
环境减灾二号A/B卫星成像模式设计与效能评价
2022-07-12 02:54马磊白照广董筠朱军丛强姚舜李志武林军庄超然
航天器工程 2022年3期
马磊 白照广 董筠 朱军 丛强 姚舜 李志武 林军 庄超然
(1 航天东方红卫星有限公司,北京 100094)(2 中国资源卫星应用中心,北京 100094)
环境减灾二号A/B卫星均配置有16 m相机、高光谱成像仪、红外相机、大气校正仪4种光学载荷,具备可见光、高光谱和红外对地成像能力,以及在轨大气同步探测功能。两星通过同轨组网实现快速获取地面影像的能力。相对环境减灾一号A/B卫星[1],以及美国陆地卫星(Landsat)系列和欧洲航天局的哨兵(Sentinel)系列卫星[2-5],星上谱段齐全、功能匹配,具有更高的空间分辨率、更大的观测幅宽、更全的观测要素、更短的覆盖周期。而环境减灾二号A/B卫星有效载荷类型多、数量多、数据量大、各载荷成像条件和约束不同,为满足卫星不同用户的使用需求,使得卫星成像模式设计复杂。
为更好地发挥卫星成像效能,在充分调研国内外光学卫星成像模式设计的基础上[6-8],结合卫星成像特点,完成了环境减灾二号A/B卫星成像模式设计。本文阐述了各载荷成像原理和流程,成像需求及约束条件,对设计的常规成像、应急成像、特殊成像等各类成像模式进行了详细论述。卫星在轨测试结果表明了成像模式设计的正确性和合理性,并从全国陆地区域覆盖观测和全球南北纬80°间任一目标观测两方面进行了观测效能评价。
1 载荷成像原理及流程
1.1 16 m相机
16 m相机采用折射式光学系统[9],地物辐射信息经过相机镜头和9块分光棱镜后,分成蓝、绿、红、近红外和红边5个谱段分别成像在5片12 000像元长线阵CCD探测器上,如图1所示。在积分时间内,CCD探测器完成光电信号转换,数据经过A/D转换等处理后,输出至数传分系统。

图1 16 m相机光学系统示意图Fig.1 Schematic diagram of optical system of 16m camera
16 m相机热控组件在轨处于长期工作状态,其他部件为短期工作状态。每次成像时,相机控制器首先加电,用时2 s完成初始化,在接收到开始成像指令后,并行接通4台相机视频电路电源,每套视频电路分为3步加电、每步加电间隔约为2 s。视频电路完全加电并完成初始化后,进入成像工作状态,开始向数传分系统发送数据。
1.2 高光谱成像仪
高光谱成像仪采用时空联合调制干涉光谱成像技术原理[10],利用推扫成像的方式,通过干涉仪、光学成像镜获取目标辐射信息,由面阵探测器同时获取地面目标的空间图像信息和光谱干涉信息,并将带有干涉影像信息的图像光信号转换成电信号,再经信号处理电路和数据压缩电路后输出至星上数传分系统,通过数传分系统传到地面,最后经地面反演后生成光谱影像图。时空联合调制光谱成像原理如图2所示。
在高光谱成像仪成像时,卫星平台通过直接指令对高光谱成像仪控制器加电,之后控制器根据CAN总线接收的遥控指令,实现可见光成像电路/短波红外成像电路的加断电和参数设置。由于短波红外探测器需要在150 K的低温环境下工作,因此控制器和成像电路加电工作前需要对短波红外制冷机进行降温。
1.3 红外相机
红外相机通过扫描镜穿轨摆扫,同时获取地物可见近红外、短波及中长波红外9个通道的多光谱信息。地物经扫描镜引入离轴三反光学系统,由视场分离器分成不同的波段,经会聚镜成像到线列探测器上,如图3所示。探测器输出的电信号经模拟放大、A/D转换等操作后形成数字信号,连同辅助数据信息进行格式编排后,传至数传分系统。

图3 红外相机光学系统示意图Fig.3 Schematic diagram of optical system of infrared camera
红外相机制冷机在轨处于长期工作状态,无需在每次成像时进行加断电。红外相机未设置独立的热控单元,由下位机负责记录和传输在轨长期工作的热控组件相关参数,因此下位机在轨处于长加电运行状态。红外相机每次成像时,先后对辅助数据通道、扫描消角驱动电路和成像电路进行加电和设置。
1.4 大气校正仪
大气校正仪采用分孔径与分振幅结合的同时偏振测量方法,通过穿轨扫描的方式同步获取与16 m相机成像区域上空的大气多谱段信息。目标信号经反射镜被望远系统准直入射到渥拉斯顿棱镜后,分解为两束振动方向垂直的线偏振光,经聚焦透镜聚焦于两个像点,如图4所示。通过采用两路完全相同光路,在渥拉斯顿棱镜方位互成45°情况下,可获得0°、90°、45°、135°四个不同振动方向的线偏振光。

