DiscoverTM假体高度对颈椎人工椎间盘置换术置换节段生物力学影响的三维有限元分析
2022-07-05 12:58刘伟聪周盛源贾连顺陈雄生
脊柱外科杂志 2022年3期
刘伟聪,周盛源,陈 博,苑 博,贾连顺,陈雄生
1.湖南师范大学第二附属医院骨科,长沙 410000 2.海军军医大学长征医院骨科,上海 200003 3.上海市伤骨科研究所,上海 200003
颈椎人工椎间盘置换术(CTDR)理论上同时具备重建和保持病变节段活动度(ROM)、防止或减少邻椎病的发生与发展、重建椎间高度和恢复手术节段生理曲度的优点[1-3]。手术节段异位骨化(HO)是目前CTDR术后主要并发症之一[4-5],其病因学至今未得到阐明。有研究[6-9]认为,生物力学因素会刺激HO发生,应力或载荷异常与HO形成相关。人工椎间盘的尺寸选择和置换节段的椎间隙高度对于HO形成、ROM的影响尚未明确。本研究通过三维有限元方法建立采用不同高度DiscoverTM假体行CTDR的颈椎模型,比较不同高度假体对颈椎ROM、假体与骨终板接触面应力分布的影响,探讨CTDR术后HO的发生机制及其影响因素,为优化CTDR手术方案、改善术后疗效提供理论依据。
1 材料与方法
1.1 原始模型
选择一位健康成年男性志愿者,年龄29岁,身高171 cm,体质量69 kg,无颈椎疾病史及外伤手术史,经X线检查及CT二维平面扫描无明显颈椎退行性改变。利用CT薄层扫描获得的原始数据模拟计算,建立C0~ T1全颈椎三维有限元模型,该模型在各个方向上的ROM及力学特性与既往文献资料[10]相符,通过模型验证。
1.2 实验材料、设备及相关软件
3种不同型号DiscoverTM假体(DePuy Spine,美国),高度分别为5、6、7 mm。Light Speed 256排螺旋CT扫描仪(西门子,德国)。计算机硬件为HP Z800工作站(惠普,美国),配置:64位Windows 7操作系统,双四核Intel Xeon W5580 3.20 G/8 M中央处理器,64 G 1333ECC物理内存,900 G容量、转速为15 000 r/min的raid1SAS硬盘,NVIDIA Quadro FX580 1 G图形卡芯片。Solidworks软件(UGS,美国),用于绘制、构建DiscoverTM假体的几何模型;Mimics17.0软件(Materialise,比利时),主要用于构建三角网格模型;Geomagic Studio 2012软件(Geomagic,美国),主要用于开展实体模型的逆向构建;Hypermesh 11.0软件(Altair,美国),辅助有限元分析进行前处理;Abaqus 6.9软件(Simulia,美国),对模型实施有限元模拟分析及相关处理。
1.3 建模方法
