
基于三维激光的车辙表面纹理特征研究
2022-07-06 08:03陆树荣
中外公路 2022年3期
陆树荣
(湖州市交通规划设计院, 浙江 湖州 313000)
车辙是道路轮迹带处由车辆荷载所引起的纵向持久下凹变形,表现为路面上留下的车轮的压痕,轮迹处的深度是衡量路面受车辙破坏程度的一个重要指标。车辙是高等级路面上最常见的病害之一,若车辙病害严重到一定程度将影响乘车舒适性和行车安全性;同时它也是路面进一步破损的诱因,若不及时养护,当沥青的延展性达到极限时可能造成其他病害龟裂、块状裂缝、松散等的产生[1]。
对车辙的传统研究主要是在道路检测方法的探究上。路面车辙检测的方法从形式上大致可以分为接触式和非接触式两种。接触式测量是把检测设备与路面直接接触进行检测,记录相对应的数据。主要检测设备有:路面横断面仪/尺,精密水准测量仪,表面高程计等。非接触式检测的设备传感器不与被检测的路面直接接触,可快速地进行车辙检测,主要的检测方法有超声波检测和激光检测[2-3]。其中,激光检测又分为点激光和线激光[4-5]。目前主要研究集中在激光线的提取方法,如图像处理方法和光条灰度重心法。2013年,李莉和孙立军[6]等提出了适应沥青路面纹理特征和技术状况的线结构光图像处理流程,包括路面横断面曲线提取和车辙特征参数提取。其中路面横断面曲线提取由光心提取、光心连接和光心曲线平滑实现;2015年,张磊[7]通过图像去噪以及准确地提取出光条中心坐标来实现图像处理,采用最小二乘法解二维成像方程来进行系统标定。
激光检测主要用于检测路面构造深度[8],路面表面纹理以预测沥青路面性能[9]。然而,目前诸多的研究都没有涉及对车辙表面纹理特征的研究,随着基于激光的3D相机技术的发展和精度的提升,研究对象不断精细化,为探究车辙表面纹理提供了理论支持,对车辙表面纹理的检测有助于路面养护决策[10-11]。该文采用精度为1 mm的激光深度相机对车辙的表面纹理特征进行探究,并设计对照试验与原始路面进行对比,观测车辙在细观结构的变化,为进一步精细化研究车辙提供理论依据。
