旋转作动筒中的定中弹簧。由于方向舵系统的定中弹簧弹性要比脚蹬转弯机构内的定中弹簧弹性更强,因此转弯曲柄将不会发生任何移动。由于转弯手柄可以超控方向舵脚蹬的输入,因此转弯手柄的移动将不会反向带动方向舵脚蹬。
3 故障分析
结合前轮转弯系统原理和故障现象,判断可能的故障原因有4类:①空/地系统故障;②钢索张力值;③旋转作动筒;④手轮与底盘的摩擦力过大。
3.1 空/地系统故障
(1)空地传感器故障。通过与机组的沟通和驾驶舱观察,可以排除空/地传感器故障。因为如果是传感器故障,P5头顶板的PSEU灯会点亮。
(2)空地继电器故障。PSEU组件内的前起落架在地面的信号给空/地继电器(J20)提供供电信号,J20内继电器信号接地,此时115 V交流转换汇流条2给空/地继电器(J20)提供电源,J20继电器内部触电移动到“GND”位,旋转作动筒处于吸合位,实现前轮转弯功能(图4)。如果J20继电器故障,此时PSEU内前起落架在地面的信号无法提供正常的接地信号,系统会认为前起落架处于非压缩位状态,空/地继电器J20在5 s延时后移动到“AIR”位,旋转作动筒处于断开位,无法实现前轮转弯功能。因此当J20继电器内部无法正常的提供地信号时,执行PSEU自检时会显示相应的故障代码,或者P5头顶板的PSEU灯会点亮。

图4 电气系统原理
在实际排故过程中,结合上述两条以及故障现象,可排除是由于空地系统的故障导致的。
3.2 钢索张力值
通过对前轮钢索NWS-A和钢索NWS-B张力值的测量,在对应的温度下,钢索张力值均在手册的标准范围内,符合要求。
3.3 旋转作动筒或手轮与底盘的摩擦力
从简单到复杂进行原因排除,并对排故过程中发现的现象进行适当的设想,最后将故障原因锁定为转弯手轮磨损过度,致使在AMM手册规定的最大力矩值的情况下,导致转弯手轮与底盘的摩擦力过大,使得脚蹬在驱动前轮转弯时失效。
4 故障原因解析
过站排故过程中,对故障现象进行分析后,首先对前轮钢索进行目视检查,无腐蚀、断丝、卡阻,与其他机构无干扰等现象,其后对前轮钢索NWS-A和钢索NWS-B张力值的测量,均符合手册要求。
通过对系统分析,考虑是否是旋转作动筒的故障,导致方向舵转弯旋转作动筒未能推动内部偏心滚轮到地面位,从而使离合器摇臂未能与转向曲柄止动块接触。在此推断基础上,采用登脚蹬的方法进行验证,发现登脚蹬时,前轮转弯手轮并未进行相应的作动。发现这点后,大胆设想是否是由于转弯手轮固定螺帽拧得过紧,从而导致脚蹬无法控制前轮转弯。后经验证发现,前轮转弯手轮键槽和转轴处垫片均遭到不同程度的磨损,在紧固手轮固定螺帽后,造成手轮与底盘接触摩擦,导致摩擦阻力过大,继而活动脚蹬时手轮不能进行随动(图5)。拧松手轮固定螺帽后,脚蹬能正常控制前轮转弯。后续更换前轮转弯手轮后,故障排除且未再现。
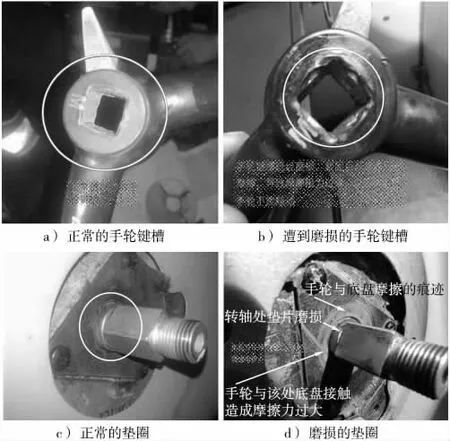
图5 转弯手柄磨损对照
这是一起典型的部件未正确安装导致的故障,在长期的使用过程中,部件遭到严重磨损。日常的航空器维修过程中,要严格按照手册要求进行部件安装,在日常的排故过程中不仅需要有扎实的理论基础,还要有丰富的经验。在实际工作过程中,也需要关注到故障以外的相关联部件的状态。
5 总结
前轮转弯系统常见故障大概有3类。
(1)前轮跑偏。可能原因为两前轮磨损不一致或钢索张力值不在手册范围内。参考处理措施:①检查两前轮磨损情况;②检查前轮NWS-A和钢索NWS-B的张力值,查看是否符合手册的要求。
(2)前轮抖动。可能原因为前轮跑偏。参考处理措施:查看前轮的磨损情况,同时更换两前轮,若还不行再调钢索。
(3)作动筒漏油。可能原因为天气变冷。封圈老化或损坏的参考处理措施:更换相关部件。
猜你喜欢
装备环境工程(2022年7期)2022-08-10 10:22:50
教练机(2022年4期)2022-03-13 12:45:30
现代制造技术与装备(2021年5期)2021-07-02 01:57:30
科学技术创新(2021年11期)2021-05-25 10:04:00
民用飞机设计与研究(2021年1期)2021-04-06 13:09:54
弹箭与制导学报(2020年4期)2020-09-17 06:14:38
机械设计与制造工程(2020年8期)2020-09-03 08:15:54
新生代·上半月(2019年6期)2019-09-10 16:56:02
中国自行车(2018年7期)2018-08-14 01:52:56
北京航空航天大学学报(2017年9期)2017-12-18 07:12:28