三维可视化海底电缆智能监控平台及其应用
2022-07-02 05:23:14史令彬沈清野徐海宁韦立富丁同臻丁明磊
浙江电力 2022年6期
韩 磊,史令彬,沈清野,徐海宁,敬 强,韦立富,李 想,丁同臻,丁明磊,张 霞
(国网浙江省电力有限公司舟山供电公司,浙江 舟山 316000)
0 引言
海底电缆是沿海岛屿与城市之间电力传输的重要手段,在实现电网国际化和区域电网互联进程中起着重要作用[1]。国网舟山供电公司管辖范围内具有较为复杂的海底输电线路,当前该公司海底电缆运维主要采用二维数据监测平台,实施雷达与AIS(船舶自动识别系统)信号融合进行目标物识别与判断,视频监控等回顾故障发生信息。该平台不能实时立体化呈现海底地形地貌、船舶抛锚等相关状态,同时也无法实现该区域是否符合渔船锚泊条件和多维度观察渔船锚泊后拖锚损害等结果[2-4]。为解决此问题,本文研究了扫海数据进行三维可视化还原,导入Unity3D 引擎中并集成监测硬件[5-8],实现可视化海底电缆监测中的三维海底地形地貌以及船锚缆关系的三维视觉呈现,为海底电缆运维中预警判断和事故回放追责提供全方位、多维度的保障[9],减少锚害对电缆故障造成的重大经济损失。
1 扫海数据解析
1.1 海底电缆数据获取
1.1.1 舟山马目至鱼山220 kV海缆路由
舟山至马目路由海缆敷设于2018 年3 月,共敷设7条海缆。海缆在运维监测过程中会产生多源勘测的原始数据,包括海缆路由环境、海缆裸露数据、埋深、海缆本体,甚至是水文气象数据等。通过对这些数据的综合衡量,才能更加直观地可视化显示海底电缆路由以及海缆的状态。在本次扫海数据还原中,如图1所示,海缆路由调查区域先进行设定。

图1 海缆路由调查区域示意图
该扫测采用侧扫声呐进行,侧扫声纳坐标位置误差为±2 m;GPS(全球定位系统)天线到拖鱼实际位置误差估算值为±2.0 m;拖鱼偏离航迹线的误差估算值为±2.0 m。由此,计算可得扫声纳拖鱼坐标位置精度为±3.46 m,侧扫声纳扫侧海缆坐标位置平面精度为±3.61 m。
1.1.2 三维可视化系统中地形处理