1 数据采集方法与流程
1.1 试验设备
采用Ranger3高速3D 相机,通过激光束三角测量法测量物体 3D 形状,测量经过相机视域的物体,然后把测量结果发送至计算机进行再处理。可通过计算机启动与停止测量,并由编码器与光电传感器在视觉系统中予以触发。在每次测量中,3D 相机沿着面前物体的剖面进行测量。测量结果是轮廓图,其中包括沿着剖面每个测量点的数值——例如沿着宽度的物体高度。若要使相机测量整个物体,则应移动物体(或是相机与光源),使相机能沿着物体实施一系列测量。此类测量的结果是一系列轮廓图,其中每份包含沿着输送方向的特定位置剖面测量。
1.2 试验过程
(1) 制作车辙板试件(300 mm×300 mm),并在其上方进行小型加速加载试验。
(2) 对试验完毕的车辙板进行扫描。摄像头由吸盘固定住,线激光发射器由支架固定并垂直向下,二者保持不动,车辙板在移动平台的带动下与摄像头进行相对运动。
(3) 数据标定。对采集的试件采用锯齿标定法进行标定。通过单锯齿的齿宽和齿高标定轮廓的x方向和z方向的值,y方向的值通过编码器或者内部时钟获得。标定后的数据在软件中进行模型重构。
(4) 数据切割。将每块车辙板通过标记点进行区域分割,将一块车辙板分成多个分区,对是否为车辙面贴上标签。
(5) 数据导出。通过相机自带软件将采集的数据设为文本格式,数据格式为带有x、y、z3个坐标轴的点云数据。
1.3 数据预处理
使用的数据处理软件为Matlab,将点云数据读入后,需要进行以下预处理:
(1) 数据网格化:原始点云是离散的,无法进行有效的矩阵运算。因此,该文根据切割的数据样本大小,划分了1 260×760个以0.1 mm为间隔的网格,并通过插值的方法填充网格数值。
