
高g值压阻式加速度传感器仿真设计*
2022-06-28 01:22杨雨君陈曼龙张昌明陈芳芳
传感器与微系统 2022年6期
杨雨君, 王 鹏, 陈曼龙, 张昌明, 杨 帆, 陈芳芳
(陕西理工大学 机械工程学院,陕西 汉中 723000)
0 引 言
微机电系统(MEMS)压阻式传感器是微纳米量级的特征尺寸,具有体积小、性能高、线性度好、测量范围大、信号处理简单等优点[1,2],其在近50年中迅猛发展,广泛应用于微电子、机械学、电磁学、医学、信息工程等领域,已成为当今世界炙手可热的高新技术之一[3]。其中在航天航空、碰撞冲击、引信侵彻等特殊领域,瞬间产生的加速度值十分大,高g值加速度传感器广泛应用[4]。目前,针对高g值加速度传感器研究,主要存在的问题是灵敏度较低,现有高g值压阻式传感器量程大都在15×104gn以上,可满足特殊工况测量要求,但灵敏度一般在1~2 μV/gn。
最早加拿大Alberta 微电子中心研制出一种悬臂梁式硅微机械加速度传感器,可承受1×104gn的加速度冲击,灵敏度仅为 0.72 μV/gn[5];美国恩德福克公司研发了7270A高g值加速度传感器,性能优良,封装后质量仅为1.5 g,大小为14.22 mm×7.1 mm×2.79 mm,量程最高可以达到20×104gn,灵敏度为(1±0.5)μV/gn[6];上海微系统所的王钻开等学者研制开发了三梁—双岛结构的高g值加速度传感器,灵敏度为1.43 μV/gn[7];中北大学石云波团队提出了“双端固支梁—质量块”压阻式加速度传感器结构,灵敏度为1.41 μV/gn[8],合肥工业大学许高斌等学者设计了基于绝缘体上硅(silicon on insulator,SOI)的高g值MEMS加速度计,该结构为“三梁—扇形”,X与Y两个方向的灵敏度分别为1.2 μV/gn和 1.18 μV/gn[9]。
本文针对高g值传感器灵敏度较低这一问题,设计了一种新结构,在满足15×104gn加速度的测试需求时,尽可能提高灵敏度。
1 传感器结构设计
根据实际工作需要,确定设计指标:量程为±15×104gn;固有频率≥100 kHz;灵敏度≥4 μV/gn;最大应力小于硅的许用应力340 MPa。本文设计的高g值加速度传感器结构,质量块居于结构中心,增加对外界的输入响应,每边与两梁连接,梁分为支撑梁和敏感梁,支撑梁负责支撑质量块,提高固有频率,其厚度与质量块相同,敏感梁厚度较薄,提高灵敏度,其上需要制作压敏电阻,敏感方向为拉压方向。