
基于单目视觉的足球进门位置自动判别算法*
2022-06-28 01:22高长旭孙巧妍陈祥光
传感器与微系统 2022年6期
高长旭, 孙巧妍, 陈祥光
(1.烟台南山学院 人文学院,山东 烟台 265713; 2.烟台南山学院 工学院,山东 烟台 265713;3.北京理工大学 化学与化工学院,北京 100081)
0 引 言
当前,我国体育产业发展和体育科技的运用滞后于竞技体育的发展,先进的训练方法、体育设施和设备的应用还较少,尤其是应用于大众体育运动的先进体育设施和设备更有待于开发。在大学的足球训练和教学中,定点射门是主要的教学和考核内容。根据实战时足球的不同入射区域对守门员的扑救难度,将球门分成5个不同的得分区域,仅仅通过肉眼准确判断球进门瞬间球所在的球门区域很难,而目前尚无此方面的产品或者设计供使用,因此,需要设计出一种检测系统能够分辨出球员在无守门员守门的前提下射门时足球入门时的具体区域。运用图像处理的手段识别复杂背景下运动物体的形态特征和具体位置,是目前很多国内外学者关心和研究的热点问题。以往的研究表明很多学者在数字图像目标边缘检测与分割、图像倾斜度校正、图像形态学识别与定位方面做了深入研究,对本系统的设计与处理具有借鉴意义[1~8]。
1 足球进门位置自动判断算法原理
球门区域划分如图1所示。设定从A至E区域分别赋分60~100分。对于运动物体轨迹的判断,一般需要在不同位置安装3台以上的摄像机,通过计算机实现空间位置及运动轨迹预测的算法,计算并预测物体运动的轨迹[9]。由于足球场地大且空旷,摄像头若要像在室内安装那样放置位置十分精准,则安装难度和成本都很高。况且足球运动是室外运动,复杂的周边环境和多变的天气条件都会影响轨迹的准确判断。因此,应当寻求一种不定点安放摄像头即可以相对准确地判断足球进门位置的方法。摄像头使用时则带到场地,不使用时可以收回到室内存放。
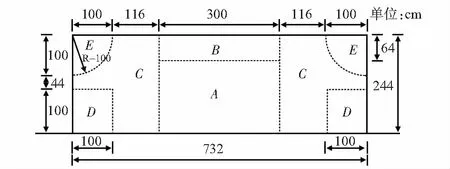
图1 足球场球门入门区域划分
根据FIFA国际11人制足球场标准规格[10],球门:长7.32 m、高2.44 m;两根球门柱以及横梁的宽度和厚度都应当保持一致,截面最长部分不得超过12 cm。球门线与球门柱还有横梁的宽度应当一致。足球尺寸周长68.5~69.5 cm,即直径约21.5 cm。如果能铺捉到足球进门瞬间的图像,那么图像中球门和足球面积的像素应对应成比例。只要判断出图像中球门位置和足球的位置,就可以方便地判断出足球射门位置。考虑到普通高校教学中对判断精度的要求并不高,球心位置坐标判断误差实际在3.5 cm以内是可以接受的。实际训练及测试过程中,球员一般都是在点球点附近进行射门训练,因此,可以使用单摄像头安放在如图2所示区域。

图2 单摄像头可安放区域示意
摄像头安装好后,可以录制球员射门的简短视频,通过一定算法可以捕捉到足球入门瞬间的一帧或几帧图像。这里只对捕捉到图像后如何进行足球与球门的相对位置判断的算法进行论述。
该算法的思路为:首先,将球门区域剪裁出来;然后,对剪裁出的图像进行倾斜度校正;第三步,根据形态特征将足球从复杂背景中识别出来并判定球心坐标;最后,根据球心坐标判断足球射门位置区域,判断出成绩,并向用户显示判断结果。