(2) 数据降噪:由于路面纹理的深陷点会受到遮挡,因此在一些凹槽处会出现数据缺失或异常的现象。该文采用二维中值滤波对数据进行降噪,将每一点的z值设置为该点某邻域窗口内的所有z值的中值。
2 表面特征纹理参数
选用平均构造深度MPD以及纹理的功能和体积参数对路面表面特征进行描述。
2.1 平均构造深度MPD
平均构造深度MPD是最为广泛使用的路面纹理参数之一。将获取的路面断面轮廓曲线均分为100 mm的曲线,计算每段曲线的断面深度,把所有断面深度平均值称之为平均断面深度。其计算方法如图1所示。
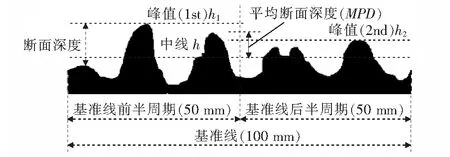
图1 MPD计算示意图
2.2 功能参数
由于车辙存在集料压缩的情况,因此,体积参数可一定程度反映压缩的情况。体积参数是通过负载轮廓计算得出的参数。负载面积率是指某个高度h以上的区域面积与全体的比例。沿着负载轮廓从负载面积率0%起,取负载面积率的差为40%的负载轮廓割线,割线斜率最平缓的位置叫做负载轮廓的中央部分。与纵轴方向偏差的平方和最小的直线叫做等价直线。从测量表面的定义区域中,去除等价直线负载面积率0~100%高度范围区域之外的部分后的表面叫做中心部。从中心部向上突出的部分叫做突出峰部,下陷的部分叫做突出谷部。中心部、突出峰部、突出谷部的定义如图2所示。
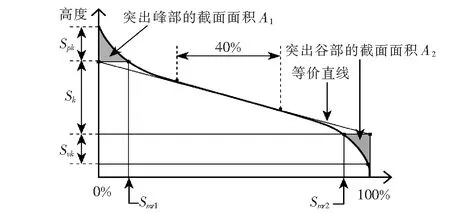
图2 中心部、突出峰部、突出谷部示意图
利用Matlab进行计算,首先根据已有的三维坐标数据绘制出负载轮廓,为实现计算的便捷,考虑到利用3D相机扫描的优势——数据的充沛性(每76 mm×126 mm有60余万个坐标点),将负载面积率这一比率转化为坐标点个数的比例。