图4 大气校正仪偏振测量原理图Fig.4 Schematic diagram of polarization measurement of atmospheric corrector
大气校正仪短波红外探测器需要工作在较低的温度来降低热噪声和暗电流以达到较好的性能,为了达到-50 ℃的工作温度,需要对探测器进行主动制冷。制冷采用半导体制冷,制冷时间约为5 min。每次开机成像时,首先开启探测器温控单元,并启动制冷工作,5 min后对成像电路进行加电和参数设置,然后开启扫描电机驱动单元进行数据采集。
2 成像需求及约束
2.1 成像需求分析
环境减灾二号A/B卫星在轨以180°相位分布于高度为644.5 km、降交点地方时为上午10:30的同一太阳同步轨道面内,每星每天有2至3个轨道圈次降轨经过国境上空。卫星用户多,行业应用领域广泛,各用户对星上配置的16 m相机、高光谱成像仪、红外相机、大气校正仪等4种光学有效载荷数据的需求侧重点不同。为最大限度满足各用户对卫星不同图像数据的迫切需求,星上4种载荷应尽量同时开机成像,特别是国境内区域。根据轨道特性,卫星每晚升轨经过国境上空,为应对突发应急事件,提高卫星观测数据获取的实时性,星上红外相机可在夜间经过国境上空时开机成像,并实时下传。
2.2 载荷数据率分析
16 m相机由4台相同的相机“一”字拼接构成,每台相机具有5个可见光谱段的成像能力,总原始数据率达到1.28 Gbit/s;高光谱成像仪包含可见光和短波红外两个成像通道,可见光通道115谱段,短波红外通道110谱段,在644.5 km标称轨道高度下,可见光通道成像帧频为143帧/秒,原始数据率为900.042 Mbit/s,短波红外通道成像帧频为71.5帧/秒,原始数据率为219.84 Mbit/s;红外相机采用多元并扫成像方案,通过扫描镜穿轨摆扫获取可见近红外至长波红外共9谱段的地物信息,原始数据率为170 Mbit/s;大气校正仪通过穿轨圆周扫描探测,获取可见近红外至短波红外共9谱段的大气参数信息,原始数据率为0.2 Mbit/s。4种载荷总原始数据率为2.57 Gbit/s,同时各载荷数据率差异极大。
2.3 数据下传分析
卫星数传分系统采用第三代数传技术,具备2×450 Mbit/s的双通道高速传输能力,即载荷数据经数传天线进行双极化复用输出至地面站。由于载荷总原始数据率大,需要对图像数据进行压缩才能实现实时下传的需求。因大气校正仪原始数据率较低,不再进行压缩。16 m相机、高光谱成像仪、红外相机数据分别设置为高压缩比和低压缩比两种模式,低压缩比模式用于获取高质量图像数据,高压缩比模式可以满足用户实时传输的需求。对于红外相机单载荷夜间成像,可使用无压缩模式,进行单通道数据实传。
卫星上配置有星务数据存储模块,负责对星上产生的实时遥测等数据进行全天时存储,受测控通道下传码速率低的限制,该数据通过数传通道下传。根据星务数据存储模块每天存储的数据量,以及其与数传间传输的实际有效码速率,经计算,每天存储的遥测数据需2至3个数传弧段完成下传。
2.4 成像时段约束
星上4种载荷中,16 m相机、高光谱成像仪、大气校正仪只在白天开机,红外相机可在白天和夜间开机。
高光谱成像仪受短波红外谱段探测器读出电路工艺、制冷机寿命限制,制冷机在轨开关机次数和工作总时间均存在上限。考虑发射前地面开关机次数、时间,以及卫星在轨5年寿命,高光谱成像仪制冷机在轨期间可每天开机一次,关机一次,且连续开机时长不大于10轨。
红外相机红外谱段探测器真空杜瓦、可见光组件、铟镓砷(InGaAs)组件及定标装置,大气校正仪红外谱段探测器组件在入轨后需要进行加热除气,此段时间内两种载荷不能开机成像。
3 成像模式设计
3.1 成像准则
综合考虑卫星轨道特性、平台配置情况、各载荷成像特点等因素,确定卫星成像准则如下。
1)长条带成像
星上载荷16 m相机、高光谱成像仪、红外相机、大气校正仪的成像幅宽分别为800 km、96 km、720 km、800 km,均具有成像幅宽大的特点,若侧摆成像时,边缘视场图像光学畸变较大,因此主推星下点长条带成像模式。以16 m相机为例,成像10 min,则观测区域的面积可以达到326 4000 km2。
2)多载荷协同工作
按照环境减灾多要素观测要求,卫星观测谱段从可见光到长波红外全部覆盖,地面分辨率按照16×N系列设计,包括16 m、48 m、96 m,特别有利于应用数据融合。为提高图像产品质量,配置的大气校正仪可获取16 m相机相同观测区域上空的大气参数信息,与相机数据同步下传,用于图像数据的大气校正处理。在轨运行过程中,4种载荷应尽可能同时成像,进行协同工作。
3)成像任务参数化
将各类成像模式以相对程控指令组的形式提前固化到星上,在进行每次成像任务时,只需上注开机时间、时长和少数必要的成像参数即可。
4)应急响应成像
只要卫星白天降轨经过国内区域就会开机成像,因此应急响应成像主要针对夜间过境,以及境外成像情况。需要在国内外夜间成像时,可安排红外相机单独开机成像。针对境外白天突发事件,基于星上固化的成像用多组相对程控指令,卫星具备一键式清除现有成像任务,并快速接收和启动新上注成像任务的能力。
5)集约化成像
综合考虑卫星功耗、设备寿命、操作安全性等,以“国内区域覆盖性观测、境外区域确保应急观测”为基础,开展集约化成像。
3.2 数据通道划分
卫星16 m相机数据通过数传压缩编码器进行压缩,高光谱成像仪和红外相机数据自行压缩后传至数传,大气校正仪和星务存储模块数据不压缩,直接传至数传。根据各载荷原始数据量大小以及压缩特点,兼顾数传双通道数据平衡设计,将16 m相机数据分配至通道一,其他数据分配至通道二。经数传高级在轨系统(AOS)格式编排后,两通道数据率相当,且均满足小于数传单通道450 Mbit/s的传输能力,可以进行数据实时对地传输。两个通道传输的数据类型和数据量的分配见表1。