采用通用建模软件Solidworks对假体样品的具体组成部件进行测绘并建立三维模型。在不影响基本力学测试分析的前提下,人为对边界条件进行合理设定,对局部条件进行适当简化。根据DiscoverTM假体产品手册及具体模型测量确认关键尺寸(假体有7°的前凸角度)和配合(上下片弧面的配合)。基于高度为5 mm假体样品建立有限元模型,为消除其他影响因素,高度定义为假体上、下片中点的距离,即中间聚乙烯髓核部分高度。在此基础上调整、变形聚乙烯髓核中间的竖直部分,分别建立高度为6、7 mm的有限元模型(图1)。

图1 不同高度假体有限元模型侧面观Fig. 1 Lateral view of finite element models with different heights of prosthesisa:5 mm假体 b:6 mm假体 c:7 mm假体a:5 mm prosthesis b:6 mm prosthesis c:7 mm prosthesis
材料属性设置:皮质骨弹性模量为12 000 MPa,泊松比为0.3;松质骨弹性模量为500 MPa,泊松比为0.3;软骨终板弹性模量为500 MPa,泊松比为0.4;钛的弹性模量为120 000 MPa,泊松比为0.3;聚乙烯弹性模量为3 000 MPa,泊松比为0.3。
本研究按照临床实际操作流程,将5 mm假体设定为初始高度植入全颈椎三维有限元模型的C5/C6节段。按照本课题组在临床中实施C5/C6节段CTDR时对椎间隙的前纵韧带及后纵韧带完全切除的常规操作,本研究在建立模型时同样将对应节段的前纵韧带、椎间盘及后纵韧带完全移除。植入6 mm和7 mm假体时,上、下各1个节段受影响,采用对椎体网格进行Morph变形的方法,按照迭代原理,共同分担撑开的距离及应力(图2)。
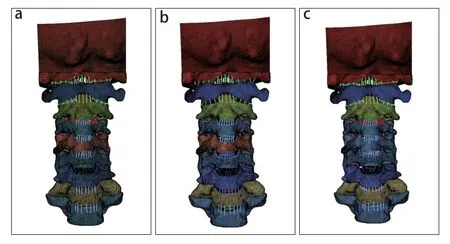
图2 植入不同高度假体的颈椎模型(C5/C6节段)Fig. 2 Cervical models implanted with different heights of prosthesis(C5/C6 segment)a:5 mm 假体 b:6 mm 假体 c:7 mm 假体a:5 mm prosthesis b:6 mm prosthesis c:7 mm prosthesis
将假体的下片凹槽内部与聚乙烯髓核下平面之间定义为绑定关系,上片凹槽面与聚乙烯髓核凸面的关节面之间定义为无摩擦接触关系。上位椎体下表面与假体上片接触部分及下位椎体上表面与假体下片接触部分均定义为绑定关系,默认假体与骨接触面为完全融合状态,在有限元分析过程中不会产生相对位移。
1.4 ROM测量和力学分析
测量置换节段在前屈后伸、左右侧曲及轴向旋转时的ROM。模拟颈椎有限元模型受到前屈、后伸、左右侧曲和左右轴向旋转6种载荷作用,根据右手准则在中性点上施加水平面、冠状面、矢状面上不同方向的1.5 N·m纯扭矩载荷。使用Abaqus 6.9作为有限元运算的求解器和后处理器,对不同高度的假体置换模型进行力学分析。