得到负载面积率-高度曲线之后,根据等价直线的定义,寻找曲线上割线斜率最平缓的位置(中心部分),相对于中心部分的直线即为等价直线。最后,利用负载轮廓与等价直线,按照表1参数的定义计算各项功能参数。
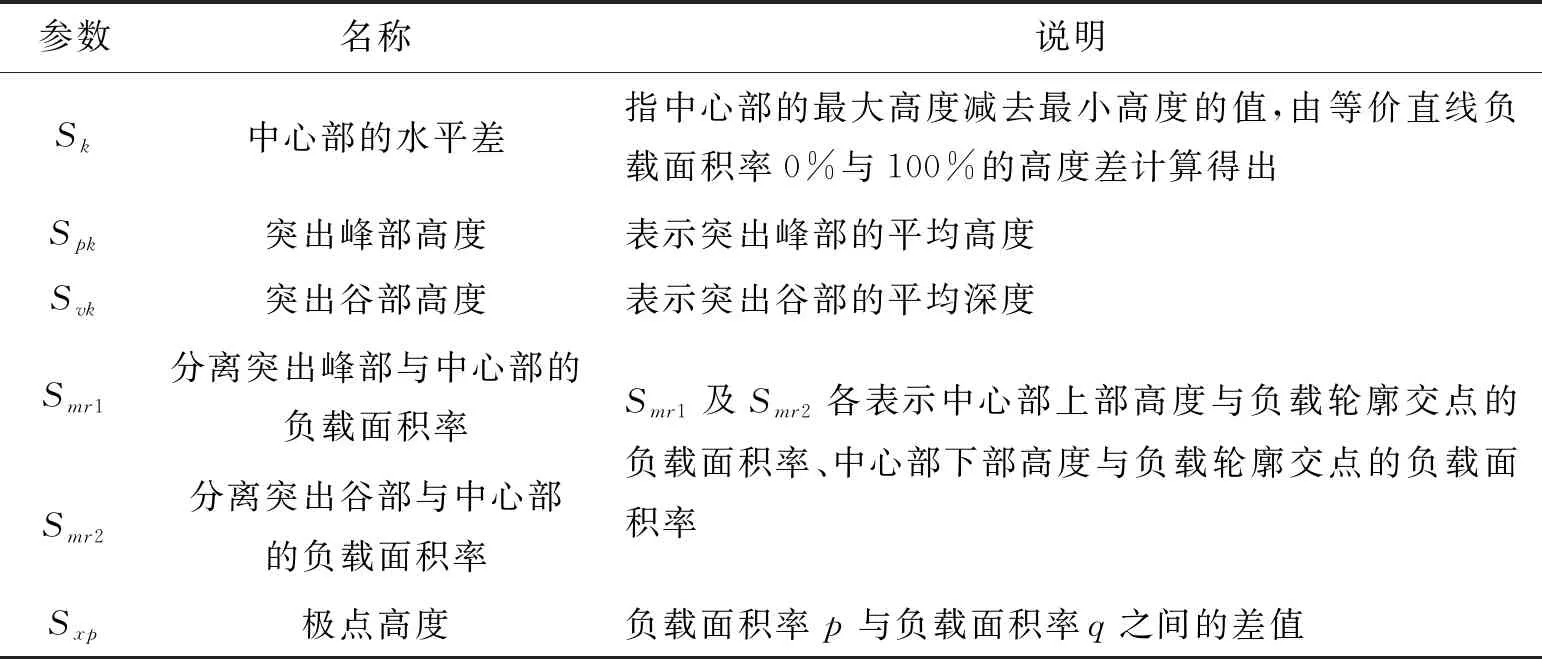
表1 功能参数定义
2.3 体积参数
体积参数是使用负载轮廓计算出的与体积、容积有关的参数。各项体积参数可转化为负载面积率-高度曲线图中对应部分的面积,如图3所示。定义中实体体积与空隙体积均为每单位面积的体积,即为体积与总面积之比,而体积为高度与对应面积的乘积,面积负载率为区域面积即对应面积与总面积的比值,不难得出体积参数为高度与负载面积率的乘积。则实体体积或空隙容积即为负载轮廓曲线图的面积,利用Matlab进行积分等计算得出。体积参数的定义如表2所示。
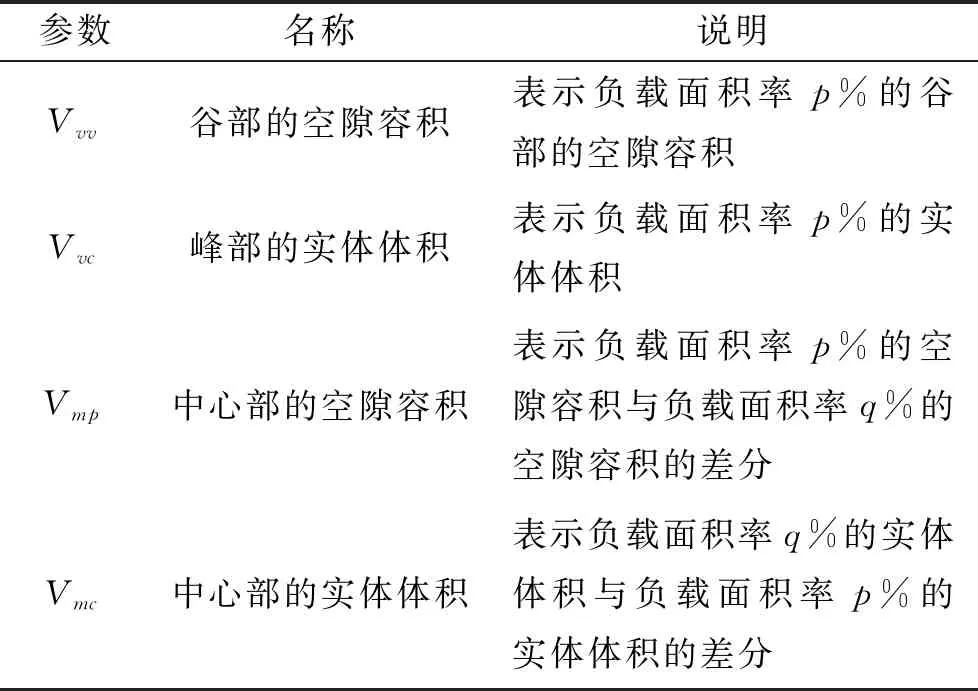
表2 体积参数定义
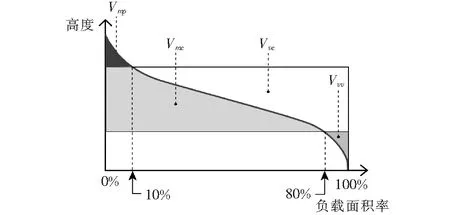
图3 体积参数示意图
在使用体积参数时,必须指定分离中心部与突出峰部的负载面积率(Smr1)、分离中心部与突出谷部的负载面积率(Smr2)。但通过功能参数已经计算出Smr1与Smr2的具体数值,因此直接利用计算功能参数得出的Smr1与Smr2进行体积参数的计算。
3 结果分析
试验选取了4块不同级配的车辙板进行试验,每块车辙板分为3个区域,区域1、2为没有车辙的路面,即原始路面。区域3为有车辙的路面。MPD和功能参数及体积参数的计算结果如表3所示。MPD的计算结果显示:无车辙的MPD比有车辙的数值较小。而对于功能参数,Sk、Spk和Sxp没有表现出统一的规律,而有车辙的Svk值普遍小于无车辙的值。体积参数的计算结果显示:有车辙的Vvv值明显小于无车辙值,而其他参数并无明显规律。
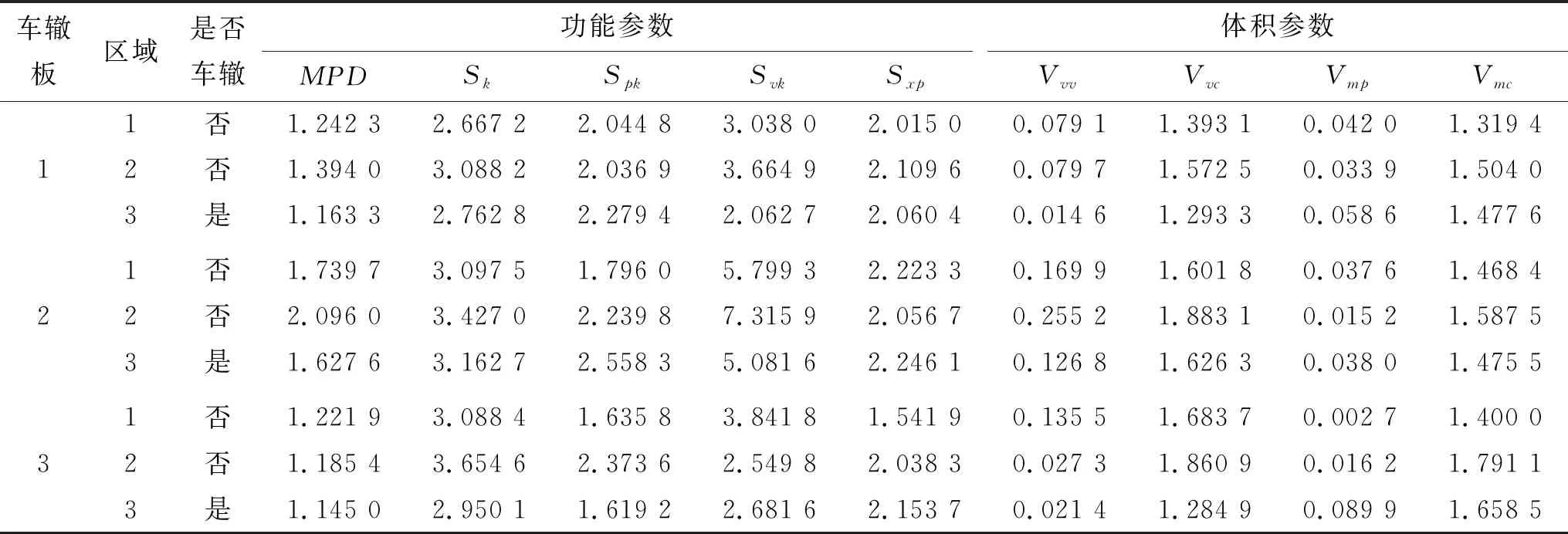
