无人机倾斜摄影测量技术在房地一体项目中的应用
2022-07-08 07:47张森桂罗自明
黑龙江科学 2022年12期
张森桂,胡 艺,罗自明
(湖北省地质局第二地质大队,湖北 恩施 445000)
1 无人机倾斜摄影测量技术概述
1.1 无人机倾斜摄影技术
倾斜摄影是相机与地面呈一定的角度对地面进行的影像数据获取。为了提高影像数据获取效率和减少遮挡产生的视角盲区,通常会将多个相机集成在一起挂载在无人机上进行作业。常见的倾斜摄影相机有2镜头和5镜头,市面上主要以5镜头居多,由1个下视相机和4个侧视相机组成,通常侧视相机与下视相机呈45°夹角。由相机焦距、航高、像元大小和影像地面分辨率四者之间的关系可知,像元大小相同的前提下,要想获得影像的地面分辨率相同,需要相机焦距和航高相同。实际作业过程中,相对航高是以下视相机参数为标准进行计算,由于侧视与下视存在一定的夹角,所以侧视相机中心点到地面的距离要比下视相机的大。为了能够保证获取影像分辨率尽可能相同,需要将侧视相机的焦距进行调整。以夹角为45°为例,假设下视相机距离地面的航高为100 m,焦距为35 mm,则侧视相机焦距为50 mm,这样才能获取分辨率一致的影像成果。
1.2 在房地一体中的应用流程
采用无人机进行倾斜摄影测量,生产实景三维模型用于地籍图测绘,主要包括航飞前的测区勘察和资料收集、空域申请、航线规划和影像数据获取、控制测量、内业数据解算和地籍图测绘,生产流程如图1所示。
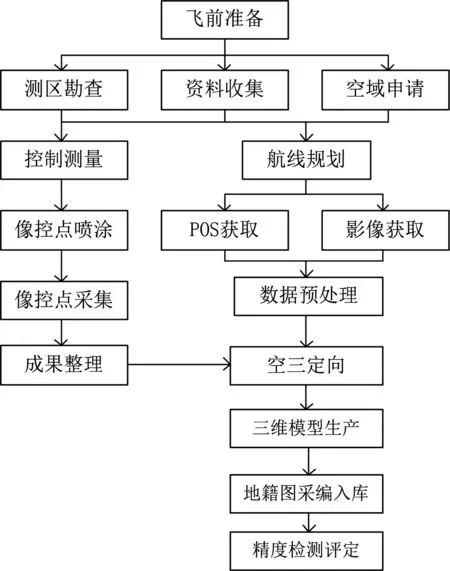
图1 基于倾斜摄影生产地籍图作业流程Fig.1 Cadastral map production process based on oblique photography
1.3 倾斜摄影存在的问题
高冗余影像数据。由于搭载的是5镜头,这样获取的数据理论上是垂直摄影的5倍,又因为倾斜摄影主要用于三维模型生产,为了模型较完整,遮挡区域少,作业时航向、旁向重叠度均为85%甚至更高,这样就使得影像存在大量的冗余,使得空三解算需要耗费更长的时间,对电脑设备要求更高。在不影响建模效果的前提下,剔除任务区边缘无效影像可以提升空三解算速度和精度,有利于数据更好地进行准确解算。
POS与影像不对应。垂直摄影中,POS数据和影像数据是一对一的关系,而在倾斜摄影测量中,POS和影像通常是一对五的关系,即1个POS对应5张影像。虽然5个相机安装位置相差不大,但是对于高精度数据解算来说,能够获得每个相机的精确位置坐标,这样更有利于对数据进行解算。通过分析相机安装位置之间的关系,以下视镜头为标准,采用matlab软件开发的POS解算软件,将侧视镜头的POS数据进行准确解算。