扫海数据在三维可视化引擎处理之前需要进行预处理[10-14]。通过外部的预数据处理生成模型文件,在软件中对外部模型进行动态加载。模型的生成和渲染都在引擎软件内进行,软件根据用户视角实时计算所需要的模型及精度,对地形进行三维渲染。主要经过以下步骤:
1)数据预处理
由于扫海数据为经纬度坐标,首先对经纬度数据进行十进制转换,再将高度数据与经纬度数据的单位进行统一化处理,形成XYZ坐标形式的数据文件。
2)数据分层
在软件实际应用中,不同的视角高度所需要的地形精度也不同。因此根据实际的地形大小,通过多细节层次的方式生成不同精度的地形数据,以匹配不同视角范围下的地形显示。
3)数据分块
地形数据量较大,如果所有的高精度模型都在软件中同时进行加载可能会导致帧数不稳定等性能问题。因此,可将地形数据进行分块处理,通过根据显示范围动态加载所需要的地形块来提高软件运行效率。
4)模型生成
根据分层分块处理完成的扫海数据生成地形网格,再将网格转换为曲面,并将地形曲面进行导出,作为软件中地形数据的外部文件。
1.2 海缆线数据解析
侧扫声呐系统中的拖鱼布放采用侧弦拖曳式布放。布放在测量船左弦[15],距离船舷2 m左右,拖体入水深度约3 m,信标机天线头安装在侧弦距离拖鱼2 m 处。系统甲板单元置于驾驶舱,方便保持导航与侧扫数据实时采集的一致性。经过扫海公司将部分海缆路由数据处理后,可见数据类型如表1所示。在三维可视化引擎软件中,数据点较大,不容易发现典型锚泊区域。但是该数据有效性为接下来二次实验数据提供了样本参考。
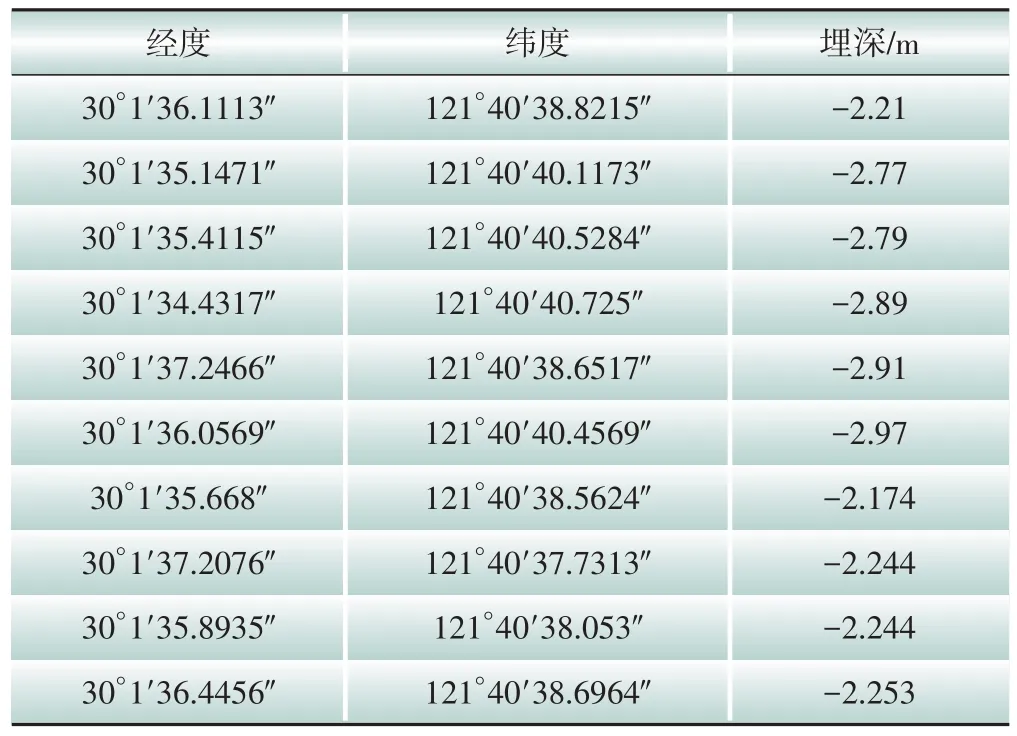
表1 二次扫海测试数据
二次采集样本数据时设置好GPS 偏移量、发射功率、增益等参数,保证现场测量时整个系统处于安全、可靠的状态。测量前对拖鱼的吃水和位置进行量测,通过软件对系统设定,将拖鱼位置归算至GPS 位置处。根据技术要求,将设备安装调试后,沿测线进行数据采集,采集数据如表2所示。

表2 二次样本数据
2 扫海数据三维可视化还原
2.1 线性插值三角网法还原扫测数据样本