传感器的工作方向在水平面内,在传感器进行封装时,质量块上下设计一个凸台结构,距质量块距离为0.5 μm内,限制Z方向移动,避免结构在非测量方向受到较大惯性力而发生破坏。整体结构简单,所有梁的末端设计呈延伸无拐角结构,提高使用寿命。压阻式加速度传感器结构如图1所示。
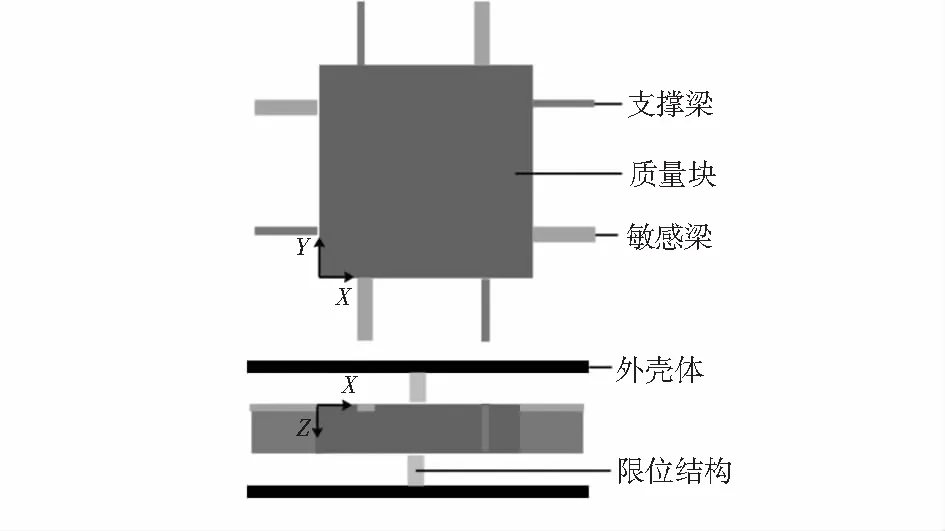
图1 压阻式加速度传感器结构示意
2 传感器结构参数分析
利用有限元软件对传感器结构进行参数分析,同时结合工艺加工需求,得到传感器结构主要尺寸参数范围,如表1所示。
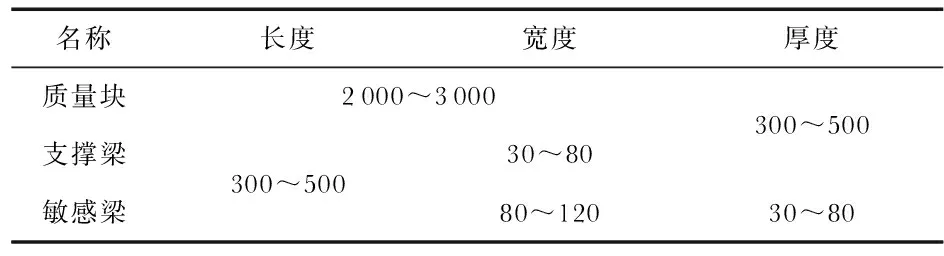
表1 传感器结构主要尺寸参数范围 μm
在参数分析时,质量块厚度和支撑梁厚度相等,敏感梁长度和支撑梁长度相等,质量块长、宽相等,由9组参数变为6组独立参数,P1参数为质量块长度与宽度,P2参数为质量块厚度与支撑梁厚度,P3参数为支撑梁长度与敏感梁长度,P4参数为支撑梁宽度,P5参数为敏感梁宽度,P6参数为敏感梁厚度。
在传感器参数的选择上,主要考虑参数对传感器两大性能指标的影响,一是灵敏度,二是固有频率[10]。
由图2(a)可知,随着P1增加,灵敏度上升,一阶固有频率下降,应合理选择P1,使二者达到相对最优;P2增加,灵敏度和一阶固有频率都上升,但同时要考虑,随着P2参数增加,支撑梁纵深加工增加,其加工难度变大。由图2(b)可知,在参数范围内,P3和一阶固有频率呈负相关,对灵敏度几乎无影响,所以P3参数在选择上,在保证结构性能基础上,可尽量小一些;P4与灵敏度呈负相关,与一阶固有频率呈正关系,P4对灵敏度影响达4 μV/gn左右,对一阶固有频率影响在30 kHz,P4选择对结构传感器性能有较大的影响,选择较小宽度的支撑梁,灵敏度将会提升,但固有频率相对较低,选择较大宽度的支撑梁,可以提高固有频率,但灵敏度降低,所以,P4是传感器结构设计的重要一个参数,要选择适当既保证传感器的灵敏度,又能获得较快的响应速度。图2(c)所示为P5、P6和灵敏度、一阶固有频率的关系曲线,将两图与前面的图横向比较,可以看出,P5、P6的尺寸选择对传感器的性能影响不大,在参数范围内对灵敏度影响在1 μV/gn内,对一阶固有频率影响在2.5 kHz内。P5和P6主要影响的是压敏电阻制作与电路布置,适当选择即可[11]。