影像畸变严重。影像分辨率不一致的主要原因是由于侧视镜头近地点和远地点与下视镜头之间夹角不一致,这使得影像畸变更加严重。在数据解算中无法避免,但可以通过优化相机参数进行数据质量的提升,即通过少量影像进行解算,得到更加精确的相机参数,利用得到的相机参数解算更多的影像数据。
2 实例分析
2.1 测区勘察和资料收集
对任务区进行勘察,收集任务区已有资料可知,任务区约有农房100多户,都是1层房屋,范围内高差20 m左右。有2018年的0.2 m分辨率的正射影像,坐标为2 000国家大地坐标系,按照3度分带进行投影,可作为调绘的底图使用。
2.2 空域申请
勘察完成后,按照无人机作业要求,对测区航飞进行申请。申请表中写明了航摄时间、航摄范围及航摄高度等信息,按照流程进行申请,得到了批准。
2.3 无人机选择及航线规划
由于测区高差约20 m,采用四旋翼无人机搭载5镜头倾斜相机即可完成影像数据的采集。航飞高度80 m,航向、旁向重叠度均设置为85%,地面影像分辨率0.013 m,具体规划的航线示意图如图2。

图2 航线规划图Fig.2 Route plan
2.4 控制点测量
为了提高成果精度,点位采取喷涂方式进行。采用红色油漆,间隔200 m左右,均匀地在地面上喷涂大小为80 cm的对三角形,点位采集在2个三角形对接的地方。要求采集的点位均为固定解,且每个点位至少采集3次,每次采集的点位较差均小于1 cm。共采集控制点45个,检测点23个,实地采集控制点的照片如图3所示。

图3 控制点实地点位图Fig.3 Control point field map
2.5 影像数据获取
在确保安全的情况下,按照空域批准文件要求,进行无人机的起飞与影像数据的获取。正式作业前,需对电池安装、螺旋桨安装等进行检查,在地面进行试拍,确保内存卡可以正常写入数据,POS记录装置正常运行。在完成航飞前检查后,通过地面站和遥控器控制无人机起飞,按照规划好的航线完成任务区影像数据的获取,共获得8 545张有效影像。
2.6 数据预处理
冗余影像剔除。结合飞机飞行方向、航线与相机安装之间的关系,在不影响模型成果的前提下,手动删除无效影像1 580张,剩余6 965张影像用于空三解算和模型生产。
POS与影像不对应改正。以下视相机获得的POS为标准,利用matlab软件开发的POS解算工具,对4个侧视镜头的POS进行解算,使得POS和影像一一对应。