将扫海数据点连成海域实时显示是三维可视化的核心,其原理是设置点的一个集合[16-17],相当于将任意取相临近Zi=INTERPTRI(TRI,X,Y,Z,Xi,Yi)对向量Y和Z的散点数据进行线性插值,如由DELAUNAY 在Xi和Yi中的各个点对处返回的三角剖分TRI 所述。也就是说,Zi(k)是点(Xi(k),Yi(k))处的线性插值。当Xi是行向量而Yi是列向量时,Xi和Yi不会像在GRIDDATA 中那样被网状网格化。实际上,一个常见的三角形绘制算法是查看三角形周围包围框中的每个像素,然后对每个像素计算重心坐标。如果其中一个权重是负数,那么该像素将被跳过。这种算法的一个优点是,显卡可以简单地并行化边界框中的每个像素,这使得绘制三角形非常快。
2.2 三维地形还原过程
如图2 所示:取扫测数据临近的3 个点V1、V2、V3,作为其中一个三角形的3 个顶点,P 作为重心点计算距离D:
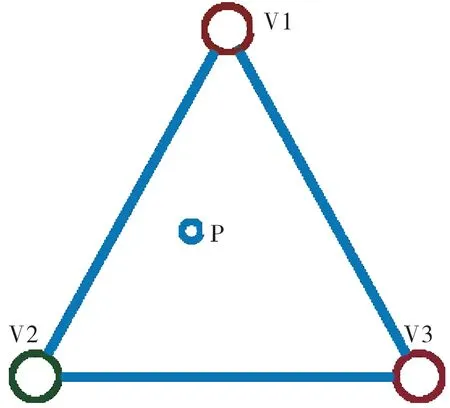
图2 任意临近3个点的坐标示意图
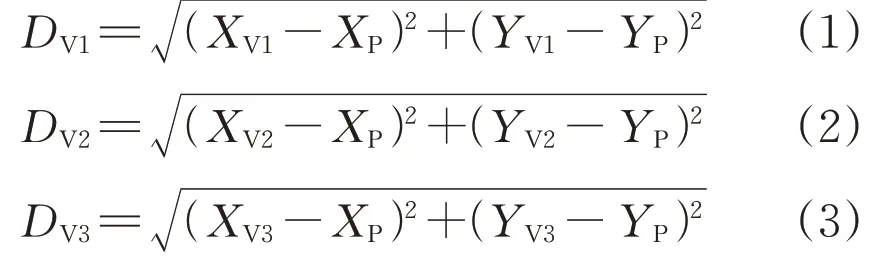
式中:DV1、DV2、DV3分别为V1、V2、V3 到P 点的距离;XV1、XV2、XV3、XP分别为V1、V2、V3、P 点的横坐标值;YV1、YV2、YV3、YP分别为V1、V2、V3、P点的纵坐标值。
再根据每个顶点的样本坐标定义权重W:
最后,通过三角形每个顶点到混合点的距离可以将所有的点连接成面,并且添加相关的颜色,填色后效果如图3所示。
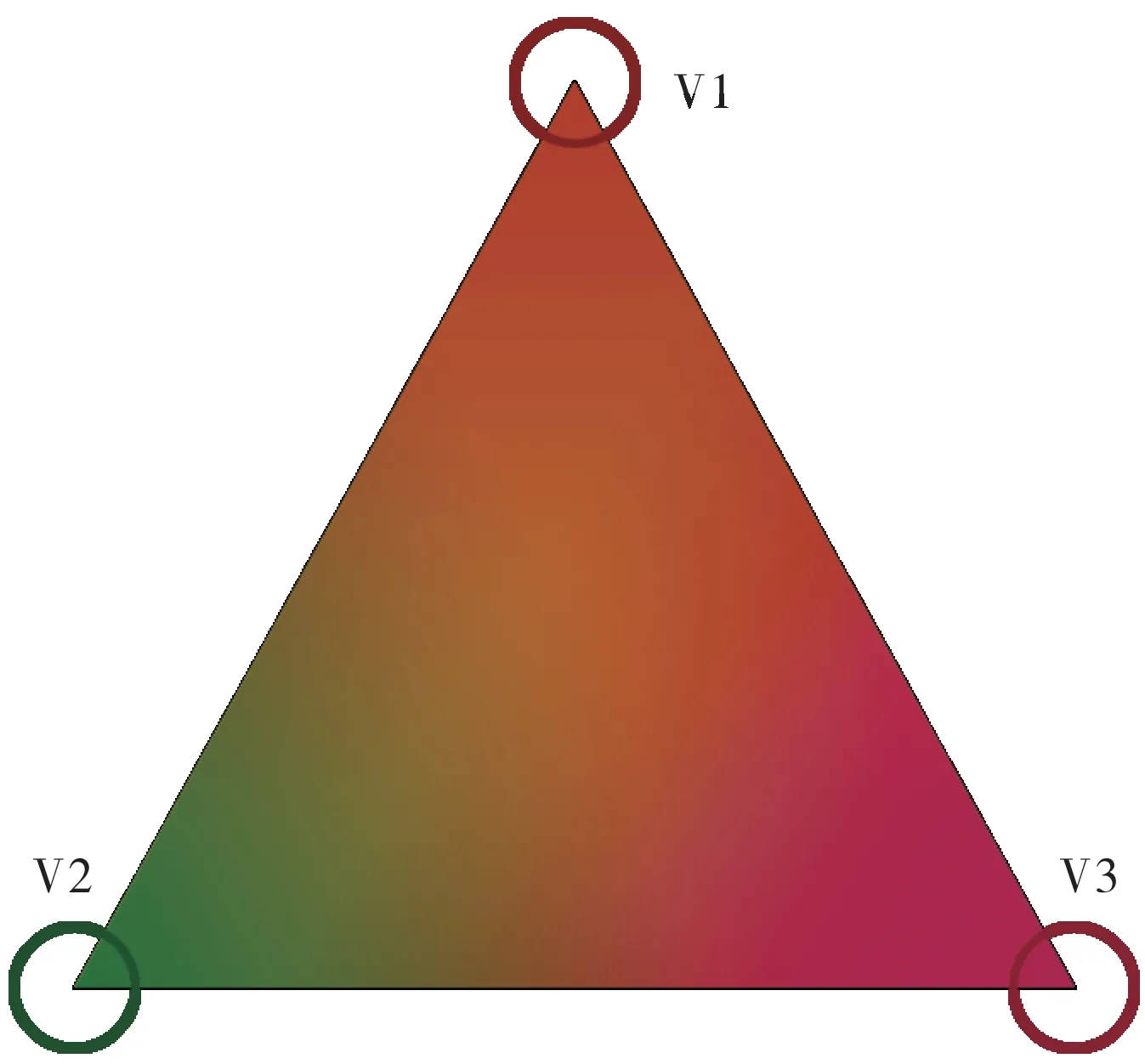
图3 三点成面的颜色填充
经过所有点的云数据处理后,采用线性插值三角网插值算法程序将样本数据还原,效果如图4所示。
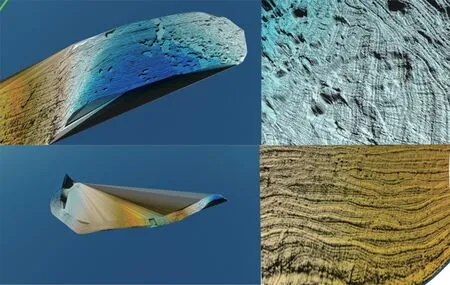
图4 多个点连成的海底地形区域
3 基于真实扫海数据的三维可视化智能监测系统
3.1 总体架构
3.1.1 平台介绍
