
使用动态水平仪数据提高雷达测高精度
2022-07-11 07:44秦志乐臧伟旺
电子技术与软件工程 2022年10期
秦志乐 臧伟旺
(1.南京国睿防务系统有限公司 江苏省南京市 210012)(2.中国电子科技集团公司第十四研究所 江苏省南京市 210012)
1 引言
目前,传统三坐标雷达主要采用多通道比幅测高的方法,影响测高精度的因素有很多,比如:单向性误差(包括非标准大气折射误差σ、机内噪声误差σ、接收通道幅度不一致误差θ、A/D 量化误差σ等)和方向性误差(天线转台水平误差σ、地形遮蔽误差σ、多径效应误差σ等)。此外,还有很多因素会形成雷达测高误差,由于这些误差或是对雷达测高误差影响极小,或是属于特殊情况,或是难以测量,由于误差极小,可以忽略不计。
近年来,随着计算机和高速芯片技术的快速发展,对于一些可测试影响测高的因素,通过软件实时修正,可以不断的提高测高精度。基于此,本文详细介绍了使用动态水平仪实时数据,修正天线转台水平误差,提高三坐标雷达的测高精度的方法,并使用实测数据验证了该方法的有效性。
2 天线水平误差对雷达的测高精度影响分析
2.1 波束仰角指向误差对雷达测高的影响
雷达测高公式如下:

式(1)中: 为目标高度; 为雷达架高;R 为目标斜距;θ 为目标仰角;r为地球等效半径,通常取8490 km。
由式(1)可知,测高误差是由天线高度标定误差、测距误差和仰角误差共同决定的。由于引起测距误差和仰角误差的因素很多,而且有些因素具有随机性,从而使得测高误差具有随机性。根据误差理论,测量误差常用误差的均方根值来表征。设测距误差的均方根值为σ,测仰角误差的均方根值为σ,测高误差的均方根值为σ,天线高度标定误差暂忽略。根据误差理论,由式(1):
可推导出:

在过去的文献中,对于地面三坐标雷达,式(2)等式右边的第二项常常被省略掉,理由是测距误差很小,第二项相对第一项可省略不计。于是便有以下表示测高误差的简化公式:
2.2 天线水平误差对仰角测量的影响
天线水平误差用均方根值σ表示,其中,天线转台水平误差用均方根值σ表征,为分析方便起见,将天线遭遇大风、调平机构失修、阵地下沉、雷达机动到低标准阵地等因素引起的天线平台水平误差综合起来放到天线转台水平误差中考虑,天线阵面平坦度误差用均方根值σ表征,天线阵面升降定位容差用均方根值σ表征。根据误差理论,