表3 MPD和功能参数及体积参数的计算结果

续表3
由表3可以看出能较好地区别有无车辙的表面特征参数为MPD、Svk和Vvv,均是有车辙的比无车辙的小。而其他参数并不能很好地看出有无车辙的差别。
4 车辙预测模型
根据上述分析,选取了MPD、Svk和Vvv作为参数建立车辙的判断模型,将有车辙的设为标签1,无车辙的设为标签2,通过支持向量机(SVM)对车辙进行预估,利用5折交叉检验的方法计算车辙判断的准确度为91.7%,AUC值为0.81。图4为SVM分类器的结果,其中·代表预测正确,×代表预测失败(由于试验数据较少,在之后的研究中需补充更多的试验数值以验证其准确率)。
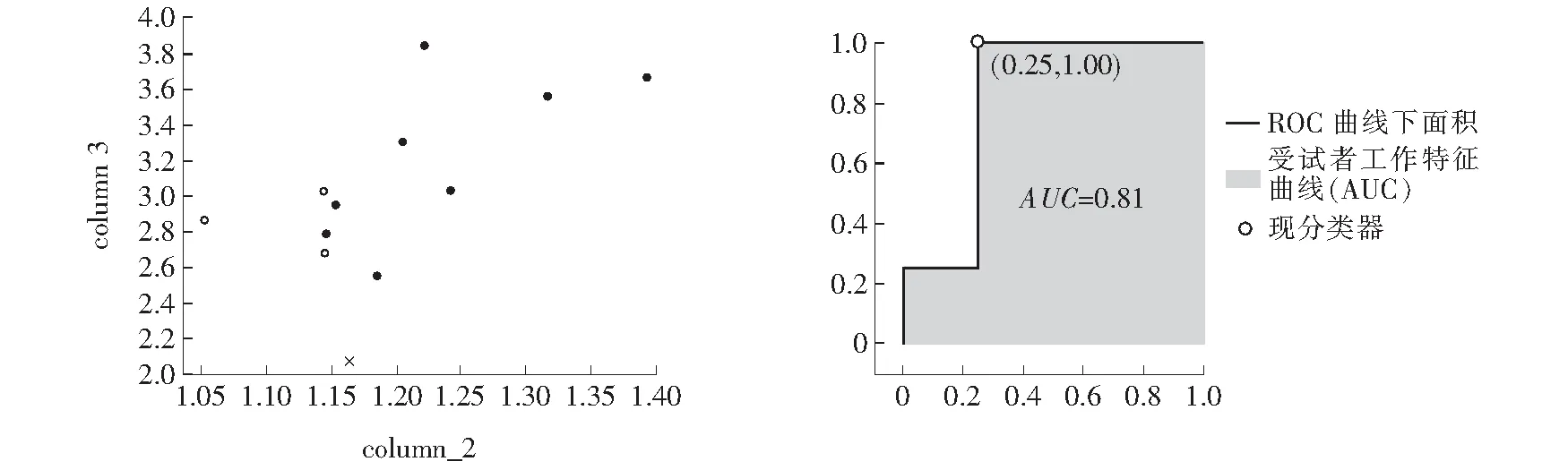
图4 SVM预测结果
5 结语
通过试验模拟车辙的形成过程,计算车辙的表面纹理特征参数,与无车辙的结果进行数值对比。经计算结果分析,平均构造深度MPD、突出谷部高度Svk、谷部的空隙容积Vvv能较好地区分有无车辙,有车辙的MPD、Svk和Vvv数值均小于无车辙。利用这三者为主要参数建立SVM的车辙判断预估模型,判断准确率可达91.7%。
猜你喜欢
趣味(作文与阅读)(2021年9期)2022-01-19
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
中学生数理化·高一版(2020年11期)2020-12-14
山东交通科技(2020年1期)2020-07-24
北方交通(2020年4期)2020-06-01
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
家庭影院技术(2018年4期)2018-05-09
Coco薇(2017年8期)2017-08-03
幼儿智力世界(2016年11期)2017-02-21