表1 两通道数据类型和数据量分配Table 1 Data type and data volume allocation of two channel
3.3 常规成像模式
常规成像模式主要是4种有效载荷设备按任务要求进行工作,以获取用户所要求信息的工作模式,主要包括4种:实传模式(含星务数据存储模块下传)、记录模式、回放模式、边记边放模式。此外同一轨道圈内还可以进行境外阳照区记录、境内阴影区回放的组合模式,只影响整星能量平衡,对载荷而言,是独立模式的组合。
1)实传模式
在地面站可视范围内,卫星处于正常飞行姿态,有效载荷成像,数传将图像、辅助数据等实时发送至地面站。星务数据存储模块数据在此模式下下传。
2)记录模式
在地面站可视范围外,卫星处于正常飞行姿态,有效载荷成像,数传将接收到的数据处理后送至固存记录。
3)回放模式
在境内地面站可视范围内,卫星处于正常飞行姿态,有效载荷不成像,固存记录的数据以2×450 Mbit/s速率回放至地面站。
4)边记边放模式
在境内地面站可视范围内,卫星处于正常飞行姿态,有效载荷成像,数传工作在高/低压缩比条件下,压缩后数据送固存记录的同时可从固存读取已存数据,该模式可获得高质量境内图像数据,同时又可进行前期数据的回放,可提高卫星在轨的数据获取能力。
根据载荷成像时段约束、压缩比设置情况、数传天线使用情况,常规成像模式设计见表2,共计9种。