2 结果
2.1 置换节段和邻近节段ROM
3种高度的假体在不同方向上均能较好地维持或增加置换节段ROM(表1)。

表1 置换节段及邻近节段ROMTab. 1 ROM of replacment and adjacent segments (°)
2.2 假体上、下面接触应力
由表2可见,在前屈时,6 mm假体上、下面接触应力最大,5 mm假体次之,7 mm假体最小;在后伸时,3种假体上、下面均分离,表面没有接触应力;左、右侧曲时,只有7 mm假体上、下面有接触应力,另2种假体上、下面分离,没有接触应力;左旋时6 mm假体上、下面接触应力最大,右旋时5 mm假体上、下面接触应力最大。

表2 假体上、下面接触应力Tab. 2 Upper and lower contact stress of prosthesis MPa
2.3 假体-骨终板接触面应力及上、下终板应力
由表3可见,3种高度的假体均在后伸位的上终板与骨接触面的应力最高;且随着假体高度的增加,假体-骨终板接触面在各个方向上的应力均明显增加。在1.5 N·m载荷条件下,与5 mm假体比较,在后伸位6 mm假体与上、下骨终板接触面平均应力分别增加了52%和260%,7 mm假体增加了242%和720%;在前屈位,6 mm假体与上、下骨终板接触面平均应力分别增加了66%和142%,7 mm假体增加了247%和407%;在左曲位,6 mm假体与上、下骨终板接触面平均应力分别增加了153%和31%,7 mm假体则增加了537%和179%;右曲位结果与左曲位相近。
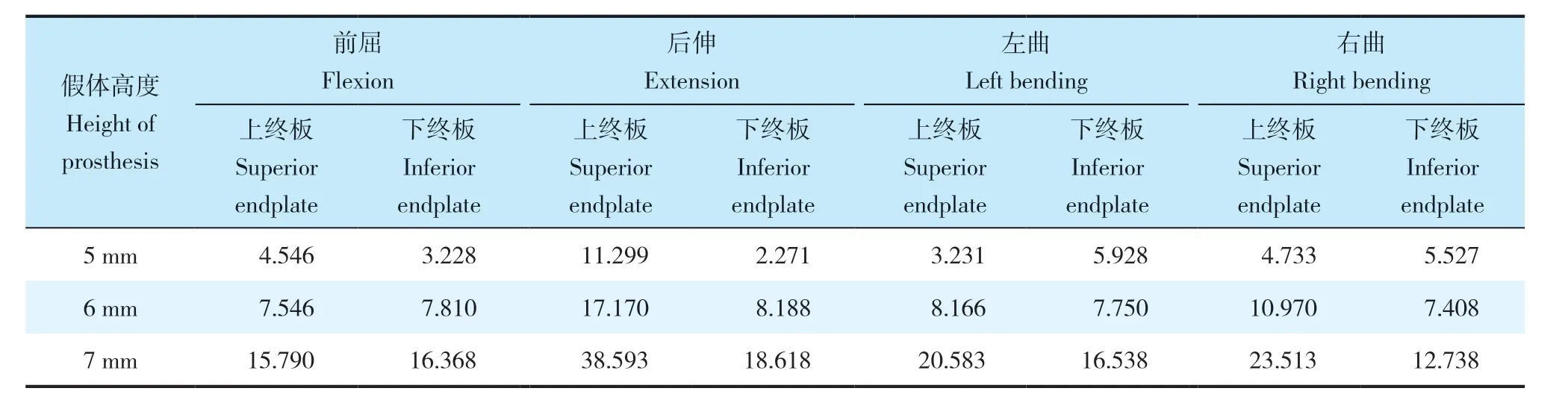
表3 假体-骨终板接触面平均应力Tab. 3 Average stress on prosthesis-endplate interface MPa
不同高度假体在骨终板接触面上应力分布不均,从应力云图来看,在后伸位,5 mm假体与骨终板接触面的应力在上终板两侧最大、后侧最小(图3);6 mm假体与骨终板接触面的应力变化与运动方向基本一致;在后伸位,7 mm假体与骨终板接触面应力在上终板后侧最大(图4),其他方向的应力变化基本与运动方向一致。
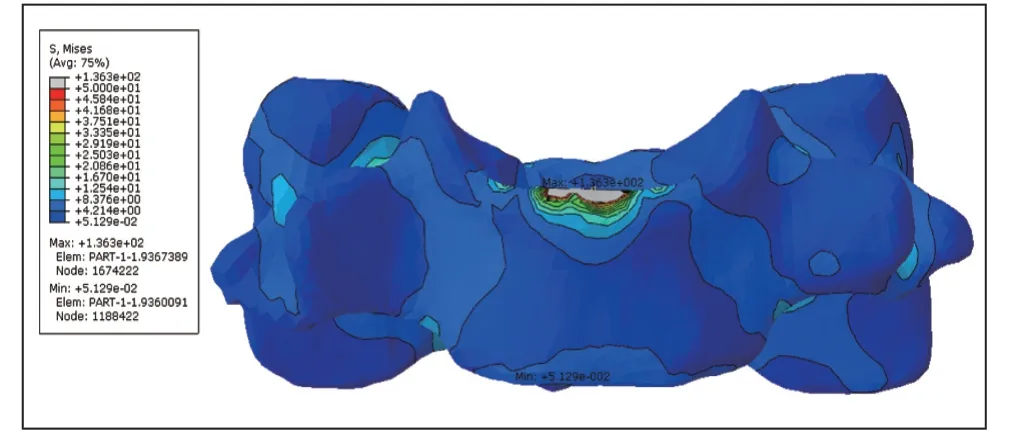
图3 在后伸位5 mm假体与上终板接触面的应力Fig. 3 Stress on upper endplate interface of 5 mm prosthesis in extension position
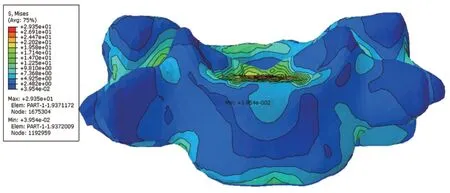
图4 在后伸位7 mm假体与上终板接触面应力Fig. 4 Stress on upper endplate interface of 7 mm prosthesis in extension position
2.4 邻近节段应力