以某高机动三坐标雷达为例。调平精度σ 主要由主水平传感器的测量精度σ和调平软件设定的门限σ决定。在其技术说明书中介绍,水平传感器精度σ≤1′,调平软件设定的门限σ≤2′所以调平精度 σ=σ+σ≤3′。先不论这个值是否合理,就以这个理想的值来分析调平精度σ引起的测高误差。下面文中均以观测300km 远、10000m 高的目标为例进行分析,此时目标波束仰角在2°附近,天线转台水平误差所引起测高误差为260m。天线阵面平坦度误差理论值为σ=0.02°。再考虑天线阵面升降定位容差,理论值为σ=0.1°。综合以上三项,则天线波束仰角偏差为0.114°,即6.815′。仍以观测300km 远、10000m 高的目标为例,此时天线波束偏差所引起测高误差为890m。天线标定误差用均方根值σ表征,由式(4)计算出,σ=8.37′。此时天线标定误差所引起测高误差为730m。
若天线遭遇大风、调平机构失修、阵地下沉、雷达机动到低标准阵地等因素,天线转台水平误差有可能超过20′。再考虑天线阵面平坦度误差和天线阵面升降定位容差,由式(4)计算,则σ=21.1′。此时天线标定误差所引起测高误差为1841m。由以上分析可以看出,天线存在的水平误差足以引起很大的测高误差。然而,天线的水平误差,修正起来有一定的难度,必须设计一种技术方案,对天线转台的水平度进行实时跟踪检测,以此为依据,通过对数据终端的高度数据进行实时修正,或通过改变波束仰角指向的方法,达到对测高误差实时修正的目的。
2.3 使用动态水平仪数据实时修正天线水平误差
在转台水平的情况下, 正常工作的雷达天线围绕着天线中心转动,其法线或波束指向在空间的仰角是一定的。理论上,如果天线仰角存在误差, 如图1 所示,雷达天线在扫描方向上实际扫描线( 实线) 与目标测量位置( 虚线) 具有一定的偏差,并且在各个方向偏差是恒定的,那么在各个方位上探测目标的仰角误差是恒定不变的。但是,对于机动雷达,特别是大、中型雷达来说,随着每次机动后的天线调平和天线旋转重心的改变,这个误差会实时的改变,造成雷达的测高误差是随机甚至跳变的。
现代雷达为保证天线转台的水平度,除了通过调平机构在雷达架设时高精度调整天线转台的水平度外,一般都在天线转台上配置动态水平仪,随着天线转动,动态水平仪会实时送出对天线转台倾斜角度的测量数据,雷达的数据处理系统依据此数据,对目标的定位信息(方位、距离、高度)进行实时的修正,以消除转台水平倾斜角度误差的影响。一般的动态水平仪均通过相互垂直的X、Y 坐标,来表征平面的水平度,安装时,通过静态标定的方法,我们使X 轴或者Y 轴和天线的扫描波束方位保持一致,如图1 所示,动态水平仪X 轴或者Y 轴的值即可作为仰角误差修正值Δθ使用。理论上,修正Δθ,能提高三坐标雷达的测高精度。

图1: 天线转台水平误差示意图[3]
3 使用动态水平仪实时数据对三坐标雷达测高数据的实时修正流程
雷达天线按照一定转速旋转,则天线扫过一个波束宽度的时间是一定的,该时间称为雷达一个方位工作周期的驻留时间。设雷达转速是M(转/分钟),天线波束宽度N(°),T(ms)是天线扫过一个波束宽度的时间。
则雷达一个方位工作周期驻留时间:

若M=3(转/分钟),N=2°,则T ≈112ms,若M=6(转/分钟),N=2°,则T ≈56ms,若M=12(转/分钟),N=2°,则T ≈28ms。
我们以某公司CW-62 型动态水平仪为例,其典型技术指标为:
测量范围:±2°,动态精度:≤1′,响应时间:≤40ms。
由此可以看出,该动态水平仪能满足天线在3 转/分钟、6 转/分钟、12 转/分钟时,雷达在一个方位驻留周期内,实时采集天线水平值的技术要求。在安装时,通过标定,使动态水平仪的X 轴和天线电扫描轴方位保持一致,Δθ 即为X 轴的倾斜值。
雷达正常工作时,在一个方位驻留周期内,动态水平仪将实时测量数据通过高速CAN 总线送到雷达控制模块,雷达控制模块再将该数据通过高速光传输通道打包分发到雷达数据处理模块。同时,数据处理模块接收到该雷达一个方位工作驻留周期内的未修正高度的目标信息,然后通过高度修正公式,进行目标高度修正后,输出数据。如果雷达数据处理模块收到异常水平值,则产生调平告警信息,操作人员要立即停机检查伺服调平情况,经过伺服系统再调平,然后再继续工作。所有的测高数据修正流程必须在一个方位雷达工作驻留周期内完成,否则,修正后的高度误差将不会得到改善,甚至出现恶化。图2 为典型雷达一个方位工作周期内,使用动态水平仪实时数据修正雷达测高值的数据流程图。

图2: 动态水平仪实时数据修正雷达测高值数据流程图
4 实测数据验证
为了验证动态水平仪在实时修正雷达测高数据,提高测高精度的效果,我们将该方法在某机动三坐标雷达上进行了验证。该雷达在动态水平仪的安装时,使 X 轴和天线波束方位指向保持一致。
4.1 不同转速下、动态水平仪采样值
在满足天线机械调平指标3′的前提下,首先,我们统计了雷达天线旋转50 圈,按照1°刻度,记录360°的动态水平仪X 轴值(单位度)。然后,雷达进行一次撤收、机动、架设,调平后,天线旋转50 圈再统计一次。图3 为天线3转/分钟动态水平仪360°X 轴采样值,图4 为天线6 转/分钟动态水平仪360°X 轴采样值,图5 为天线12 转/分钟动态水平仪360°X 轴采样值。

