
基于辅助站立分析的老年人坐便器设计
2022-07-01 01:43郭家伟陈华赵帆张琳徐子豪
邵阳学院学报(自然科学版) 2022年3期
郭家伟,陈华,赵帆,张琳,徐子豪
(马鞍山学院 大阪医工学院,安徽 马鞍山,243100)
characteristic
厕所系统(现代卫生设备)的完善是医学界的里程碑[1]。据世界厕所组织统计,单人每年约有304 h用于如厕,且女性用时更长[2],同时,厕所又是危险地带,意外和紧急情况常有报道。厕所是医疗救护人员经常出入的救援地点。
65岁以上的老年人坐下和离开马桶时的动作很危险,特别是心脑血管病患者。首先,蹲厕时间如果过久则难以站立,此外,由于体位突然改变,血压也会下降,容易诱发短暂性脑缺血,导致两眼发黑、头晕,甚至晕厥、中风。因此,开发辅助装置扶助老年人如厕起身变得尤为重要。
董辉等[3]设计了一种智能升降马桶,该装置由平行四边形机构组成,可以在29.25 s内完成辅助站立动作,该装置结构简单、运行可靠,但控制复杂,成本相对较高。陈海伦等[4]针对老年人如厕时弯腰掀盖、坐起及按压冲水等问题,开发了一种智能电动升降马桶,该马桶尺寸可调、安装方便,但结构复杂,推广不易。吴瑞聪等[5]针对老年人不易起蹲、不便行走、如厕不适等问题,提出了一种辅助如厕椅,满足了老年人对如厕过程的需求。KUME等[6]研制了一款床椅辅助机器人,顺利实现了从床到轮椅及方便如厕等功能。桑凌峰等[7]研发了一款智能轮椅担架车,通过所设计的折展机构变换实现辅助如厕,座椅升高、如厕等功能,该装置稳定可靠,主要运用于医疗领域。本文针对老年人如厕过程中存在起身站立问题,提出了一种辅助如厕装置,通过弓形机构舒展来实现预定的功能要求,辅助老年人完成起身动作。
1 老年人排便蹲坐模型建立
老年人在排便蹲坐及起身过程中面临小腿抽筋、腰部酸疼及眩晕等问题,这些问题的产生均与人因尺寸有关。为分析与排便姿势相关的人因尺寸,建立了如图1所示的老年人蹲坐模型。图1中θ为肛肠角,α为膝关节转角,T为坐深,H为坐高,S为坐姿肩高。
查阅文献[8-10]分析后发现:老年人在蹲坐状态下,肛肠角θ=80°,膝关节角为90°时排便姿势最为舒适;在起身状态下,膝关节角由90°转动至150°(α=60°)时老年人完成起身动作。根据人因工程学相关设计原则[10-13],列出了如表1所示的与老年人排便姿势相关的人因尺寸。
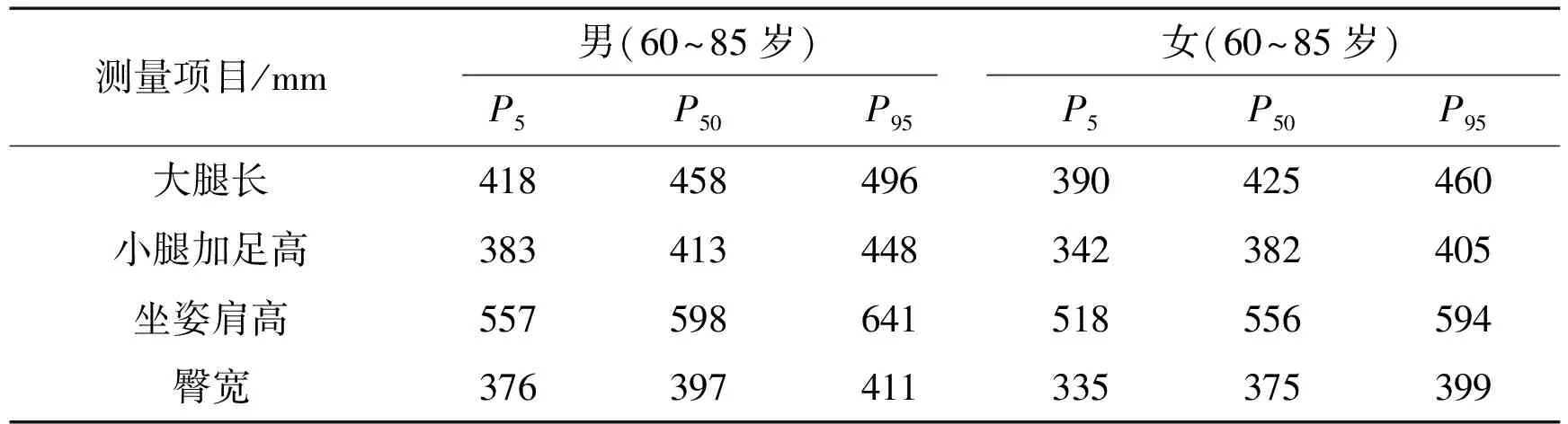
表1 老年人排便姿势人因尺寸Table 1 Defecation posture with human factor size of the elderly mm
为设计出符合老年人人因尺寸的辅助坐便器,依据人因工程学推荐的男性小腿加足高取第95百分位值,女性取第5百分位值,并考虑座椅类设计的安全稳定性,将辅助坐便器坐高H取420 mm,坐深T取440 mm,坐姿肩高S取560 mm。
2 辅助坐便器整体结构设计
将与老年人排便姿势相关的人因尺寸作为坐便器辅助功能实现的期望值,完成该辅助装置整体结构设计。
2.1 辅助坐便器功能尺寸设计
图2所示为辅助坐便器功能尺寸图,图2中坐深T=440 mm,坐高H=420 mm,膝关节转角α=60°,弓形机构ABCD的杆长均相等,即LAB=LBD=LCD=LAC。

