
一种四自由度操作臂机构设计
2022-06-28 09:38:08刘荣海祝胜山杨迎春
机械设计与制造 2022年6期
刘荣海,祝胜山,杨迎春,常 勇
(1.云南电网有限责任公司电力科学研究院,云南 昆明 650217;2.中国科学院沈阳自动化研究所,辽宁 沈阳110016;3.沈阳理工大学,辽宁 沈阳 110059)
1 前言
变电站电力设备X射线数字成像检测系统已经成功应用于GIS、干式变压器、电流互感器、电压互感器、合闸电阻等设备的检测;目前在GIS检测中的应用主要是依靠人工方式来完成,其现场检测,如图1所示。
现场检测主要存在的问题有:
(1)布置设备速度慢,自动化程度不高;
(2)设备体积与重量较大,展开过程工作量大;
(3)工人劳动强度大、危险性高。
为解决上述问题,在本文中拟设计一款专用于GIS检测的操作臂,该操作臂末端搭载X射线数字成像检测系统,代替人工完成对GIS等电力设备的检测。由图1可以看到,被检测的设备的跨距较大,因此该操作臂将搭载在移动平台上。主要讨论的是满足GIS设备检测的操作臂机构设计,包括构型、自由度数以及机构尺度的设计。

图1 GIS现场检测Fig.1 The Detection Site of GIS
2 机械臂的自由度数及构型设计
2.1 机械臂自由度数目的确定
由前言的叙述可知,该机械臂应该具有的功能是能够夹持X射线发射机完成对GIS设备照射与检测。因此,要求机械臂的末端能够实现对GIS筒体的位姿调整,这就牵涉所要设计的机械臂自由度的问题,一般而言,机械臂的自由度数目越多,动作就越灵活,通用性就越强:但自由度数目越多,机械臂的结构就越复杂,控制就越困难,所以目前机械臂常用的自由度数目一般不超过(5~6)个。
由于这里的机械臂是装载在移动载体上,为了减少机械臂的自由度数,使用移动载体所能提供的在水平面上沿两个方向水平移动的自由度,因此操作臂主要提供末端X射线成像系统在高度方向的调整、X射线发射机俯仰调节能力以及水平位置的微调。下面讨论机械臂的构型设计及自由度设计。
串联关节型机器人关节通常只有转动型和移动型两类。通常串联关节型机器人前三个自由度决定了末端作业工具的空间位置。Huang 和Milenkovic 采用双字母代码表示法对机器人结构进行分类[1]。第一个字母代表第1个关节类型以及第1个关节与第2个关节的轴线关系;第二个字母表示第3个关节类型以及第3个关节与第2个关节的轴线关系。这里仅讨论关节轴线为平行及垂直两种情况。所用代码及其含义分别为:S是移动副;C是轴线平行于移动副的转动副;N 是轴线垂直于转动副的转动副;R是轴线与移动副垂直或者与转动副平行的转动副。
在这里仅考虑前三个关节的排布形式,由上述对于关节类型的介绍可知:所有关节的排列组合一共有16种。如表1所示。
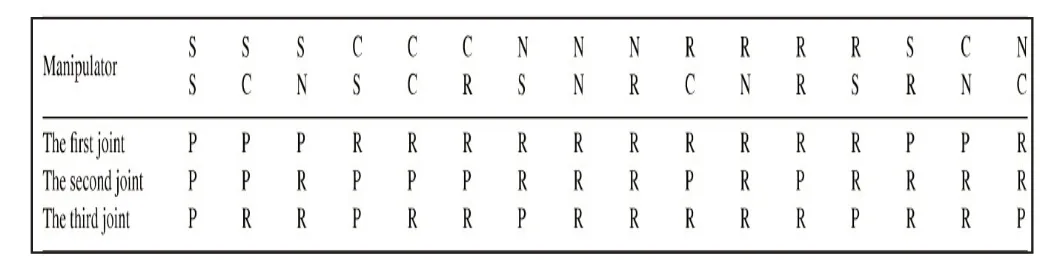
表1 16种关节排布组合Tab.1 The Combinations of 16 Kinds Joint Arrangement
要对这16种组合进行比较好坏,有两种比较方法[2-4]。
2.2 基于机构参数的比较
结构长度参数的定义如下:

