一种跟机自适应采煤机电缆拖拽装置的设计
2022-07-08 01:32:30史艳斌
机械管理开发 2022年4期
史艳斌
(晋能控股煤业集团地煤公司青磁窑煤矿, 山西 大同 037007)
1 电缆拖拽装置的组成
1.1 采煤机电缆拖拽装置机械部分的组成
通常采煤机电缆拖拽装置机械单元是由驱动部、轨道、拖缆小车、回转轮、油缸、固定座等组成,如图1 所示。
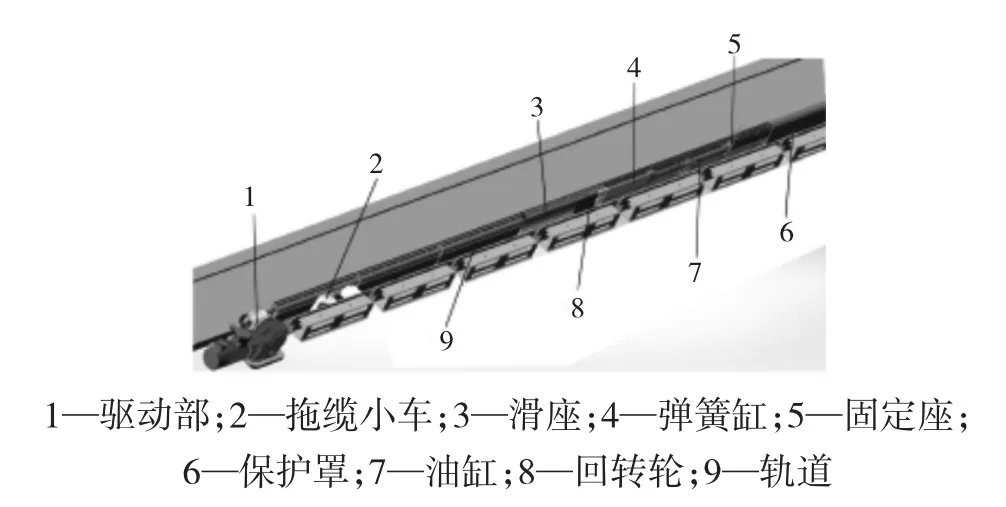
图1 采煤机电缆拖拽装置机械部分组成
驱动机构主要包含了电机、联轴器、减速机,这一机构的作用在于为拖缆装置提供可靠的动力;轨道主要由从动及主动导轨、导向装置等构成,其作用在于更好地保护及支撑电缆装置中的拖拽装置;拖缆小车的构成部分主要有车体、导向轮等,该机构的作用在于驱动电缆夹随着采煤机的运行而运行;传动机构的构成主要包含了链条、回转轮等,链条回路将会在拖缆小车部位发生闭合,形成一种循环的运动状态;回转部的构成主要包含了弹簧缸、固定座等,这一机构的作用在于为拖拽装置提供足够的张紧力。
采煤机正常运行时,拖缆小车将会在刮板输送机的电缆槽中进行循环运动,始终伴随着采煤机的运行而运行,拖缆小车的运行速度是采煤机运行速度的一半,电缆夹将会在导向轮部位出现一次弯折,确保电缆紧紧发生二次叠加。
1.2 采煤机电缆拖拽装置电气部分的组成
1.2.1 电控驱动系统
该系统主要包含了编码器、限位开关、隔爆兼本质安全型PLC 控制箱等,具体内容如下:
1)在控制箱内部配置的PLC 控制器是维持拖拽装置正常运行的关键部件,它可以精确读出采煤机运行的速度、方向及拉力,通过对各个装置运行的参数进行详细运算,可以得出拖缆小车所需具备的运行速度,由此控制变频器进行适当调节,促使拖缆小车可以紧跟采煤机运行。PLC 控制器的运用类型为西门子1200 系列的一种紧凑型PLC 1215C,可以满足作业面所处的一系列复杂环境,如温度过高、粉尘过大等。
2)变频器的类型为ABB 产品,其特点在于直接转矩控制,有助于及时响应负载转矩发生的变化。
3)拖缆小车之中的编码器可以利用多圈绝对值的编码器,有助于将拖缆小车所处的位置及运行的速度进行准确测量,并且可以对拖缆小车所处的位置进行有效记忆,利用CAN 通信将信息及时传输到PLC 之内。
1.2.2 链条自动张紧系统
该系统的构成部分主要包含了支架控制器、张紧油缸等。支架控制器的作用实现本地控制或者接收相关位机所发出的调节指令。在拖缆小车正常运行的过程中,可以将回转部之中张紧油缸的压力进行自动化调节,确保拖拽装置的链条可以时刻保持张紧状态,及时清除转向过程中的余链。
1.2.3 上位机监测系统
该系统主要包含了拖拽装置、采煤机、电液控三个主机。上位机系统的设计单位为天玛公司,其软件为LongWallMind 组态,利用矿区内部的网线将其连接到作业面的以太环网。
LongWallMind软件的设计主要是针对矿井下作业面来进行的,是一个可视化的操作页面,具有极强的通信能力,可以支持多个协议,能够与各个厂商所生产的设备进行连接,有助于数据信息的实时采集、处理及储存。
2 影响采煤机电缆拖拽装置运行的因素
1)在双向截煤作业中,采煤机在运行过程中需要经过五个环节,分别为截底煤、清理浮煤、斜切进刀、截三角煤和正常截煤,其中斜切进刀和截三角煤需要进行2 次,截底煤需要进行4 次,清理浮煤需要进行8 次。在这一过程中,采煤机在运行过程中需要进行14 次的转向,拖拽装置也需要与采煤机同步进行14 次的转向,多次的循环往复极易形成位置累计偏差。
2)矿井作业面在地质条件方面存在较大的差别,即使处于同一个矿井的不同作业面,甚至不同的时间内处于同一个作业面中,其所处的环境也存在较大的差别,刮板输送机中部的槽节与节之间存在一定的间隙,上下与左右的最大弯曲度分别为3°和1°,进而导致在输送机中拖缆小车与采煤机的运行轨迹均为曲线,但是却不是相同的曲线。这就导致两者在位置方面产生了极大的变化,并不是严格的动滑轮速度处于1/2 的对应关系。
3)拖拽装置的轨道建立在输送机的电缆槽之内,该设备的运行也需要满足槽节与节之间的间隙及弯曲度。不管电缆夹是在电缆槽之内处于被动拖动的状态,还是拖拽装置链条在轨道之内的运行,都会出现刮卡问题。当电缆槽内部的轨道上出现了落煤,拖缆小车的运行也会遇到较大的阻力。