由表4可见,在前屈位上,邻近节段应力随假体高度的增大而减少,在后伸、左右侧曲及左右旋转时,相邻节段应力则随着假体高度的增大而增大。
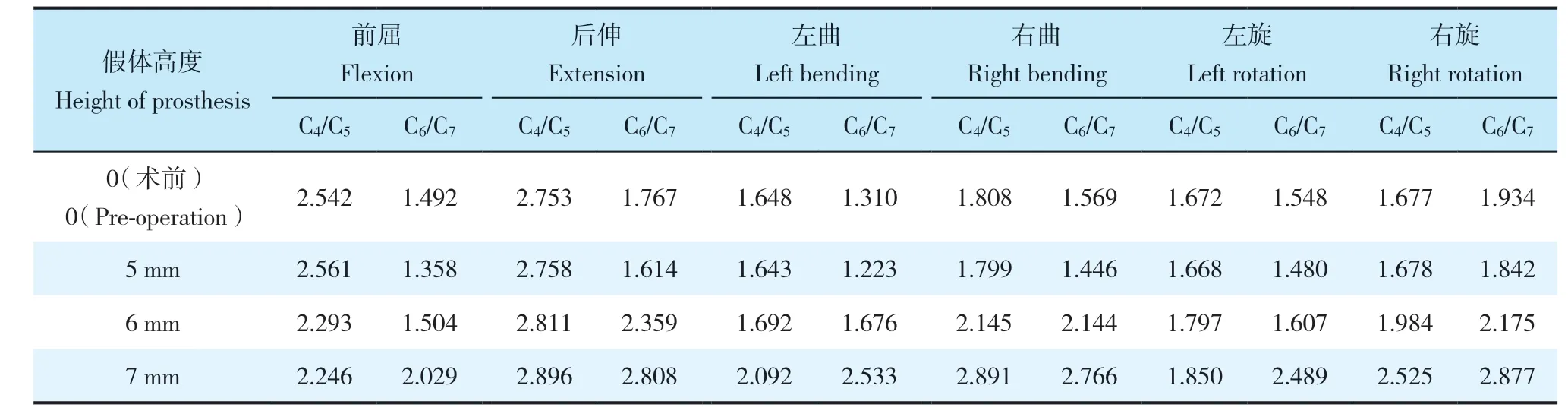
表4 邻近节段应力Tab. 4 Stress of adjacent segments MPa
3 讨论
CTDR以保留局部节段ROM及降低邻近椎体病变发生率为主要目标。对CTDR术后颈椎各个方面的力学情况变化进行测试和评估,有助于疗效评估及假体和手术方式的改进。相对于其他类型的力学模型,三维有限元模型在研究颈椎内部的压应力及张力等生物力学方面有着独特的优势。
Faizan等[11]通过比较球窝型、三明治型、弹性型假体发现,三明治型和弹性型假体植入模型都比自然状态颈椎模型的ROM大,并发现假体远端为圆球形假体应力要比卵圆形假体的应力更高,而远端为卵圆形的假体置换节段产生的运动、小关节面应力、假体应力和关节囊韧带应力更接近于自然状态,这也可能是假体能减少磨损、维持长期寿命及临床疗效的主要原因。本研究所采用的DiscoverTM假体为圆球形位于远端的球窝关节型假体,由上、下金属终板和中间的圆球形聚乙烯关节组成,在1.5 N·m的载荷下,假体内部关节接触面压强为4 ~ 34 MPa,术后接触面应力大于卵圆形假体,其长期随访临床疗效及磨损情况尚需进一步研究。Pickett等[12]确定前屈后伸、左右侧曲、轴向旋转的旋转轴是脊柱运动学与生物力学研究中的主要问题。Rousseau等[13]在51例患者中分别使用非限制型Prestige LP假体和半限制型Prodisc-C假体行CTDR,术后影像学结果表明,大部分患者前屈后伸活动的旋转轴都在正常范围之内,同时相较于正常的生理旋转轴位置来说,假体重建后的旋转轴有趋向前上方的倾向性,尤其是在Prestige LP假体表现更为明显,因为它采用的是非限制型设计,其球面具有更加向上的几何中心,具备更好的灵活性。本研究使用的DiscoverTM假体采用的是10 mm大直径球窝,旋转中心与Prestige LP假体相似,本研究发现DiscoverTM假体置换后手术节段在部分方向上的活动度有明显增加,并随着假体高度增大而逐渐增大,而且部分方向增加的活动范围甚至达到正常值的2倍,这与DiscoverTM假体为非限制型假体、设计初始的ROM较大有关。
Dejaegher等[14]通过局部解剖结构的应力和载荷研究发现,假体植入引起的局部骨组织的非生理性应力改变是导致手术节段及邻近节段解剖结构退行性变加重的直接原因。CTDR术中切除了前方的韧带和纤维环,术后颈椎常在后伸位出现不稳的情况,这种改变可能会导致关节突关节的应力增加和邻近节段椎间盘应力的减少[15]。Kim等[16]也发现,置换节段手术前后高度变化和ROM变化较大的患者发生重度HO的概率要明显高于手术前后变化较小的患者。而使用不同高度的假体会直接影响手术节段术后高度和ROM变化。