一种引入不完全微分PID 控制算法在温控系统中的应用
2022-07-04 07:43姚立平吴文明姜杨阳谭仲威
科技创新与应用 2022年19期
姚立平,吴文明,姜杨阳,谭仲威
(广东省科学院健康医学研究所,广东 广州 510500)
温度是工业生产中较为关键的参数,任何的物理变化和化学反应都和温度密切相关。因此,对温度的调节控制是生产自动化的重要任务[1-2]。同时,温控系统具有时变性、非线性及纯滞后性等特点,所以精确的数学模型无法建立,为此许多学者将智能控制理论引入到这类非线性系统的控制中[3-5]。由于PID(Proportional,Integral,Differential,PID)温控算法具有稳定无静差、鲁棒性强等优点,是温控系统中一种应用最广泛的典型控制方式[6-7]。文献[8]使用常规的位置式PID 实现温度控制调节,其控制方法相对简单且易于实现,但是常规PID 调节中引入的积分环节如果累积了较大的偏差值,会引起系统较大的超调从而引起系统的不稳定;针对此问题,文献[9]对常规的PID 温控算法引入了积分分离的优化方法,进行了仿真研究,结果说明了引入的积分分离的PID 控制系统减少了振荡,改善了温控效果;为了保证被控部件快速达到目标温度并进入稳定状态,有效地缩短温度调节的过渡时间,提高系统的温度控制性能,文献[10]使用Bang-Bang 和PID 复合控制算法实现对红外探测器的温度控制,但受Bang-Bang 控制的阈值设定限制。当阈值取太大时,会造成系统的超调;反之阈值如果取得太小,则不能充分发挥其Bang-Bang 控制的作用。在PID 控制中引入的微分环节可改善系统的动态特性,但同时也引入了高频干扰,引起系统调节的温度不稳定;基于此,本文引入了不完全微分的PID 温度调节控制方法,在PID 算法中加入一阶惯性低通滤波器,改善原来的微分项。设计了一款以STM32 为控制核心的闭环温度控制系统;包括有四线制的铂电阻Pt1000 和MAX31865 的温度采集转换电路、半导体制冷器TEC 和H 桥逻辑驱动电路、液晶屏、声光指示电路、无线传输电路等;温度信息无线传输到计算机软件端,计算机软件端使用改进的PID 实现了系统的温度控制调节。
1 温控系统方案设计
本文设计的温度控制系统的系统方案如图1 所示。以ARM Cortex R-M7 内核的STM32F103 微处理器为控制核心,采用四线制的铂电阻 Pt1000 和MAX31865 温度采集转换电路进行温度采集和转换;采用的铂电阻具有体积小、测量精度高、稳定性好等特点,采用的MAX31865 包含15 bit 高分辨率的Σ-Δ型ADC,微处理器使用SPI 通信获取实时的数字温度信息;选用半导体制冷器ATE1-TC-127-8AH 作为系统的循环冷热元件,是一种利用半导体材料构成P-N结,形成热电偶对,产生帕尔贴效应的热电制冷技术,该制冷片外形尺寸39.7*39.7*3.5 cm,最大输入电压为16.2~17.5 V;最高升温温度可达200℃,超长使用寿命,常用于冷热循环设计系统,通过改变制冷片的电流方向来实现制冷片的制冷加热功能。选择满足电压要求的H 桥逻辑控制驱动电路控制不同的电流方向实现半导体制冷器的加热或者是制冷,使用PWM 模式驱动半导体制冷器。通过产生不同时间的高低电平使得半导体制冷器处于开关状态,由此通过改变PWM的占空比来控制半导体制冷器的工作时间,从而控制了半导体制冷器的制冷效率。液晶屏实时显示当前的温度和调节功率,按键触发记录当前的PID 参数,具有温度异常检测报警功能和运行状态的灯指示功能,与上位机软件进行无线通信传输温度信息。基于以上设计的硬件系统和引入了不完全微分的PID 温控算法理论,上位机软件通过无线通信接收实时的温度信息,与设定的目标温度进行PID 调节,将一次的PID 控制器输出值经过无线传输给下位机系统,作为PWM 的占空比进而调节半导体制冷器的工作功率,实现了一次闭环的温度调节控制。

图1 设计的温度控制系统的系统方案
2 温度控制算法
温度控制系统具有滞后性、时变性和非线性等特点,因此精确的数学模型无法建立,工程上常用的PID算法是长期的工程实践中总结形成的一种控制方法,其原理简单易于实现,具有参数整定方便、结构改变灵活、鲁棒性强等优点,是在温度控制中应用最广泛、最基本的一种控制方式[11-13]。
2.1 位置式PID 算法
具有比例-积分-微分环节的控制器称之为PID 控制器[14]。连续的控制方程可表示如下:

式中:u(t)为控制器输出作为系统PWM 的占空比,e(t)为温度的偏差值,Kp为比例系数,TI为积分系数,TD为微分系数。
由于计算机处理的是数字量,因此将式(1)进行离散化,得到数字PID 的控制规律表达式如式(2)所示。

其中:k为采样序列号,u(k)为采样时刻为k的PID 调节输出值,e(k)为采样时刻为k的输入温度偏差值,e(k-1)为第(k-1)次采样时刻的输入温度偏差值,Kp为比例系数,TI为积分系数,TD为微分系数。
比例环节成比例地反映控制系统地偏差信号;积分环节主要用于消除静差,提高系统的无差度;微分环节主要反映的是偏差信号的变化趋势,从而加快系统的动作速度,减少调节时间。
2.2 改进积分PID 算法
普通的PID 控制中,积分环节的引入是为了消除静差,提高控制精度[15]。但系统在启动、结束或者是大幅度调整设定时,系统输出的大的偏差会造成积分积累,从而引起系统较大的超调。因此引入了积分分离的优化方法,即被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度,可表示如下:

其中,a为积分项积分分离系数,如式(4)所示。

其中:e0为设定的阈值。
2.3 Bang-Bang 和PID 混合算法
为了加快温度调节的时间,引入了Bang-Bang控制方法[16],使得系统在两种状态下进行切换,使系统处于开关状态,即,在计算的温度偏差偏大的时候,执行Bang-Bang 控制;在温度偏差比较小的时候,执行PID 控制方法,有效地缩短了温度调节过渡时间,实现了最小时间的最优控制。Bang-Bang 控制表达式如式(5)所示。

式中:u(k)为控制器的输出量,umax为输出的最大值,e(k)为偏差,u0为设定的阈值。
2.4 不完全微分PID 控制算法
引入的微分调节在系统的温度有变化时产生作用,当变化的速度越快,输出信号越强,因此能够加快调节速度,减少超调,改善系统的动态性能。但是也带来了高频干扰,特别是误差扰动突变的时候会造成系统不稳定。本文使用了不完全微分的PID 控制方法,即在PID 算法上加了一阶惯性低通滤波器,进一步滤除了引入的高频干扰。
如图2 所示,Kp、Kp/TIs、Kp/TDs分别是PID 控制器的比例、积分、微分系数,则系统的传递函数:
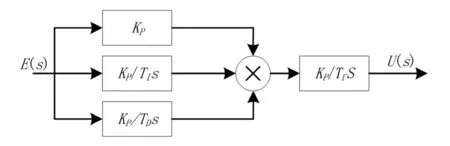
图2 引入的不完全微分PID 控制算法


采样时间设置为Ts,则可将式(7)离散化为

则有

则改进的PID 可表示如下:

3 实验结果分析
3.1 温控系统仿真分析
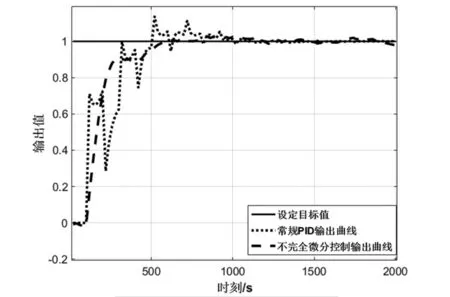
图3 引入的不完全微分PID 的系统仿真结果图
3.2 设计的温控系统分析
从常温40℃下开始对系统进行加热,设定的目标升温温度为95℃,使用引入的不完全微分的PID温控算法的一次升温时间-温度曲线图如图4(a)所示;从温度为95℃下开始对系统进行制冷,设定的目标降温温度为65℃,使用引入的不完全微分的PID 温控算法的一次降温时间-温度曲线图如图4(b)所示。
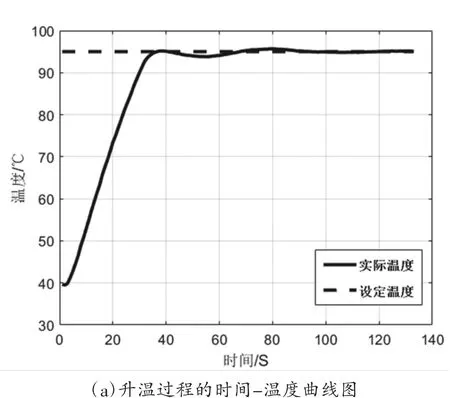