2 足球进门位置自动判断算法与仿真
2.1 球门位置判断算法与仿真
实验采用的实际图片采集于2018年9月4日,使用的是小米MAX3手机拍摄,场地为烟台南山学院东海校区体育场南足球门,摄像头像素为1 200万。拍摄位置在摄像头允许区域内随机,图像大小为720×960×3。该足球门没有按照国际FIFA规定油漆为白色,但颜色的差别不影响算法的应用。使用的处理软件可以是MATLAB 7.0及以上版本。本次仿真使用的电脑配置为因特尔E7500处理器,主频为2.94 GHz,32位操作系统,使用内存为3 GB,处理软件为MATLAB 7.0。采集到的图片背景区域较为复杂。绿色的草地和树林、红色的塑胶跑道、蓝色的天空及白色的建筑等颜色混杂,边界线不明显,且有阳光照射的阴影影响。该图片由于拍摄者手持手机不平的问题,明显有个倾斜的角度。为了检测出球门区域在图片的准确位置,并校正倾斜度,采取的算法流程如下。
首先对采集到的RGB图像进行蓝色像素点的判断[11]。具体方法是:
测试原RGB图像的大小,新建一个纵横尺寸相同的二维标志图像。然后分别取出像素的RGB数值,进行如下计算
近年来,儿童及青少年甲状腺癌的发病率逐渐增加,已成为较为常见的恶性肿瘤之一。其评估、治疗和随访具有重要意义。超声是其评估及随访的首选检查方法,与成人相比,儿童及青少年甲状腺癌更具侵犯性,更易发生术后局部复发和颈部及远处转移,超声表现及FNA适应证也有所不同。根据其超声及临床表现,选择合理手术方式及治疗方法,可提高治疗后长期生存率,改善预后。另外,分子学检查可能具有很好的补充诊断前景,但仍需进一步研究支持。
Rij=image(i,j,1)/(image(i,j,3)
Gij=image(i,j,2)/image(i,j,3)
Bij=image(i,j,3)
其中,Rij为像素的R维数据值;Gij为像素的G维数据值;Bij为像素的B维数据值;image(i,j,*)为图像的R、G、B三层数据中某一层坐标为(i,j)处的像素值。如果Rij<0.4&Gij<7&Bij>120,这判断该位置为蓝色像素点,对应像素位置标记为1,其余的位置标记为0。
经过颜色判别后的二值图像含有很多大小不一且形态各异的小面积干扰图,球门横梁和立柱形状也不规则,甚至可能存在部分位置断续。球门后支撑框的图像也清晰可见。为了获取球门平面区域的边界位置,应去掉干扰像素,并根据横梁和立柱的位置判断球门的平面图。针对图像做以下几步的算法处理:1)使用自适应中值滤波算法去除小概率噪声,但要保护球门图像细节。经验证,处理半径为3时效果最佳。2)使用膨胀与腐蚀操作相结合,修善横梁与立柱的断点图像。经验证,使用3×3的方形结构元时处理效果最佳。3)将上一步处理完毕的图像去掉面积小于20的小区域干扰,这样可以去除背景中树木绿叶及阴影的部分影响。4)根据图像的连通情况和横梁与立柱的位置关系,进一步去掉小面积干扰图。
经过上述几步处理后,图像中的干扰和杂质基本去除,球门位置区域已经较为清晰。
常用的倾斜度角度查找方法有两种[12]:一种是利用Hough变换找出倾斜角,另一种是利用角点检测找出倾斜角度。为了检测球门横梁所在直线的水平倾角,此处采用的是利用球门横梁线段所在直线检测水平倾斜角度。