表2 常规成像模式设计Table 2 Conventional imaging mode design
在实传、记录、边记边放模式中,4种光学载荷均开机工作,根据前文所述4种载荷从开始加电至图像输出用时不同,为最大可能节约卫星能源,采取分时启动加电和各图像同时输出的成像加电策略,即加电过程耗时长载荷先加电,加电过程耗时短载荷后加电,通过加电间隔控制,使得各载荷开始输出图像的时刻基本一致,具体如图5所示。
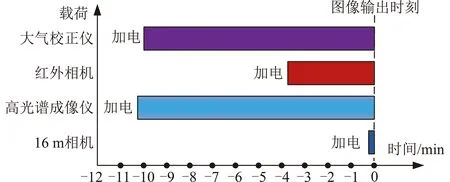
图5 载荷加电时序图Fig.5 Load power on sequence diagram
在各载荷加电过程中,为减少星上总线传输的指令条数,减小总线资源占用率,同时提高操作简洁性,各载荷控制器将自身加电用指令进行高度封装,如将4台16 m相机各三步的加电指令按指令顺序和时间间隔封装在“16 m相机成像开”指令中。16 m相机控制器在收到“16 m相机成像开”指令后,自主执行各台相机的加电操作。
3.4 应急成像模式
红外相机成像谱段含中长波红外谱段,与其它三载荷不同,其具备夜间观测能力。为应对火灾等应急事件,提高观测效率,设计了红外相机夜间单独成像的工作模式。对于境内夜间应急事件,进行实传成像,由于此时数传信道带宽充足,红外相机数据可以无压缩下传;对于境外夜间应急事件,进行红外相机境外记录数据、境内回放数据。具体工作模式见表3。

表3 红外相机单独成像模式设计Table 3 Design of separate imaging mode of infrared camera
3.5 特殊成像组合
针对红外相机和大气校正仪在轨初期除气、无法开机成像的情况,为有效利用在轨时间,提高在轨测试效率,设计了16 m相机和高光谱成像仪两种载荷的组合成像模式,见表4。双载荷的数据回放使用常规成像模式的回放模式进行。
根据高光谱成像仪制冷机开关机次数和总工作时间的限制,兼顾寿命需求,制定了高光谱制冷机每天开机一次,即在每天进行第一次境内实传时开机,连续工作10轨后关机的策略,并且要求卫星降轨过国境时高光谱成像仪需开机成像。在境外高光谱成像仪不开机成像的情况下,设计16 m相机、红外相机和大气校正仪的组合成像模式,境外记录数据,境内进行数据回放。
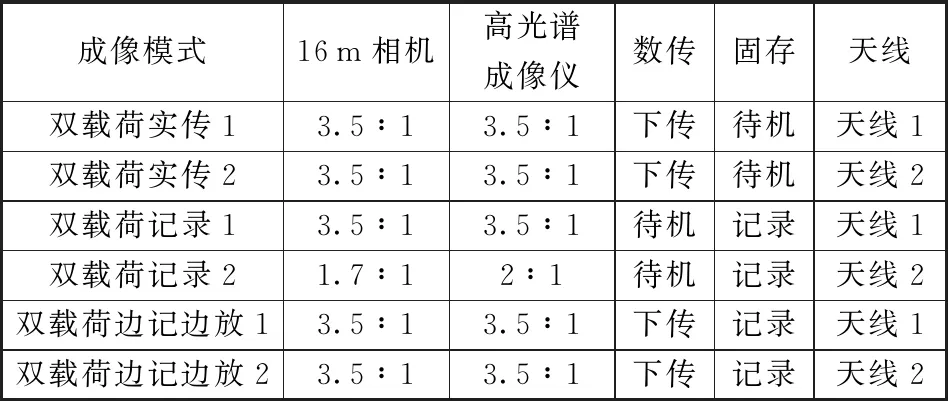
表4 16 m相机和高光谱成像仪组合成像模式设计Table 4 Design of combined imaging mode of 16m camera and hyperspectral imager
3.6 成像安全模式
为保证卫星能源安全,设计了载荷成像时间和成像电流安全模式。
每种载荷每轨单次最长连续成像时间默认为20 min,该最大值可通过卫星上注带参指令修改;如果单次连续成像时间超过最大值,则载荷管理控制器自动执行关机指令序列,停止本次成像任务。
星务中心计算机对每种载荷开机工作电流进行判断,如果出现电流异常增加,即当工作电流遥测值连续两次大于设定的安全值时,则认为进入载荷电流安全模式,自动执行关停该载荷的指令序列。
4 成像效能评价
4.1 成像模式验证
2020年10月2日,在两星相位逐步扩大、星座建立过程中,按在轨测试工作安排,两星16 m相机和高光谱成像仪首次开机成像,成像区域为内蒙古、北京、海南岛等地区,成像效果均为图像清晰,层次丰富,光谱信息丰富,如图6所示。
10月20日,两星红外相机、大气校正仪在轨除气工作完成,达到预期目标,由在轨除气模式转为在轨正常温度工作模式。随后进行了4种光学载荷开机成像测试,模式包括所设计的直传、记录、回放、边记边放、单红外阴影区直传等所有模式,各类模式均工作正常,功能性能满足要求,能够高效正确完成用户各类任务。
成像安全模式是在卫星出现异常情况下自主进入的保护模式,卫星入轨运行期间,工作稳定,未进入该模式。但是,卫星出厂前在整星电性能测试阶段对该模式进行了充分的验证。