根据国网浙江省电力有限公司的业务需求,基于三维扫海数据还原,设计集搜索、监视、跟踪、报警于一体的三维可视的海底电缆运维检修智能化综合管控平台。通过该平台可以实现海底电缆健康管理、状态监测、水面目标态状监测、外力破坏预警、事件急速智能处置、信息要素可视化的现代化管理。
3.1.2 平台功能流程
该三维可视的海底电缆运维检修智能化综合管理平台包含7个功能点,其功能流程如图5所示。
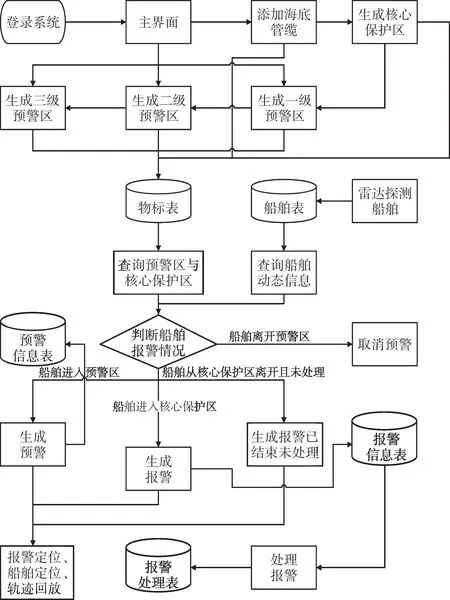
图5 平台功能流程
1)系统登陆。
2)实时探测:工具(测量功能、点定位功能),图层管理(点线面),显示设置(目标设置、场景设置、报警设置、光电设置),实时数据(实时船舶、已消失的船舶、实时报警列表、报警处理、实时预警列表、已结束报警列表、历史报警列表、风险热点图),海图显示(海缆显示、海缆编辑功能、目标报警状态显示、点目标显示、目标数据源不同显示)。
3)历史回放。
4)CCTV(闭路电视):相机列表树状图、云台控制功能。
5)信息管理:船舶管理、海缆管理、锚泊事件管理。
6)平台管理:用户管理、运维管理。
7)报警服务:输入报警规则修改、输出报警数据信息。
在海缆监控方面,充分利用“大、云、物、移、智”安防领域新技术,将电子海图、AR(增强现实技术)增强联动视频、船只AIS和雷达信号融合认证等结合起来。通过国内领先的海缆综合监控预警平台,做到海缆监控信息分级预警及大数据综合研判,极大地提升了海缆防外破水平。
3.2 系统数据传递
系统可根据实际探测需要,以网络接入的方式有选择地连入包括水体、水面目标等不同种类和数量的分布式探测传感器,对目标特征进行采集。各类分布式前端探测站/点均在无人值守下工作。前端各类探测数据通过网络汇总至探测中心站后,由部署在中心的综合数据处理系统(软件)进行探测数据的融合与大数据分析。最后,依照各探测监管部门的行业习惯和管理意图,将各类探测及预警信息以图形、表格或文本等多种形式呈现给管理者,这些信息包括:海图背景下的目标跟踪态势图、触发各类报警的目标信息、特殊目标的航行路线规划及调度指示、监视视频画面以及探测分析图表、预警辅助决策建议信息等。此外,借助中心的管理平台软件,用户还可远程操控和管理整个系统中的所有设备,并可借助AIS、VHF(甚高频)实现对管理对象(船舶)的航行路线规划、调度管理及双向实时信息交互。平台按照数据信息流的传递顺序依次划分为4个功能层次,分别是:感知层、传输层、支撑层及应用层,如图6所示。