图1 老年人蹲坐模型Fig.1 Model of elderly squatting

图2 辅助坐便器功能尺寸图Fig.2 Functional dimension drawing of auxiliary toilet
由各构件间的相对运动关系可列出等式:
{T=LOA+LAC+LCD=LOA+2LT=LOC+LCE
(1)
式中:L为弓形机构各连杆长度;LOA为铰点O和铰点A之间距离;LCE为滑块C质心与铰点E之间距离。
在△OAC中,运用余弦定理可列出等式:
LAC2=LOA2+LOC2-2LOA×LOC×cosα
(2)
式中:LOC为铰点O与滑块C质心之间距离。
联立式(1)和式(2)可得:
L2=(440-2LOC)2+LOC2-(440-2LOC)×LOC
(3)
由△OAC与△OBE相似可列出等式:
LDE/LAC=LCD/LOA=LCE/LOC
(4)
式中:LDE为连杆DE的长度。
联立式(1)和式(4)可得:
LOC×(440-2L)+LOC×L= 440×(440-2L)
(5)
联立式(3)和式(5)求解可得:L=162 mm,LOC=184 mm。
由式(1)和式(4)计算可得:LCE=216 mm,LOA=138 mm,LDE=190 mm。
由滑块C质心的始末位置可求出其行程S1:
S1=LOA+LAC-LOC=94 mm
(6)
由滑动轴质心的始末位置可求出其行程S2:
S2=LDE=L2/LOA=226 mm
(7)
2.2 辅助坐便器运动仿真
在不影响计算精度的情况下,对辅助坐便器结构进行了简化,并采用ADAMS动力学仿真软件,建立了如图3所示的运动仿真模型。
首先,根据装配关系添加各构件间运动副,编辑各构件材料及质量属性。
然后,将模拟人体重设置为750 N,并以膝关节转动中心为坐标原点建立如图3所示的笛卡尔直角坐标系。
最后,添加驱动,进行运动特性仿真实验,测量模拟人起身过程中,滑块质心、滑动轴质心位移及模拟人质心平移加速度。
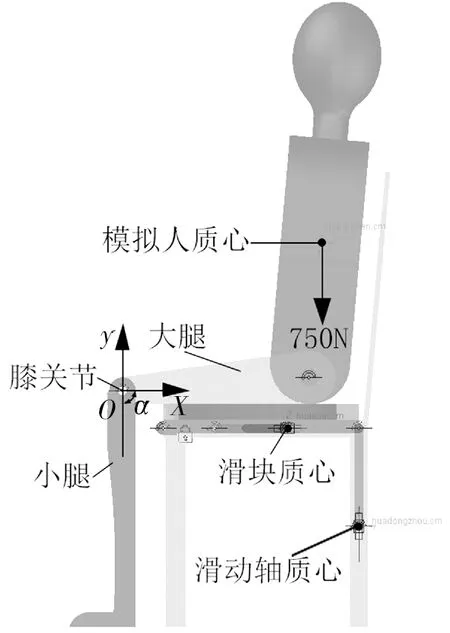
图3 辅助坐便器运动仿真模型Fig.3 Dynamic simulation model of auxiliary toilet
2.3 辅助坐便器运动仿真结果分析
图4所示为模拟人起身时,滑动轴质心位置X方向及Y方向位移变化曲线。由曲线变化分析可知,当膝关节转角为90°时,滑动轴质心初始坐标为(-531 mm,-305 mm),随着膝关节转角逐渐增大,滑动轴质心横坐标保持不变,纵坐标沿着Y向位移曲线逐渐增大,当膝关节角增大至150°时,滑动轴质心坐标为(-531 mm,-79 mm),由此可计算出膝关节转动60°,滑动轴质心垂直方向位移为226 mm,仿真结果与理论计算完全一致,表明坐便器辅助功能符合设计目标。
图5所示为模拟人起身时,滑块质心X方向及Y方向位移变化曲线。由曲线分析可知,当膝关节角90°时,滑块质心初始坐标为(-273.0 mm,-28.4 mm),随着膝关节转角逐渐增大,滑块质心纵坐标保持不变,横坐标沿着X向位移曲线逐渐增大,当膝关节角增大至150°时,滑块质心坐标值为(-179.0 mm,-28.4 mm),由此可计算出膝关节转动60°,滑块质心水平方向位移为94.0 mm,仿真结果与理论计算完全一致,表明坐便器运动特性符合设计要求。