影像畸变处理。5个相机在出厂时已经进行了检校,在作业时,并未对相机再次进行检校。考虑到侧视相机获取的影像畸变大,对成果精度有一定的影响,为了提升成果精度,提高空三通过率,随机选取连续的300张影像(5×60)进行空三解算,在完成相对定向后,得到了精度较高的相机参数,利用高精度相机参数来去除影像产生的畸变。
2.7 空中三角测量解算
空三解算在内业数据处理中是最重要的一个环节,空三的结果直接决定后期模型的精度。作业时,利用预处理后的成果,进行空中三角测量解算。解算时,采用Bentley 公司的Context Capture Center软件进行,主机配置内存为128 G,辅机电脑配置为64 G,利用集群技术进行空三解算,平差环节由主机独立完成。在数据解算结束后,通过人机交互的方式查看空三成果的质量,通过查看,空三成果符合实际情况,空三报告中加密点中误差为0.011 m,成果精度符合规范要求。
导入控制点,采用人机交互的方式对控制点进行转刺。对测区边缘和中心的控制点进行转刺,进行平差,再对剩余的点位进行转刺并平差,对精度不符合要求的点进行微调,直到所有控制点精度均符合规范要求。
2.8 实景三维模型生产
实景三维模型生产主要涉及瓦片大小、输出坐标系设置和输出格式等。本次集群电脑中,内存配置最低的为64 G,因此在瓦片设置时,设置其大小为200 m,所需内存约30 G,未超过内存的1/2,这样可以尽可能在减少瓦片失败的同时提升建模效率。为了尽可能保留建构筑物的棱角结构,在输出模型结构优化时,设置为0 m,这样输出的模型其棱角保留较为完整。模型输出坐标系和控制点坐标系设置一样,确保输出成果可用。设置模型格式为OSGB,这种格式存在多层级金字塔,主要用来进行模型成果查看和地籍图测绘,部分输出的模型成果如图4所示。
在模型输出后,设置OSGB模型的索引文件,利用Smart3D Capture Viewer打开模型,对模型成果进行查看,主要检查模型有没有分层,模型有没有严重拉花导致无法进行地籍图测绘的情况。
在生产完模型后,再次设置参数,选择真正射影像进行输出。格式选择tif,分辨率设置0.05 m,由于是基于模型输出的真正射影像,所以很快就完成了真正射成果的输出,部分成果如图5所示。
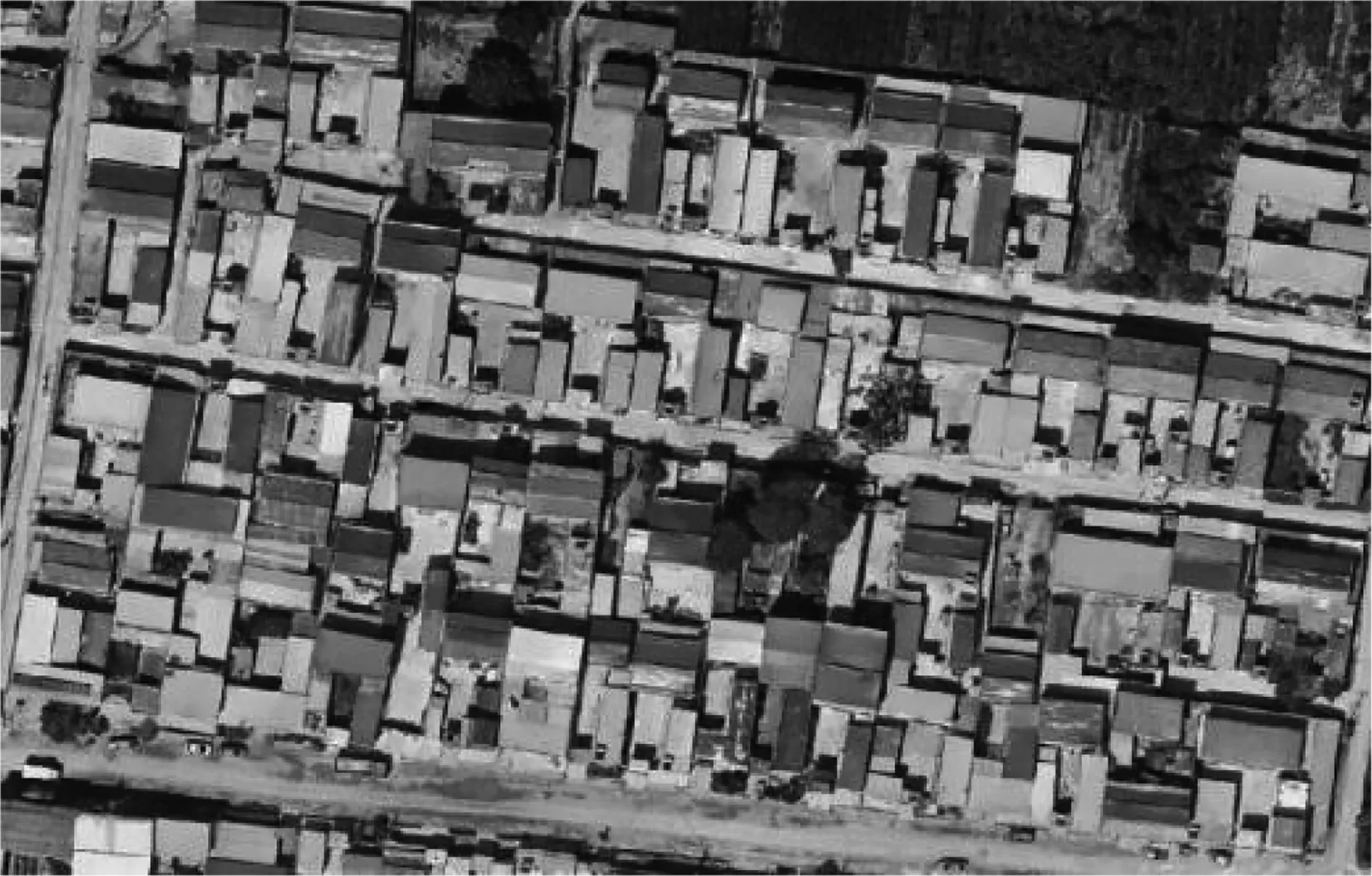
图5 部分数字真正射影像成果Fig.5 Result of some real projection of numbers
2.9 地籍图采集入库