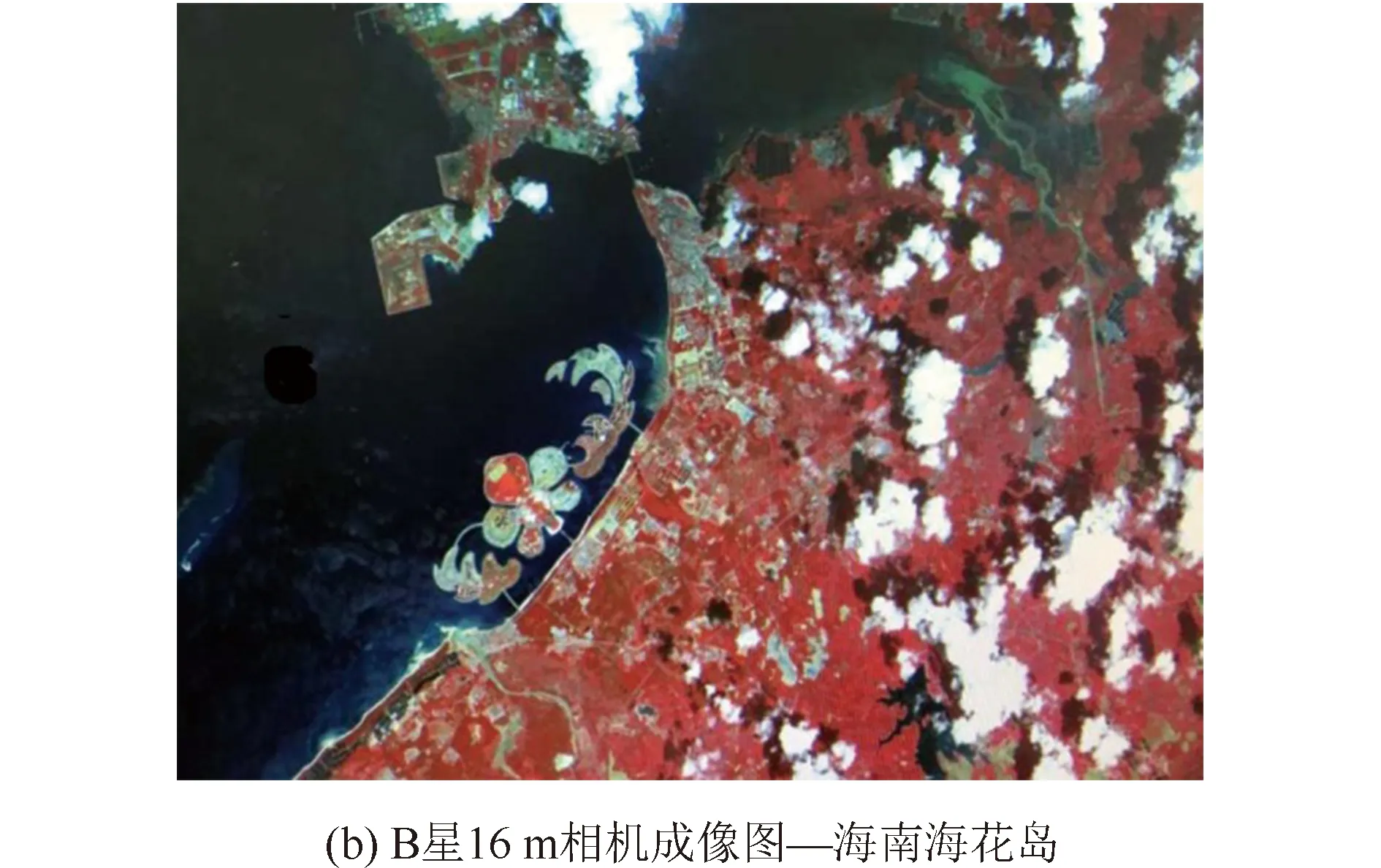
图6 两星16 m相机首次成像图Fig.6 First image of 16m camera of two satellites
4.2 全国陆地覆盖观测能力
基于16 m相机、红外相机的大幅宽观测能力,以国境内的密云、三亚、喀什为数传接收站,在卫星实传模式下,根据中国资源卫星应用中心提供的在轨实测数据,两星组网运行一天降轨观测的全国陆地范围覆盖率为76%~80%,如图7所示;连续两天降轨观测的全国陆地范围覆盖率为99%,如图8所示。