图像倾斜角度矫正后,需要将球门横梁和立柱位置的边缘清晰化[13]。由于横梁和立柱图像上仍有干扰和杂质难以去除,取200像素点为阈值,分别检测图片中横梁位置的像素行数和立柱位置的像素列数。根据图片从上至下第一个符合阈值数量的行作为横梁的最上端,图片从左至右及从右至左第一个符合阈值的列数作为左右门柱的边界。根据符合横梁和立柱像素的行数和列数分别确定横梁和立柱的粗。这样就确定这整张图片中球门的各个特征点的位置坐标,根据位置左边重构球门图像。图3为采用上述各步骤算法处理后对应的图像结果示意图,经上述算法处理后得到二维图像大小为721像素×961像素,各特征点坐标为:上梁200,横梁宽16,左立柱45,右立柱928,立柱粗15,球门底线501,原图倾斜角度0.019 997 rad,约1.145 8°。
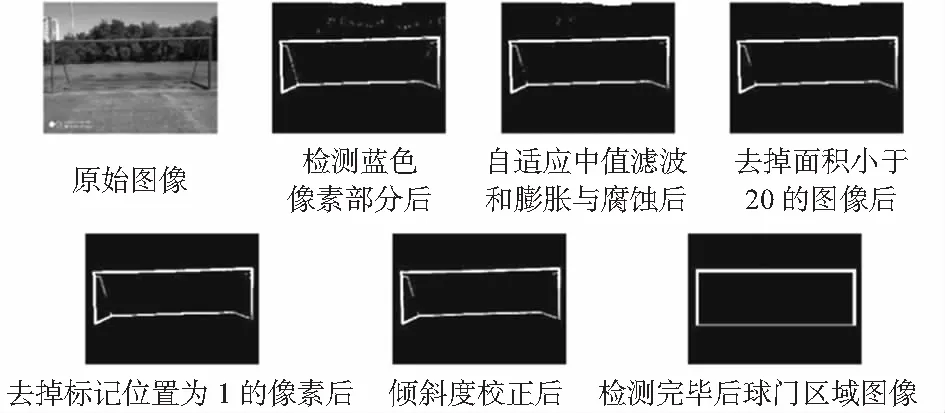
图3 球门位置判别过程各步骤处理后的结果
2.2 足球位置判别算法与仿真
取相同场地2019年1月20日拍摄的另一张图片,该图像中含有进门瞬间的足球。图片原始图像大小为720像素×960像素×3像素。球门位置区域按照上述检测方法处理后得到的二维图像大小为720像素×960像素,各特征点坐标为:上梁284,横梁宽5,左立柱257,右立柱747,立柱粗6,球门底线449,倾斜角度0 rad。检测出球门区域后,接下来就是检测足球的位置。具体处理方法是:
首先,根据已检测出的图片倾斜度将原RGB彩色图片进行倾斜度校正。然后根据已经检测出的球门区域将彩色图片进行剪裁。这样做是为了去除复杂背景的过多干扰,缩小图像尺寸降低后续算法的执行时间。
然后,将剪裁好的图片进行边缘检测,以期望得到足球的圆形外形。由于实际使用的足球色彩和花纹多样,训练时因新旧程度不一,足球表面存在不同程度的磨损或污渍,一次性使用Edge算法对图像处理不能得到理想的结果。考虑到RGB图像的特点及足球颜色与背景颜色的差别,将R、G、B三层数据分别取出形成3个二维图像,即imgR,imgG,imgB。然后进行各自边缘检测和综合逻辑与操作。
result=Edge(imgR)&Edge(imgG)&Edge(imgB)所得图像result中存在连续长直线的干扰,而足球轮廓比较模糊。为了去除长直线的干扰,将长直线进行擦除。具体方法是:设图像中某坐标位置的像素值为image(i,j),其中i为横坐标,j为纵坐标,根据直线的形态学特征和直线与圆形的形态学区别,如果存在以下两种情形之一,则image(i,j)清0擦除。
情形一为:
image(i,j)=1&image(i,j+1)=1&image(i,j+2)
=1&image(i,j+3)=1
情形二为:
image(i,j)=1&image(i+1,j)=1&image(i,j+1)
=1&image(i+1,j+1)=1
由于直线擦除算法执行时是从左至右从上而下逐个像素判别并擦除,故该部分程序只需要遍历一遍像素即可得到较好效果。这样处理后,长直线变为断续的一些小点。然后去除面积小于4的干扰点。接下来按照球门长7.32 m、高2.44 m,足球直径约21.5 cm的比例关系确定图像中足球的理论直径。其计算式如下