图2 结构参数与灵敏度、一阶固有频率的关系
最终选择质量块尺寸为2 500 μm×2 500 μm×400 μm(长×宽×厚),支撑梁尺寸为650 μm×50 μm×400 μm(长×宽×厚),敏感梁尺寸为650 μm×100 μm×50 μm(长×宽×厚)。
3 传感器敏感梁表面应力分布规律
按照上述尺寸建立三维模型,利用有限元软件对敏感梁上应力进行分析,提取以敏感梁表面中心为路径,1为路径起点,2为终止点4条路径,如图3和图4为路径及路径上应力值。在X方向作用时,通过传感器敏感梁各路径应力折线,可以准确知道路径上应力变化趋势,分析得出如下结论:1)路径A、C的应力变化远大于路径B、D,即与加速度平行的方向为传感器工作方向;2)A所在敏感梁受拉,C所在敏感梁受压,据固定架相同距离,应力变化值大小相同,方向相反;3)加速度在Y方向作用时,应力变化趋势与X方向相同。上述分析的结果可为下步传感器的电阻排布和惠斯通电路设计提供方向。

图3 A、C路径应力折线
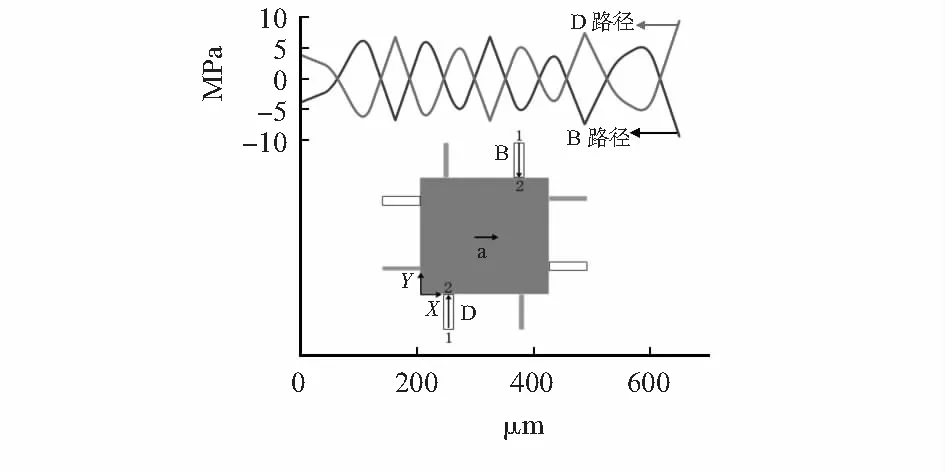
图4 B、D路径应力折线
4 测量电路设计与分析
传感器的测量电路设计主要包括压敏电阻位置设计和惠斯通全桥电路连接方法设计[12]。根据压阻效应可知,半导体材料在外加应力作用下,材料的电阻率发生变化,压敏电阻应该排布在应力分布较大且线性较好的区域。由第3章中总结的传感器敏感梁表面应力分布规律,确定压敏电阻的位置如图5所示。压敏电阻通过离子注入或扩散工艺制作,距敏感梁短边100 μm处,压敏电阻长为50 μm,宽为20 μm,深度为5 μm,既可避开非线性区域,又能保证获得较大的应力[13]。

图5 压敏电阻布置示意
传感器测量电路设计要求,要保证测量方向加速度具有较高灵敏度,本文采用惠斯通全桥电路,如图6所示,图中R1~R8为电桥的8个压敏电阻,初始条件下阻值大小相等为R,当有加速度作用传感器时,根据第3章中结论(2)可知,R1和R4的变化率为ΔR1,R2和R3的变化率为ΔR2,R5和R8的变化率为ΔR3,R6和R7的变化率为ΔR4,电桥输入电压为E,电桥的输出电压为UX和UY。
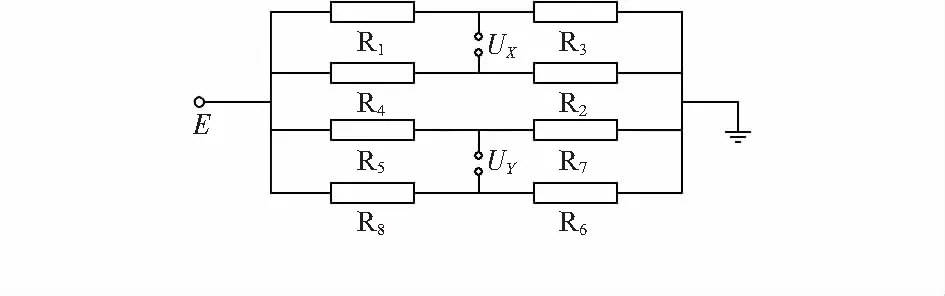
图6 惠斯通测量电路
使用两个输出端UX、UY,一是相互独立,UX输出X方向的加速度值,UY输出Y方向的加速度值,防止两者干扰;二是根据第3章中的结论(1)可知,受到X方向作用时,UX输出X方向的加速值,UY输出的值很小,可忽略不计,如果UY输出异常,说明传感器与受力方向存在偏角,测量结果可能不准确,同理Y方向测量亦如此。
当传感器受到X方向加速度时
UX=
(1)
因为R≫ΔR,所以
(2)
此时UY的输出可忽略不计。当传感器受到Y方向加速度时
UY=
(3)
因为R≫ΔR,所以
(4)
同理,此时UX的输出可忽略不计。其中
(5)
式中π为压阻系数,σl为纵向的应力,σt为横向的应力[12]。
5 仿真结果分析
5.1 静态分析
对高g值加速度传感器结构进行静态仿真,在X方向与Y方向满量程作用时,保证应力不超过材料的许用值,传感器结构能够有效工作,由图7可知,在加速度满量程15×104gn时,X方向最大应力为210.9 MPa,Y方向最大应力为213.5 MPa,Z方向最大应力为102.7 MPa,都小于许用应力340 MPa,满足设计要求。