式中:L—机械臂各杆件的长度之和;V—机械臂的工作空间的体积。
式(1)的值越小,表示的是机械臂可以以最小的杆长获得最大的工作空间。对上述16种组合分别计算其结构参数值,如表2所示。
由表2可以看到第一组的QL值普遍较小,可以作为在设计机械臂关节排布时的一组首选组合。
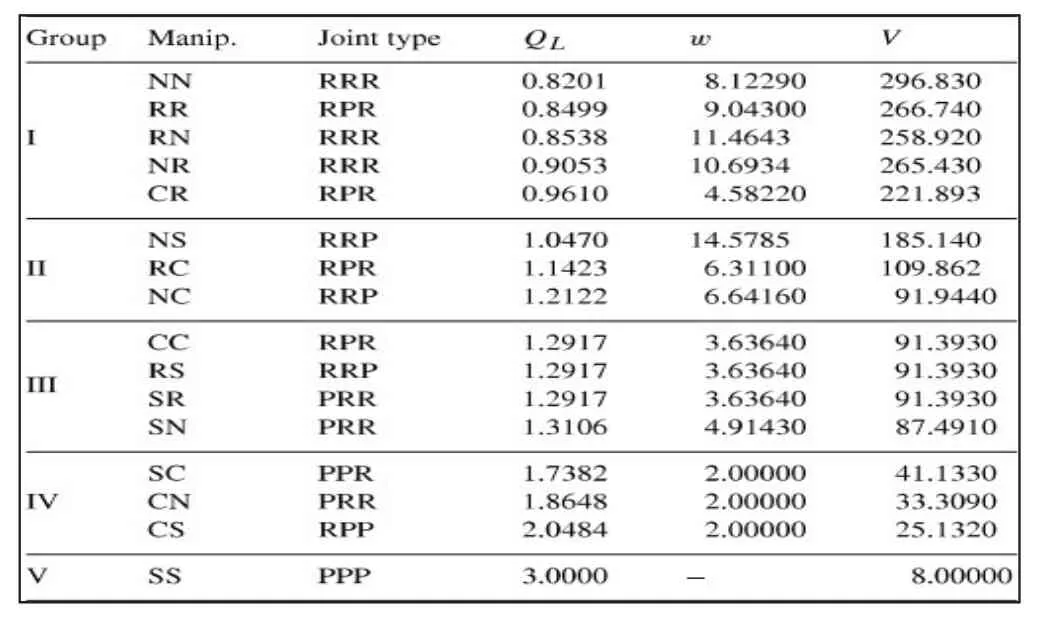
表2 关节排布的结构长度参数Tab.2 The Length of the Structure Parameters of the Joint Combinations
2.3 基于全局的灵活性比较
此处全局灵活性的定义如下式所示:


表3 关节排布的全局灵活性Tab.3 The GCI of Joint Combinations
同样地可以看到第一组中的全局灵活性值比较高,因此第一组可作为设计机械臂关节排布形式的首选。
综合以上两种情况可知,设计机械臂关节排布形式的时,可以采用表2与表3中的第一组的交集,交集得出的关节排布形式既能满足以较小的连杆长度获得较大的工作空间,又能满足在整个工作空间内机械臂的灵活性最高。表2、表3的交集为:NR,因此在本课题的设计中前三个关节的排布形式为NR。
机械臂安装在移动载体上实现在水平地面内的移动,机械臂本体实现末端X射线发射机在Z方向的高度、俯仰角以及偏航角的调整。通过以上的分析可以看出机械臂只需要四个自由度就能满足X射线发射机的作业要求。
3 机械臂连杆运动尺寸优化约束及目标函数的建立
在本文设计的机械臂,要求机械臂在装载X射线发射机的情况下,在竖直Z方向上的工作范围为[ 330 1530 ],GIS机械臂现场工作的过程图,如图2所示。
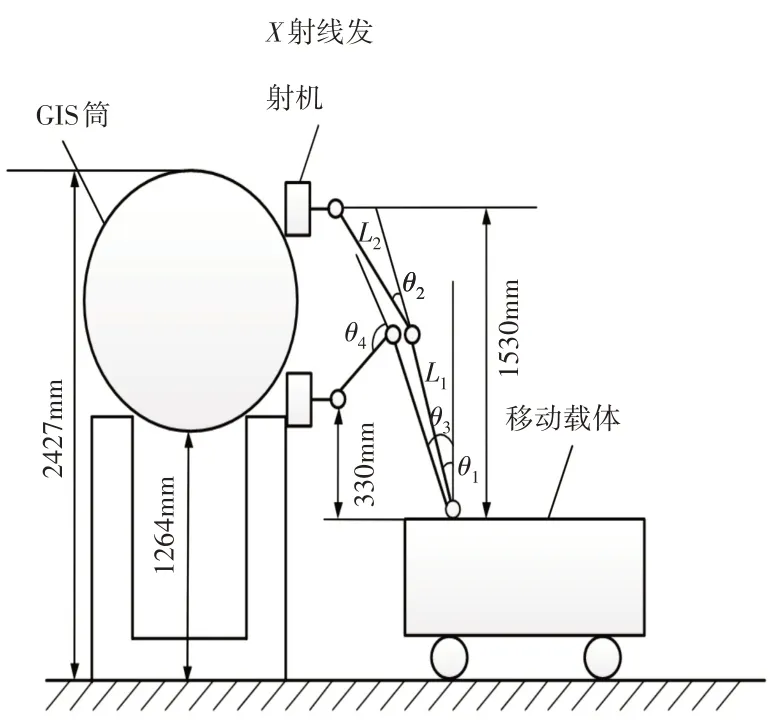
图2 GIS机械臂现场工作的过程Fig.2 The Process of Field Work of GIS
在图2所示的工作过程中,需要根据GIS机械臂实际工作的需求,依据一定的原则设计出GIS机械臂的运动学尺寸。根据文献的研究结果表明,无论是以结构长度为目标函数进行优化,还是以灵活度进行优化,或者是两者结合进行优化,前两个杆件是对这两者最具有影响的[4],因此,出于简化分析的角度,只对于机械臂的前两个杆件进行优化。
3.1 基于广义曲柄摇杆的机械臂尺寸约束条件1
为了使得机械臂灵活工作空间最大化,假想在空间有一点A,由于要求操作臂的最后一个连杆可以任何位姿接近于末端一点A,所以,此时可以将A点想象成一个铰链,因此图2中的X射线发射机就可以当成一个曲柄,这样L1,L2,以及X射线发射机就构成了虚拟的曲柄摇杆机构,于是根据曲柄摇杆构成的条件可以推出约束条件1。