按照计算后的r值构建一个大小为2r×2r,半径为r的足球模型图。然后用这个模型图与处理好的图进行匹配。具体匹配的方法是:自图像矩阵的纵向i取第1行至倒数第2r行即与横向j取第1列至倒数2r列,遍历每个像素点img(i,j),分辨检测以当前像素点为左上端点的2r×2r矩阵,即img(i︰2r+i,j︰2r+j)与构建模型图的匹配程度。匹配度最高的位置即为实际图片足球所在位置,也易找到球心坐标。
如图4和图5所示为处理过程中各步骤处理后的图像。球门区域图片大小166像素×491像素,球心坐标(62,219),半径r=7。

图4 足球位置判别过程中各步骤处理后的结果1
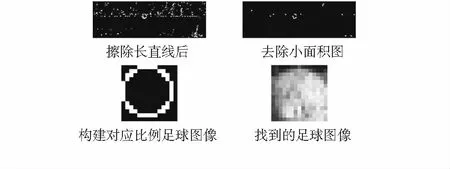
图5 足球位置判别过程中各步骤处理后的结果2
2.3 成绩的判断与示意图的重构方法
球心坐标和图像中的球半径r确定后,需根据图1所示的比例要求判断当前次射门的成绩,并向用户显示出示意图和分数。
根据前述分析结果,当前图像的比例为
根据图1所示的尺寸及计算出的rate可计算出该尺寸对应的实际像素数。根据计算结果可重构射门结果示意图,结果如图6所示。
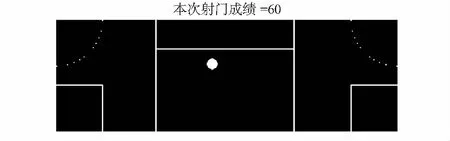
图6 判断结果示意
此时rate=1.730 8,处理后可使用户清晰的看到足球相对于球门的区域位置及本次射门的成绩。由图像处理结果可看出该图片的处理误差约在1~2个像素,最大误差为
2×rate=2×1.7308≈3.46 cm
完整的程序执行时间为4.794 s,响应时间完全能够满足实际训练和教学要求。如果使用的主机配置比实验用的主机配置高,则程序执行时间还可以缩短。
3 结 论
本设计采用一部1 200万像素的普通摄像头安装到足球场中限定区域内的任意位置进行图像采集。将采集到的无守门员情况下的射门图像按顺序逐步进行所述算法的多步处理即可判定出足球进门位置,可实现使用数字图像自动处理的方法辅助大学足球课程教学及训练,在足球射门训练过程中辅助教练员或教师自动的判别进门位置,从体育器材、体育服务等软硬件方面作出提升。
经过仿真和实验,证明该算法可以实现预设功能,误差在5 cm以内,响应时间在3.5 s以内,符合普通高校实际训练和上课要求。该算法在处理使用不固定位置的单目视觉拍摄于自然复杂背景环境的图像中识别大小差异较大的矩形、圆形等外形的物体并准确分割、倾斜校正、判断相对位置等算法方面具有一定的应用和参考价值。且算法的运行对计算机的配置要求很低,可以普遍适用。
猜你喜欢
结构工程师(2022年2期)2022-07-15
小学生学习指导(爆笑校园)(2021年12期)2021-11-23
灌篮(2019年15期)2019-11-26
体育风尚(2019年1期)2019-09-10
模具制造(2019年4期)2019-06-24
新商务周刊(2017年16期)2017-12-08
小雪花·小学生快乐作文(2016年4期)2016-05-14
小雪花·成长指南(2016年3期)2016-04-20
中国科技纵横(2015年10期)2015-12-13
小雪花·成长指南(2014年1期)2014-03-04