3 采煤机电缆拖拽装置控制系统设计
3.1 控制策略
PLC 在开展调节的时候主要遵循四部分的变量,分别为采煤机的速度、采煤机所处的位置、电机的转矩、采煤机牛头电缆的拉力。PLC 的具体控制流程如下:
1)控制箱内安装的PLC 控制器可以借助CAN通信来掌握采煤机运行的速度、位置等一系列信息,同时也可以由此来计算出拖缆小车运行的速度、位置等。首先,变频器实施调节的主要依据为采煤机运行速度的1/2,以变频器之内的速度环PID 调节变频器来输出电机的转矩,确保拖缆小车可以保持稳定的速度,即采煤机运行的一半,变频器依照负载状况来适时调节输出转矩,这就是电机转矩。PLC 运行三个负反馈PID 闭环控制,输入量主要为以下三个部分,一是电机转矩形成的误差,二是拖缆小车形成的位置误差,三是采煤机牛头电缆出现的拉力误差,将输出的结果进行叠加,使其作用于拖缆小车的速度及位置给定之中。
2)在上行阶段,电缆夹存在的摩擦阻力将会随着采煤机部位的变化而呈现出线性变化,k 表示的为比例系数。如果电机转矩超出了采煤机所对应的电缆夹拖拽阻力,经过一系列运算之后,输出位置发生相应的偏差1。采煤机牛头不会对电缆夹产生作用,拉力传感器进行测量的数值与相对较小的牛头拉力值进行对比分析,输出位置的偏差2。其中,电机转矩的调节模式有着极大的占比,两者相互叠加,作用在拖缆小车的给定部位之中,及时纠正因作业面地质因素所导致的位置偏差。
3)在下行阶段,电机只能对拖缆小车发挥作用,使其可以空载运行,采煤机牛头拉动电缆夹,并且拉力会随着采煤机位置的变化而呈现出线性变化。同样,对电机转矩和牛头拉力传感器进行相关运算,其中占主导作用的是牛头拉力传感器,电机转矩和牛头拉力传感器之间的输出结果相互叠加,作用在拖缆小车位置给定之中。
4)当小车在运行阶段遇到卡阻时,电机会减速,当拖缆小车的运行落后于采煤机,PID 调节将会发挥作用,变频器提升电机的输出转速,增加转矩,从而可以继续随着采煤机的运行而运行。
3.2 通信监测机制
PLC 利用CAN 总线来完成采煤机的直接通信、借助以太网来完成其与采煤机主机的通信,即可以得到采煤机运行过程中的位置、速度、方向等一系列信息,两者之间可以形成一种冗余通信机制。当PLC无法与编码器实现通信的时候,PLC 可以依据所读取到变频器输出电机的转动速度来实施运算,有助于精确地计算出拖缆小车的位置。除了PLC 会与变频器的通信中断之外,仅仅存在一个通信中断,采煤机中的拖拽装置依旧可以与采煤机保持同步运行。
4 现场试验及应用效果分析
青磁窑煤矿薄煤层作业面的采高平均为1.4 m,长度平均为350 m,拖缆小车在运行时达到了175 m的轨道长度,驱动部与电控装置安装在采煤机的机尾。在采用了本文的自适应调节模式之后,确保电缆夹在拖缆小车及采煤机牛头部位的二层叠加状态。在作业面的整体运行中,采煤机与拖缆小车之间的位置偏差为1 m,在运行之中其偏差最大可以达到-2 m,返回到初始部位之后,再次恢复到原有的误差,通过进行相关的计算,再经过位置环PID 进行调节,极大补偿了因作业面工作状况发生变化所导致的拖缆小车位置与采煤机发生偏差问题,验证了该拖拽装置可以极好地满足采煤机的运行。
猜你喜欢
世界海运(2021年9期)2021-10-08 06:49:30
小天使·三年级语数英综合(2020年8期)2020-12-23 04:47:56
学习与科普(2019年30期)2019-09-10 03:50:26
兵工学报(2019年7期)2019-08-28 01:34:34
学苑创造·A版(2019年8期)2019-08-15 01:27:21
小学阅读指南·高年级版(2019年3期)2019-05-08 03:29:54
船海工程(2018年5期)2018-11-01 09:15:16
新教育时代电子杂志(教师版)(2018年29期)2018-02-25 01:59:59
科技资讯(2015年5期)2016-01-14 17:18:34
作文评点报·中考版(2015年9期)2015-12-17 01:47:58