3.2 基于任务要求机械臂尺寸约束条件2
在这里中限定机械臂关节角θ1的范围为:[-10°10°],θ2的工作区域为[20°150°]。根据上面图2的任务要求,可以将约束条件2整理成下面的表达式:

3.3 基于任务要求及力矩要求机械臂尺寸约束条件3
在机械臂执行任务时,不希望操作臂的力臂过大,即要求工作的过程中,末端负载能尽量的靠近基座,在这里限定机械臂末端到基座的距离小于1000mm,同样地,将机械臂关节角θ1的范围为:[-10°10°],θ2的工作区域为[20°150°]代入整理后有如下:

3.4 基于力可操作度的目标函数的建立
所谓的力可操作度的定义如下:在当前的位形状态下,系统若能以较小的关节驱动力对物体沿指定方向施加较大的作用力,则认为沿此方向的机器人位姿的力可操作度性好,反之较差。
由图2 可知,本次所设计的操作臂主要是在竖直方向上运动,因此可以直接以在竖直方向上的力可操作度最大作为目标函数,并且操作臂末端在竖直方向上运动,因此U=[0,0,1];J(q)代表的是操作手末端的雅克比矩阵。因此将J(q)与U代入到式(1)中,整理后操作臂的力可操作度如下式所示:

式 中:c1—cosθ1;c12—cos(θ1+θ2);s1—sinθ1;s12—sin(θ1+θ2);L1—连杆1的运动尺寸;L2—连杆2的运动尺寸,以下符号含义相同。
3.5 机械臂加速度性能的计算
文献[8]在考虑到重力,向心力,哥氏力对机构的影响下,针对于串联机械臂,提出了一种加速度性能指标,加速度性能指标的定义如下:

式中:kH—加速度性能指标其值的大小表征了机械臂对关节角误差从关节空间映射到笛卡尔空间的放大因子,因此其值越小越好,‖H‖—机构二阶影响系数矩阵。
根据文献[9]提出的二级系数影响矩阵可以求得GIS 机械臂的二阶影响系数矩阵

3.6 灵活性指标的计算
一般工程应用中利用雅克比矩阵J(q)的条件数作为评价机器人灵活性能的指标,在这里将这一指标作为一个优化的目标函数。
所以根据条件数的定义可知:该雅克比矩阵的条件数为:

4 机械臂连杆尺度优化
4.1 各目标优化函数权重的计算
由上文可知,本次优化问题属于多目标的优化问题,即在优化的过程中,有三个准则,所以首先通过相互比较确定各准则对于目标的权重,即构造判断矩阵。在层次分析法中,根据各个目标的重要程度,构造出的判断矩阵,如表4所示。
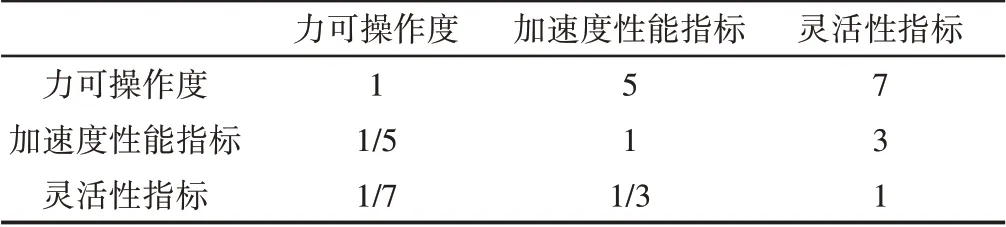
表4 判断矩阵Tab.4 Judgment Matrix
根据上述的判断矩阵通过MATLAB 编程可以计算出,在优化过程中力可操作度的权值为0.73064,加速度性能指标为0.18839,灵活性指标为0.080961。
4.2 优化模型的建立及求解
根据上文中的叙述可以建立运动学尺寸优化的数学模型如下式:

采用MATLAB中的fmincon非线性优化目标函数可以计算得到机械臂的运动学尺寸为:

4.3 优化模型的优化指标的分析
针对于所建立的GIS机械臂模型采用MATLAB机器人工具箱绘制出其模型,如图3所示。
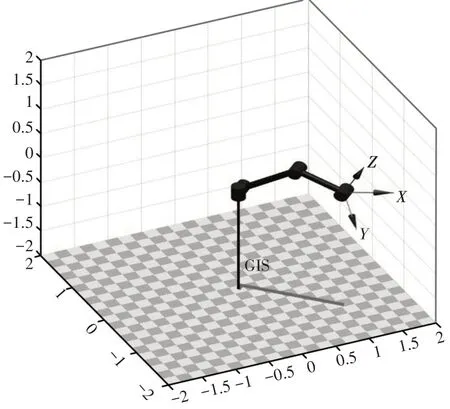
图3 GIS机械臂的MATLAB模型Fig.3 The Matlab Model of GIS Mechanic Arm
通过对上图机械臂的编程可以求得在整个运行过程中力可操作度的图像,如图4所示。
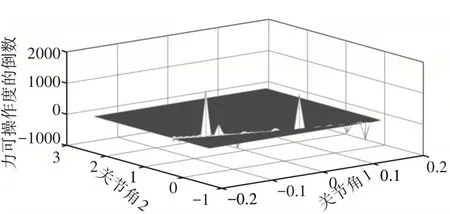
图4 GIS机械臂的力可操作度指标Fig.4 The Operational Index of Force of GIS
由图示可知在绝大多数区域中,力的可操作度倒数范围均在[0 1]之间,对整个区域中力可操作度的倒数求均值为:=0.0887,即优化后的大部分区域力的可操作度均较好。GIS机械臂的加速度性能指标,如图5所示。

图5 GIS机械臂的加速度性能指标Fig.5 The Acceleration Performance Index of GIS
由图5可知,在工作范围内大部分的加速度性能指标的倒数都比较低,即加速度性能较好,其平均值为:=2.83,可以看到究其原因是因为在优化的时候加速度性能的权重小于力可操作度的权值,在工作范围内的灵活性,如图6所示。

图6 GIS机械臂的灵活性指标Fig.6 The Flexibility Index of GIS
由上图6看到,优化后的机械臂的灵活性相当理性,基本上控制在了1以下,整个工作范围内的灵活性的均值为k(-J)=0.4686。
5 结论
首先从结构长度参数以及全局灵活性出发,通过比较得出了两者兼顾较优的NR构型作为本次设计所采用的构型,然后通过实际GIS检测中对机械臂的工作要求,推导出了约束条件,然后又分别的从任务方向上的力可操作度,机械臂加速度性能指标,机械臂灵活性指标出发推导出了机械臂优化的目标函数,最后通过层次分析法将多目标函数转换为单目标函数进行优化,最后通过仿真验证了优化后的GIS机械臂,其力的可操作度、加速度性能指标以及灵活性指标均较为理想。
猜你喜欢
中学生数理化·八年级物理人教版(2023年10期)2023-11-30 01:57:54
机电安全(2022年5期)2022-12-13 09:22:26
河北电力技术(2021年2期)2021-07-29 09:16:32
石油沥青(2021年1期)2021-04-13 01:31:08
科学(2020年1期)2020-01-06 12:21:34
制造技术与机床(2019年4期)2019-04-04 12:21:24
家庭影院技术(2018年11期)2019-01-21 02:20:44
制冷技术(2016年4期)2016-08-21 12:40:30
测绘科学与工程(2016年4期)2016-04-17 06:51:14
电测与仪表(2014年16期)2014-04-22 05:20:20