图7 X,Y方向传感器结构应力云图
5.2 灵敏度分析
压敏电阻的材料类型选择P型Si,弹性模量为1.66×1011N/m2,密度为2 331 kg/m3,泊松比为0.28[14],输入电压5 V。
在X方向作用不同加速度冲击下,对加速度传感器进行仿真分析,将仿真结果代入式(1),计算得到输出电压,如表2所示。

表2 X方向输出电压
拟合输出电压曲线如图8所示,拟合方程为
UX=0.004 371 62 mV/gn×a+0.001 926 98 mV

图8 X方向灵敏度拟合直线
在Y方向作用不同加速度冲击下,对加速度传感器进行仿真分析,将仿真结果代入式(3),计算得到输出电压,如表3所示。

表3 Y方向输出电压
拟合输出电压曲线如图9所示,拟合方程为
UY=0.004 44 mV/gn×a+0.004 41 mV

图9 Y方向灵敏度拟合直线
根据拟合方程可以得出,在加速度为1×104~15×104gn范围内,得到Y方向灵敏度为4.44 μV/gn,X方向灵敏度为4.37 μV/gn,灵敏度满足设计要求。
5.3 模态分析
利用Ansys中的Model模块对所设计的高g值加速度传感器进行前4阶固有频率分析[15],得到前4阶固有频率和模态,如图10所示,一阶固有频率为105.80 kHz,二阶固有频率为165.93 kHz,三阶固有频率为171.68 kHz,四阶固有频率为172.15 kHz,固有频率满足设计要求。
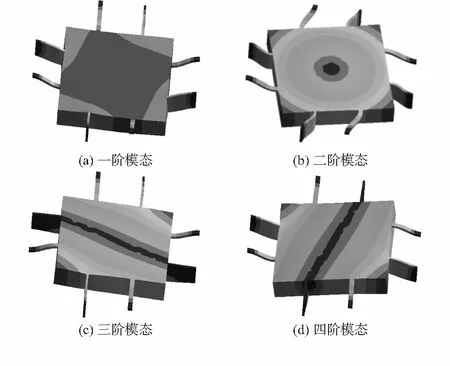
图10 前四阶模态振型
6 结 论
本文设计和研究了一种用于测量高g值加速度传感器结构,通过参数分析确定了传感器的结构尺寸,利用合理的电阻排布和惠斯通电路,实现了平面内X或Y方向的加速度测量,进行有限元仿真,获得了应力分布、灵敏度、固有频率的传感器性能指标,验证了该结构的可行性。该结构X方向灵敏度为4.37 μV/gn,Y方向灵敏度为4.44 μV/gn,量程可达15×104gn,一阶固有频率为105.80 kHz,能满足高g值环境下测试需求。
猜你喜欢
机械传动(2022年10期)2022-10-21
当代水产(2022年6期)2022-06-29
现代电力(2022年2期)2022-05-23
化工机械(2022年1期)2022-03-21
Journal of Geriatric Cardiology(2021年1期)2021-03-03
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
北京航空航天大学学报(2017年5期)2017-11-23
探测与控制学报(2015年4期)2015-12-15