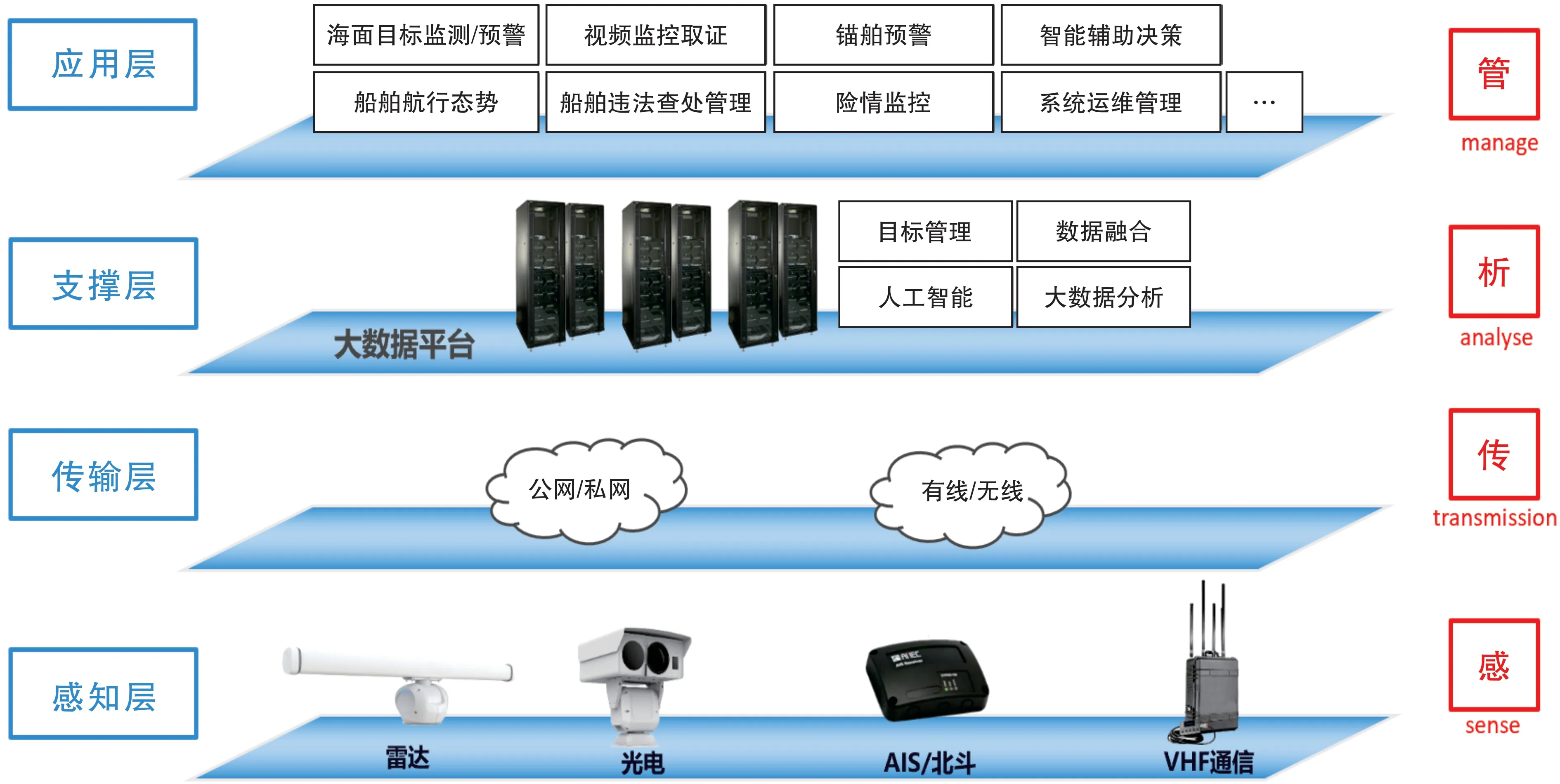
图6 数据传递层示意图
来自各种类分布式探测传感器的探测数据通过各种数据传送形式汇聚到中心站,由该综合数据处理软件进行数据融合、大数据分析,并最终将探测区域内各类识别到的目标运动状态叠加在海图背景上,以态势图的形式呈现给用户。
同时,为了丰富用户的监管手段,系统还可为操作者提供对水面目标的手动或自动CCTV 视频抓拍取证操作控制、各类探测数据的存储及回放、系统设备的远程操控及维护管理等多种子功能项。此外,该平台还支持以扩展功能插件的形式不断扩充新的功能项。
3.3 三维可视化子系统构建
3.3.1 三维可视化子系统功能结构
该三维可视化的海底电缆运维检修智能综合管控平台按照功能模块可分为以下几个子系统:海缆海底地貌的三维可视化子系统、海缆线路由的三维可视子系统、水文气象子系统、AIS 电子围栏子系统、先进雷达探测子系统、海底电缆全生命周期管理子系统。其结构如图7所示。
1)海缆海底地貌的三维可视化子系统:利用声呐探测技术,对试点海域的海缆所辖区域完成声呐扫测,回波数据通过4G/5G 专用网络或离线的方式上传至海底电缆运维检修智能综合管控平台。开发对回波数据三维成像的算法,实现扫测数据的三维成像及完成与历史数据的比对工作。对产生变化的部分,在平台上给出提示。
2)海缆线路由的三维可视子系统:利用高精度磁探技术(原子磁力仪),对试点海域的海缆完成磁探扫测,扫测数据通过4G/5G 专用网络或离线的方式传输至海底电缆运维检修智能综合管控平台。开发对磁探数据三维成像的算法,实现海缆路由三维成像及完成历史路由的比对工作。对产生变化的部分,在平台上给出提示。