图3: 天线3 转/分钟,动态水平仪360°X 轴采样值
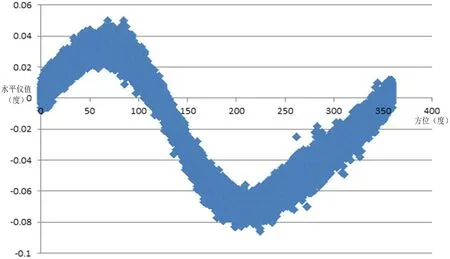
图4: 天线6 转/分钟时,动态水平仪360°X 轴采样值
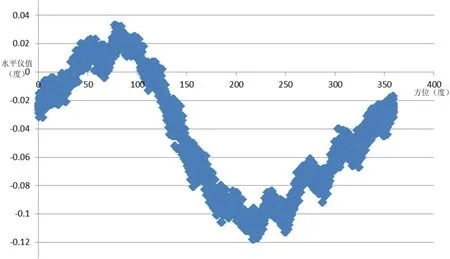
图5: 天线12 转/分钟时,动态水平仪360°X 轴采样值
通过分析图3、图4、图5,可以得到如下结论:
(1)动态水平仪X 轴呈现有规律的周期性正弦波动,但是±180°相对方位上并不完全对称。
(2)天线水平值的改变,不会随天线转速的增加而改变,即天线的转速对水平仪的振幅影响有限。
(3)同一方位,动态水平仪X 轴的采样值每次都是在一定固定范围内随机的,不会出现大的跳变。
(4)雷达撤收、机动后,只要满足天线机械调平指标3′,动态水平仪X 轴波动规律和范围基本保持一定。
4.2 使用动态水平仪修正测高数据前后对比
当天线6 转/分钟工作时,对比使用动态水平仪采样值修正和未修正测高精度。为了统计方便,高度真值采用同时刻ADS-B 数据,统计方位360°、距离300KM 内,30 分钟内的有效航迹。为避免地物、多径效应等产生的奇异值影响,我们只统计仰角大于0.8°的目标信息。图6 为修正前、后目标距离-测高精度对比图,图7 修正前、后目标距离-高度差对比图,图8 特定高度层目标修正前、后目标距离-高度对比图。测高精度统计如下:
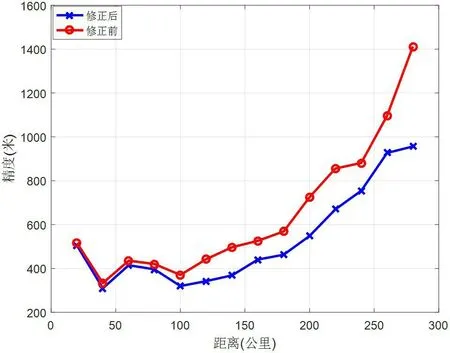
图6: 修正前、后目标距离-测高精度对比