图4 引入的不完全微分PID 的时间-温度曲线图
由图4 可以看出,引入的不完全微分的PID 温控算法能够调节温度使得较快且稳定地达到设定的目标温度。
图5(a)分别显示了常规的位置式PID、改进的PID算法、Bang-Bang 和PID 混合算法以及不完全微分PID控制算法的升温时间-温度曲线图,图5(b)分别显示了各种方法的降温时间-温度曲线图;可以看出,引入的不完全微分PID 控制算法相对于其他的控制算法较为稳定和可靠地达到设定的目标温度,具有系统响应速度快,稳定性好等特点,说明了该温控算法提高了系统的温控性能。

图5 多种PID 控制方法的升降温时间-温度曲线图
图6 为引入的不完全微分的PID 温控算法多个升降温循环的温度调节曲线、功率调节曲线以及误差变化曲线图。可以看出,基于不完全微分的PID 算法使得控制器调节PWM 输出功率,使得系统温度能够较为快速和稳定地调节在指定地目标温度下。

图6 系统温度-功率-误差曲线图
本文采用了误差平方e2(t)的积分ISE指标[17]来评估算法的温控性能,其定义如下:8.375、8.108 和7.478;此外,本文的温控方法整体平均误差是12.019,比其他的PID 温控方法整体的平均误差15.47 要小,进一步说明了本文的温控方法相对其他的PID 温控方法能够更好地达到指定的目标温度,改善了温控系统的整体控制精度,在工程上有较为广泛的应用。

表1显示了各种PID 温控算法在升温过程、降温过程的误差及平均误差。可以看出,在升温过程中,本文的PID 温控算法的误差是16.694,而位置式PID、改进的积分PID、结合Bang-Bang 的PID 的误差则分别达19.175、19.897 和17.633;在降温过程中,本文的PID 温控算法的误差是7.344,而位置式PID、改进的积分PID、结合Bang-Bang 的PID 的误差则分别达
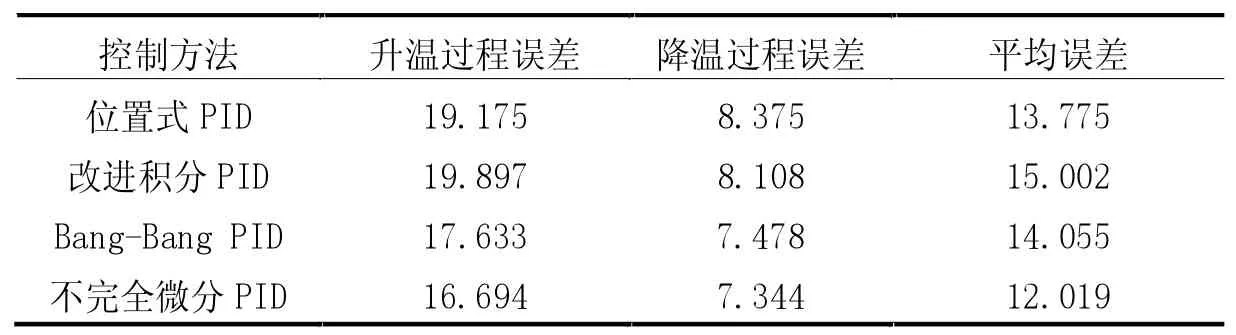
表1 多种PID 温度控制方法的误差对比
4 结束语
针对温控系统具有时变性、非线性及纯滞后性等特点,本文首先设计了以STM32 为控制核心,采用四线制的铂电阻Pt1000 和MAX31865 温度采集转换电路进行温度采集和转换,采用半导体制冷器和满足电压要求的H 桥逻辑控制驱动电路实现制冷片的制冷加热功能,使用PID 调节PWM 的占空比来控制半导体制冷器的制冷效率,完成一次闭环的温度调节控制。此外,针对PID 控制算法中引入的微分信号会引进高频干扰,因此在PID 算法上加了一阶惯性低通滤波器,引入了不完全微分PID 控制。实验结果表明引入不完全微分的PID 温控算法的温度控制效果要优于其他的PID 控制算法,如常规的位置式PID、改进积分PID、结合Bang-Bang 控制的PID 等;具有系统响应速度快、鲁棒性等特点,在工程温度控制方面具有一定的实用价值和应用价值。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
矿山安全信息(2021年21期)2021-07-04
矿山安全信息(2020年37期)2020-12-26
原子与分子物理学报(2020年5期)2020-03-17
矿山安全信息(2020年2期)2020-03-05
矿山安全信息(2020年3期)2020-03-04
制造技术与机床(2017年3期)2017-06-23
现代电子技术(2016年15期)2016-12-01
电子制作(2016年21期)2016-05-17
工业设计(2016年6期)2016-04-17