利用北京清华三维EPS软件进行地籍图采集及入库。进入软件,在三维测图模块下点击“OSGB数据转换”,加载对应的模型成果和xml文件,进行转换。转换完成后,选择定制版的房地一体项目对应的数据库,将模型和真正射影像加载到软件中,进行房屋及其宗地的测绘。为了提高采集效率,在采集规则的矩形房屋时,采用软件中自带的“五点房”命令,这样不但采集效率高,且采集的房屋夹角为直角,符合实际情况。针对不同房屋,采用不同方式进行采集,并在采集过程中完成相对应的属性填充。采集完成后,利用软件中质检模块对采集的成果进行质检,根据质检情况,修改质检中的错误,直到通过软件的质检,采集的部分地籍图成果如图6所示。
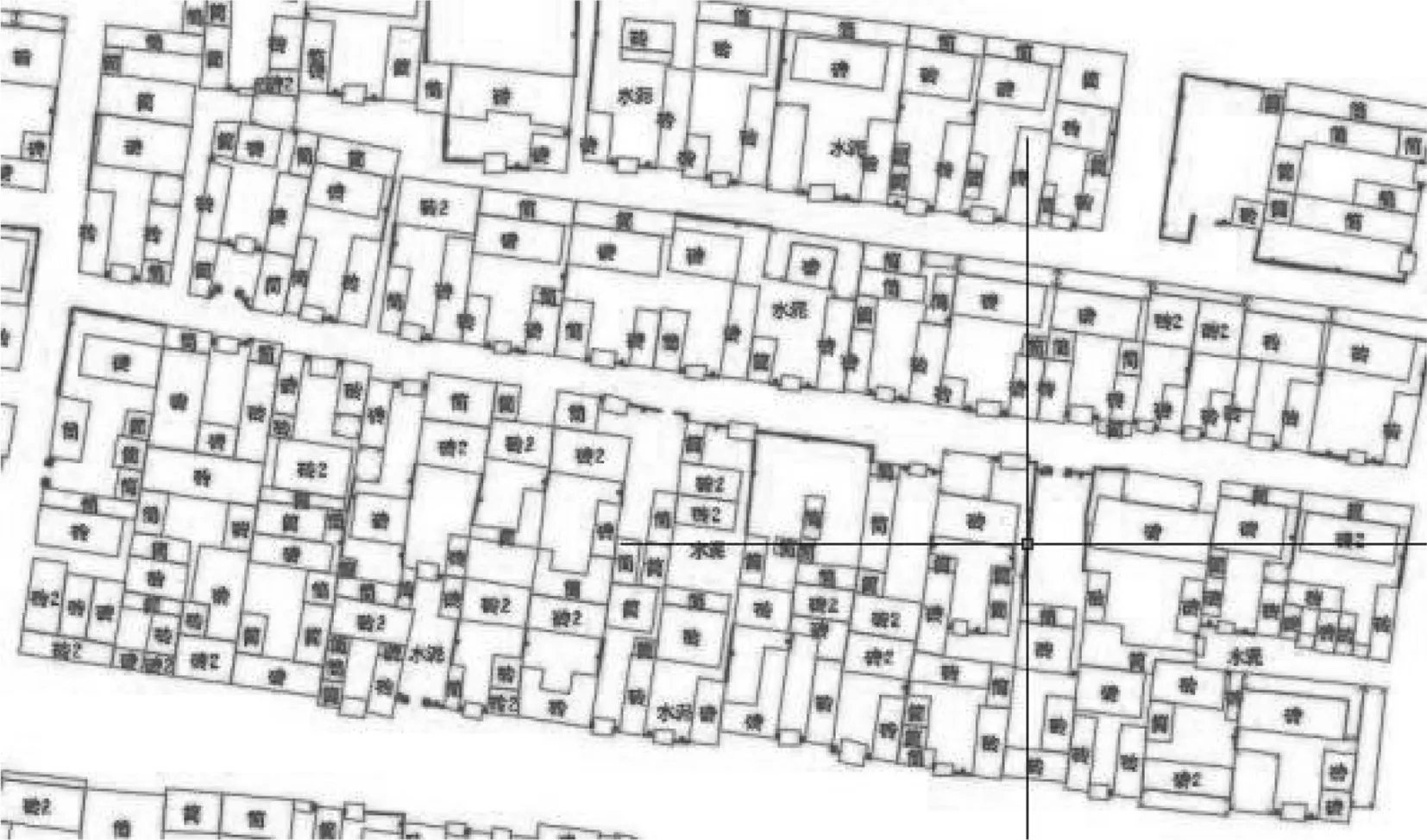
图6 部分地籍图成果Fig.6 Result some cadastral map
2.10 精度评定
采用高精度中误差检测方法,对23个检测点进行精度检测,检测统计结果见表1。

表1 检测点检测精度统计表 cmTab.1 Statistical table of detection accuracy of detection points cm

点号较差DX较差DY较差DSJC132.63.64.4 JC142.74.14.9 JC152.93.14.2 JC163.53.14.7 JC173.82.24.4 JC184.52.65.2 JC194.13.55.4 JC205.54.37.0 JC213.32.64.2 JC224.83.86.1 JC234.93.3 5.9
通过上表可以看出,23个检测点中,X方向和Y方向最大的残差分别为±5.5 cm和±4.9 cm,XY方向最大残差为±7.0 cm,23个点的中误差为±2.3 cm,均未超过地籍规范要求,表明本次成果精度良好,成果可用。
3 结语
对采集的检测点进行精度检测,结果表明:采用本方法生产的地籍图,检测点平面位置中误差为±0.023 m,成果精度可以满足地籍规范要求,可以为农村房地一体项目的开展提供参考。
猜你喜欢
现代苏州(2022年9期)2022-05-26
文萃报·周五版(2022年9期)2022-03-11
铁道勘察(2021年6期)2021-12-27
全球定位系统(2021年1期)2021-03-26
小读者之友(2020年8期)2020-09-01
中国报道(2019年8期)2019-08-29
浙江工业大学学报(社会科学版)(2019年2期)2019-07-08
科学与财富(2018年28期)2018-11-16
当代贵州(2018年21期)2018-08-29
北京航空航天大学学报(2017年4期)2017-11-23