3)水文气象子系统:在三维可视化的海底电缆运维检修智能综合管控平台接入水文气象信息的接口,并在平台上融合展示的水文气象信息,在海缆所在海域实时展现水文气象数据,并为海缆运行、海面船舶管理、运维检修工作安排等提供气象环境影响的数据依据,为生产安全提供水文气象信息支持。
4)基于AIS 的电子围栏子系统:在充分利用现有资源的基础上,整合现有信息、组织、资源,加强综合管理能力,实现海缆监控海域的船舶动态监控平台的智能化和自动化,完善船舶动态管理机制。为了保障运检和其他部门在紧急事件的处理过程中快速、准确、及时地收集各类信息,通过多种方式进行高效沟通,获得科学的辅助决策信息,利用信息技术和决策支持技术,建立具有先进性海缆保护区域的电子围栏。
系统整体采用通用的C/S 构架、前后端分离的开发技术,完成业务数据的前端展示与人机交互功能。系统提供PC端应用界面及大屏可视化展现,完成原舟山海缆一体化监控平台的所有功能,并实现后续子模块接入的接口开发工作。通过多源设备感知,融合雷达、AIS、气象、磁探、声呐、光电形成目标的多源头探测及3D展示,集雷达数据、AIS 数据、光电数据进行船只目标的综合管理与预告警,建立全生命周期管理,提供磁探、声呐、气象、AIS电子围栏数据接口。
3.3.2 三维可视化子系统实现流程
通过对三维可视化模型的数据环境与数据格式进行全面分析,实现了对不同格式的规则格网DEM(数字高程模型)数据进行转换,最终得到三维可视化所需要的数据,从而形成一维完整的DEM数据转换、处理、检验机制。对三维可视化效果进行了扩展,除三角形网和纹理效果图外,增加了光影效果和分层着色三维图效果。详细讨论了实现光影效果的不同算法的效率,并找到了一种高效的地平面计算方法。反投影变换实现过程,简要叠加了常见的三维分析方法以及地图代数在三维分析中的作用。对三维可视化模型提出了更为合理的单层多比例尺表达的实现模式,讨论了其实现方法以及数据组织形式;根据对模型的认识,从整体上提出一个全面的、开放式的应用程序构架蓝图,为后续的软件开发提供支持。实现了三维可视化应用程序的功能开发。