本研究发现,随着假体高度的增加,假体-骨终板接触面在各个方向上的应力明显增加;且除了前屈位之外,邻近节段在其他方向上的应力也随着假体高度的增加呈现升高趋势。有研究[17-18]采用骨三维重建有限元模型进行计算,使用应变能密度作为机械性刺激因素,结果发现,总的应变能量在骨化物出现后大大减少,不论在前屈位还是后伸位,上位椎体应力减小比下位椎体明显。Ganbat等[19]通过一个简单的单个C6椎体二维有限元模型对CTDR术后2种较为常见的HO类型进行了模拟,通过在不同垂直压应力和剪切力的作用下,分析不同类型HO形成的力学机制,得到了与临床研究一致的结果,证实HO的形成与CTDR术后颈椎外部负荷有关。此外,研究还对CTDR术后在机械载荷条件下出现HO的形状、位置、数量进行了分析,认为骨化物易产生在椎体终板未被假体覆盖的位置,且与载荷大小及方向密切相关,而随着骨化物的出现,总的应变能量会明显减少[20]。本研究发现,不同高度假体在骨终板接触面上的应力分布明显不均。3种高度假体的骨终板接触面应力均在后伸位的上终板最高;在后伸位时,5 mm假体与骨终板接触面应力在上终板两侧最大、后侧最小;6 mm假体与骨终板接触面应力变化与运动方向基本一致;7 mm假体与骨终板接触面应力在上终板的后侧最大,这与上述报道[20]中HO形成的位置一致。不一致的应力分布造成了假体周围皮质骨和松质骨的微结构损伤,微损伤诱导了骨凋亡,进一步激活成骨细胞和破骨细胞活性,导致骨吸收和骨形成,这种情况一直持续到局部应力下降到一定水平为止,骨形成的微环境在骨重建过程中趋向稳定状态,在没有应力刺激的情况下,骨重建停止[20]。上述结果都显示,应力对骨化物的形成有重要影响。因此,在维持合适椎间高度的前提下,手术过程中应选取高度相对较低的假体,减少假体与骨终板接触面应力,以减少术后HO及邻近椎体退行性变的发生。
本研究的局限性在于简化了边界条件,并且线性弹力模量的材料属性根据以往的研究确定,没有获取完全对应的体外标本实验数据进行对比。使用真实的非线性、超弹性或多相性的模型能进一步提高研究的精确度和可信度,全颈椎模型虽然能在一定程度上提高精确度,但日常活动复杂的应力,如肌肉力量、韧带的作用等,也需纳入考虑范围,有待今后进一步研究。
猜你喜欢
临床骨科杂志(2022年3期)2022-11-24
健康研究(2022年5期)2022-11-07
中国典型病例大全(2022年12期)2022-05-13
中国典型病例大全(2022年9期)2022-04-19
健康体检与管理(2021年6期)2021-11-17
中国药学药品知识仓库(2021年18期)2021-02-28
中国典型病例大全(2021年15期)2021-01-10
设计(2020年24期)2020-01-25
中外医学研究(2019年18期)2019-08-19
医学美学美容(2016年8期)2016-10-18