图7: 修正前、后目标距离-高度差对比
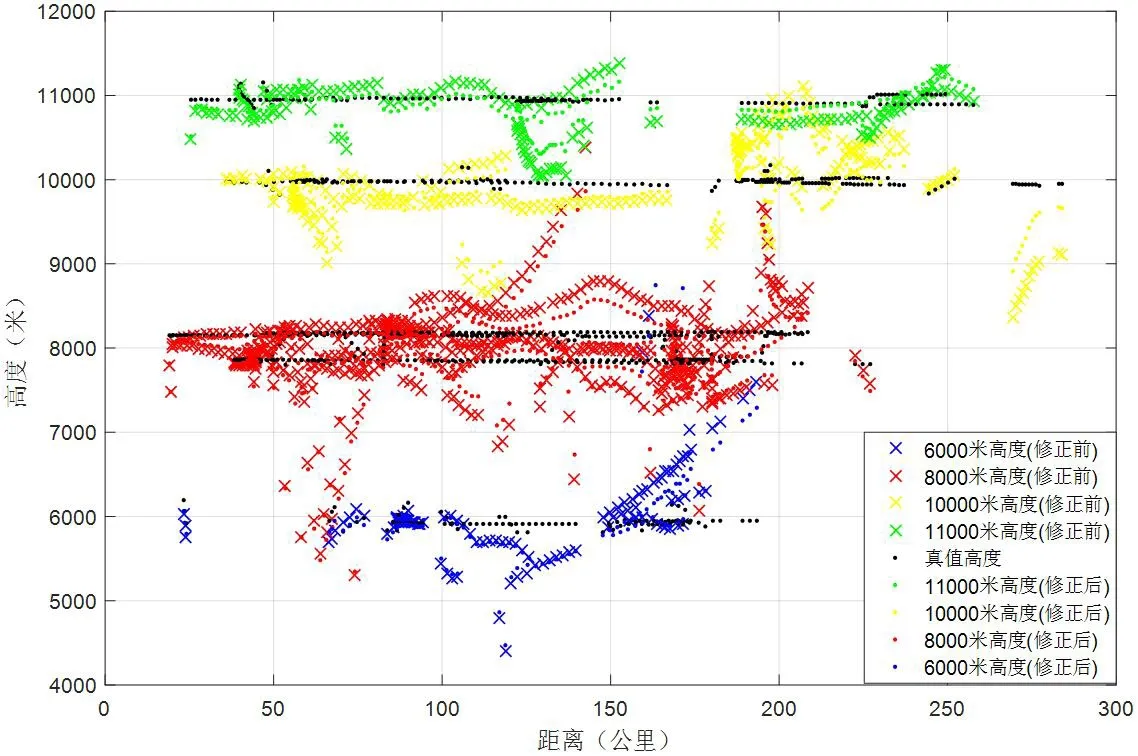
图8: 特定高度层目标修正前、后目标距离-高度对比

式(6)为精度统计均方根误差公式,H和H是同一目标的一次雷达高度值和ADS-B 测量的二次雷达值。
无修正时:
仰角>0.8°,距离<200km,样本数 3192 点,测高精度,459.95 M。
仰角>0.8°,距离200~300km ,样本数 278 点,测高精度,899.83 M。
修正后:
仰角>0.8°,距离<200km,样本数 3191,测高精度,395.68 M。
仰角>0.8°,距离200~300km,样本数 283,测高精度,720.74 M。
通过分析图6、图7、图8,可以得到如下结论:
(1)使用动态水平仪实时采样值来修正雷达测高误差,这个方法是有效的,能提高雷达的测高精度。
(2)目标距离越远,修正效果越好。这个结论和理论分析也是一致。
5 结论
本文详细分析了天线水平误差对三坐标雷达测高的影响,提出使用动态水平仪实时数据来修正测高误差,给出了能实现数据实时修正的条件以及实现修正的数据流程。最后,通过将该方法在某大型远程三坐标雷达上进行了验证,实测数据表明,使用动态水平仪实时数据修正能提高雷达测高精度。
对于大、中型机动三坐标雷达,天线阵面举高雷达、大型远程雷达来说,由于其特别容易受到天线调平精度变化大、大风、自重大等外在因素的影响,从而严重影响雷达的测高精度。通过在雷达天线转台中心加装动态水平仪,通过高速总线、光通信、高性能计算机等途径,做到实时修正雷达的测高数据,可以通过较小的代价,较大幅度提高雷达的测高精度,保证了雷达的作战性能的发挥。
本文提出的方法,可以用于指导未加装动态水平仪的老雷达改造,用于指导机动雷达的阵地优化工作。
猜你喜欢
中国民间疗法(2021年5期)2021-06-09
机械工程与自动化(2020年4期)2020-08-25
初中生世界·九年级(2020年2期)2020-04-10
质量技术监督研究(2018年6期)2019-01-15
森林工程(2018年4期)2018-08-04
测绘工程(2018年1期)2018-01-09
制造技术与机床(2017年8期)2017-11-27
航天工业管理(2017年4期)2017-05-12
科技视界(2016年15期)2016-06-30