本系统基于二维的舟山电力海缆监控一体化平台,采用Unity3D 的三维引擎技术以及C#编程语言、WPF界面框架升级构建了三维可视的海底电缆运维检修智能化综合管控平台。通过对Unity3D 场景坐标的综合转换,设计基于Unity3D场景坐标转换算法,实现地理坐标转Unity3D 场景坐标,解决了二、三维数据坐标易偏移的问题。二、三维系统切换界面如图8所示。

图8 三维可视化主场景界面示意图
3.3.3 三维可视化关键技术应用
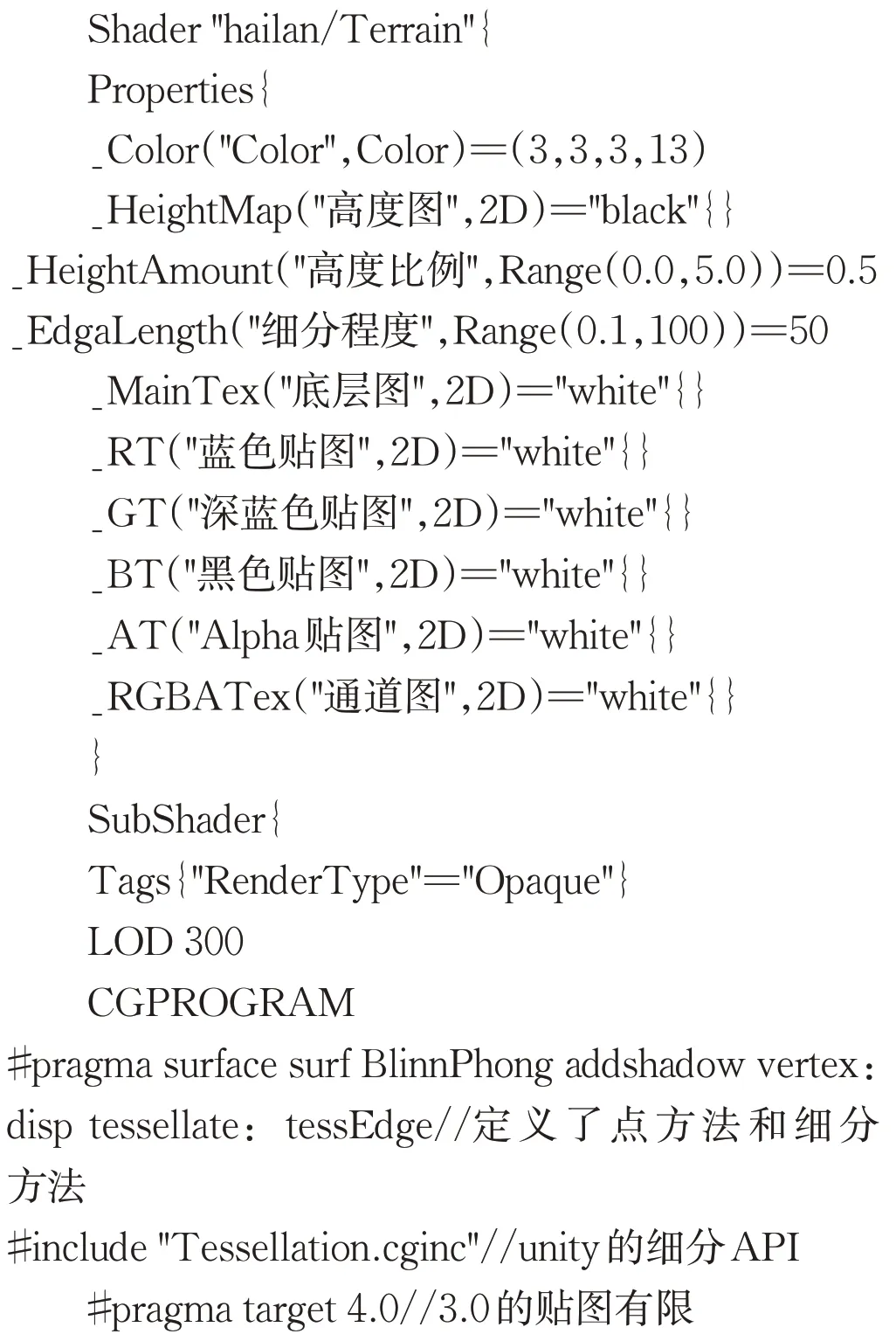
Unity3D 也称Unity,是由Unity Technologies公司开发的一个让用户轻松创建诸如三维视频、建筑可视化、实时三维动画等类型互动内容的多平台综合型引擎工具。Unity3D 可以运行在Win⁃dows 和MacOS X 下,可发布至Windows、Mac、Wii、iPhone、WebGL(需要HTML5)、Windows Phone 8 和Android 平台。也可以利用Unity Web Player插件发布网页版内容,支持Mac和Windows平台的网页浏览,是一个全面整合的专业实时渲染引擎。在本项目中应用其三维场景进行海面和海底关系表现,如以下代码以及效果图(图9)所示。
图9 三维可视化平台海缆与海面
3.3.4 三维可视化系统中数据存储
建立新的MySQL Command 变量,通过以太网与MySQL数据库连接,通过ExecuteReader()函数读取MULTBEANSONARTARGETDATA 表内的声呐探测到的目标物的类型(type),ID(id),三维UTM坐标(UTM_X,UTM_Y,UTM_X)以及入侵时间(time1),通过ExecuteReader()函数来读取数据库中AISTRAJDATA 表内的AIS 信息,mmsi(mmsi)row(row),时间(time),ID(id),三维UTM 坐标(UTM3_X,UTM3_Y,UTM3_Z),类型(type)。最后将读取到的数据存入软件内的相应变量中。