图7 两星组网运行一天的全国陆地范围覆盖Fig.7 National land coverage of two satellites in one day

图8 两星组网运行两天的全国陆地范围覆盖Fig.8 National land coverage of two satellites in two days
考虑红外相机可在升轨段成像,则两颗卫星两天时间内可对全国陆地区域进行全覆盖观测。以2022年3月11日、12日为例,两天时间内A、B星各进行5次降轨成像,A星进行两轨升轨成像,可以完成全国陆地区域的覆盖观测和数据实时下传,如图9所示。
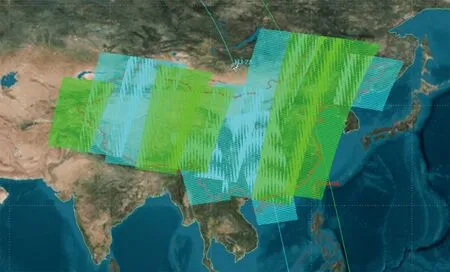
图9 两颗卫星两天时间内对全国陆地区域进行覆盖性观测Fig.9 National land area coverage observation by two satellites in two days
4.3 全球陆地目标观测能力
根据卫星轨道特性,单颗卫星一天内16 m相机的实际观测覆盖如图10所示。

图10 单星一天内16 m相机的实际覆盖Fig.10 Coverage of 16m camera in a single satellite in one day
赤道上卫星每圈西退的距离约为2700 km;第二天轨道与第一天轨道之间的间距约663.41 km。16 m相机800 km、红外相机720 km、大气校正仪800 km的幅宽可以覆盖两天之间的间距,卫星轨道倾角为98°,因此单星16 m相机、红外相机、大气校正仪均可保证4天对全球南北纬80°内任一目标进行观测,如图11所示,两颗卫星16 m相机、红外相机、大气校正仪可保证2天对全球南北纬80°内任一目标进行观测。高光谱成像仪成像幅宽为96 km,大于一个轨道回归周期(41天)内的轨道间距66.34 km,因此单星高光谱成像仪可保证41天对全球南北纬80°内任一目标进行观测,两颗卫星高光谱成像仪可保证20.5天对全球南北纬80°内任一目标进行观测。
两颗卫星在轨完成了与同样配置了800 km幅宽16 m相机的高分一号、高分六号卫星的组网部署。四星组网后可保证16 m相机1天对全球南北纬80°内任一目标进行观测,大幅提高了数据获取时效性。

图11 单星16 m相机4天全球南北纬80°内覆盖示意图Fig.11 Schematic diagram of within 80°of global north-south coverage of single satellite 16m camera in 4 days
5 结束语
环境减灾二号A/B卫星成像模式设计以提高卫星应用效能为目标,在充分考虑各载荷成像制约因素、高速载荷数据下传的基础上,本文设计了常规成像模式即四载荷同时开机成像模式,实现了多类型数据的同步获取能力,满足了不同用户的数据使用需求;设计了红外相机夜间成像模式,数据可以不经压缩下传,在图像质量提高的同时,增强了对应急事件的观测效率;针对红外相机和大气校正仪需在轨除气,以及高光谱成像仪制冷机寿命制约,设计了两类特殊成像模式,提高了数据获取时效性,保证了载荷使用寿命,且未影响国内数据获取的完整性。同时,从全国陆地覆盖观测能力和全球陆地目标观测能力两方面对卫星的成像效能进行了评价。
通过在轨测试和业务运行,全面验证了环境减灾二号A/B卫星成像模式设计的正确性,各载荷成像质量优异。目前卫星各载荷图像产品已在自然灾害监测、大型水体水华水质监测、森林资源监测、农作物长势监测等多个领域应用,发挥了重要作用,展现出了重要价值。
猜你喜欢
农业工程学报(2022年8期)2022-08-08
环球时报(2022-05-23)2022-05-23
航天返回与遥感(2022年1期)2022-03-09
金桥(2021年4期)2021-05-21
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2021年12期)2021-03-29
科学24小时(2019年6期)2019-09-05
科学与技术(2018年5期)2018-11-15
光学仪器(2016年6期)2017-04-24
科技与创新(2016年17期)2016-11-04