图4 滑动轴质心位移曲线Fig.4 Displacement curve of sliding shaft center of mass

图5 滑块质心位移曲线Fig.5 Displacement curve of slider center of mass
图6所示为模拟人起身时,模拟人质心X方向及Y方向加速度变化曲线。由曲线分析可知,膝关节由90°转动至150°的过程中,模拟人质心水平方向加速度在-5.2~1.3 mm/s2内变动,水平方向加速度幅值变化较小,几乎不产生冲击。模拟人质心垂直方向加速度在86.7~99.7 mm/s2内变动,垂直方向加速度幅值在有限值范围内变化,存在一定的柔性冲击。
3 辅助坐便器三维模型设计
3.1 辅助坐便器三维模型建立
如图7所示,根据辅助坐便器运动仿真结果,运用SoildWorks三维建模软件构建了辅助坐便器三维模型,其结构主要由马桶盖、马桶座、靠背、弓形机构、滑块、滑动轴、推杆及电机组成。靠背与马桶座制成一体,马桶盖与马桶座通过铰链连接。马桶座上横向开有滑槽、纵向开有导轨槽。连杆1、连杆2、连杆3长度相同,各连杆间通过铰链连接,并与马桶盖共同组成弓形机构。连杆2和连杆3同端铰接在滑块上,滑块可在滑槽内水平方向滑动。连杆4一端铰接在连杆1上,另一端铰接在滑动轴上,滑动轴可在导轨槽内垂直方向移动。滑动轴固定安装在推杆一端,推杆由电机推动。
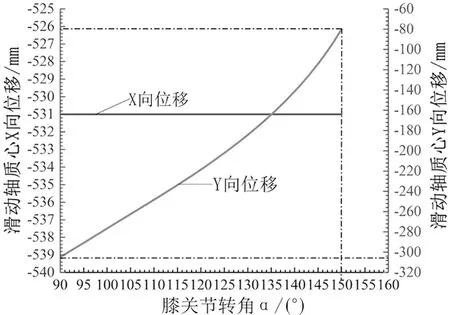
图6 模拟人质心加速度曲线Fig.6 Acceleration curve of simMan centroid
3.2 辅助坐便器工作原理
辅助坐便器工作原理见图7。当老年人如厕结束时,启动电机,推杆推动滑动轴沿着导轨槽垂直向上移动,滑动轴将运动传递至连杆4,连杆4迫使弓形机构舒展,以此来驱动马桶盖绕铰点逆时针转动,转动至连杆4与连杆3共线,运动停止,完成起身动作。

图7 辅助坐便器三维模型Fig.7 Three dimensional model of auxiliary toilet
4 结论
1)所设计的基于弓形机构的坐便器可以实现辅助起身功能,其运动特性符合老年人排便人因尺寸要求,该装置在医疗辅助领域具有一定的实用价值。
2)辅助模拟人起身过程中,垂直方向加速度最大值为99.7 mm/s2,虽然存在一定的柔性冲击,但在可允许的范围内。
3)在结构优化及材料等方面深入研究,可进一步减小辅助坐便器在运动过程对老年人造成的冲击,提升使用的舒适性。
猜你喜欢
反歧视评论(2022年0期)2022-10-21
汽车实用技术(2022年14期)2022-07-30
中学生学习报(2022年26期)2022-05-23
北京航空航天大学学报(2021年4期)2021-11-24
甘肃教育(2020年6期)2020-09-11
领导文萃(2019年18期)2019-09-25
民用飞机设计与研究(2019年4期)2019-05-21
环球时报(2018-11-07)2018-11-07
应用科技(2015年5期)2015-12-09
航天器工程(2014年5期)2014-03-11