建立新的SqlConnection 变量,通过以太网与Sql数据库建立连接。将读取到的实时监控数据写入到Sql的MULTBEANSONARTARGETDATA表与AISTRAJDATA表内。筛选最近新的目标物信息。将最近目标物信息三维坐标转换格式。将AIS 报文信息转换格式。最后将数据信息发送至三维视景软件。
4 结语
三维可视的海底电缆运维检修智能化综合管控平台是一套对海底电缆全生命周期运检管控的自动化、智能化、现代化的管理系统。该平台为原平台的升级版本,在原有平台系统架构不变的情况下,集成已有全部系统和技术、引入前沿监测预警技术、提高雷达与AIS融合辅助判断能力、集成数据分析与智能辅判,将当前系统升级成三维可视化的海底电缆运维检修智能综合管控平台。主要突出地貌、海缆三维可视化、相关数据可视化分析、水文气象信息可视化和基于雷达与AIS融合探测海面目标监视辅助预警成像等技术,在技术、经济、操作、法律方面都是可行的,可以进行平台开发。
本文将扫海数据通过数据转换,最终在引擎中展示效果,能够为海缆的三维可视化监控中数据还原提供一定的参考。本文中是基于线性插值三角网法进行计算、程序批量运算、引擎中引用等步骤进行基本的处理,在采样数据过程中分批次进行,弥补数据量粗糙带来的不直观准确性。在接下来的研究中,将注重海量数据实时还原的问题,针对局部海缆进行三维可视化辅助预判,但是目前还不具备甄别淤泥、礁石、浅滩等地形的能力。
猜你喜欢
船电技术(2024年2期)2024-03-15 12:17:04
电气技术与经济(2023年9期)2023-12-06 14:23:30
舰船科学技术(2022年21期)2022-12-12 08:06:44
铁道通信信号(2020年3期)2020-09-21 09:13:00
中国新技术新产品(2020年24期)2020-02-23 09:12:28
中国交通信息化(2019年5期)2019-08-30 03:49:14
铁道通信信号(2018年8期)2018-11-10 05:15:44
能源(2018年8期)2018-09-21 07:57:24
电线电缆(2018年1期)2018-03-16 02:19:10
能源(2017年11期)2017-12-13 08:12:25