
汽车安全带卷收器加速锁止临界状态运动学分析
2022-06-28 09:37:10谭邦俊
机械设计与制造 2022年6期
疏 剑,谭邦俊,程 林,郭 凡
(1.滁州职业技术学院机械与汽车工程学院,安徽 滁州 239000;2.吉林大学机械与航空航天工程学院,吉林 长春 130025)
1 引言
汽车安全带组件,包括汽车安全带及其收纳装置,是为了在碰撞时对乘员进行约束以及避免碰撞时乘员与方向盘及仪表板等发生二次碰撞或避免碰撞时冲出车外导致死伤的安全装置,因此车辆安全带属于强制装备[1-2]。安全带实物图,如图1所示。

图1 汽车安全带卷收器展示图Fig.1 Display of Car Seat Belt Retractor
主要由卷收器、吊环、织带、带扣、安装固定点等组成[3],卷收器是安全带系统中最重要的部件,也是最复杂的机械构件,用于收卷、贮存部分或全部织带,并起到特定锁止功能的装置[4],其本体里面的加速锁止敏感机构是整个安全带产品设计与测试的关键部分。
当汽车在发生瞬间碰撞时,车上乘员会产生多方向的外力,相应的外力会传导到汽车安全带,若汽车安全带在这些外力的作用下仍然能够从安全带的收放器中继续拉出而变长,则汽车安全带就不能起到相应地保护作用。
安全带卷收器的本体固定,织带受到加速拉出而能进行紧急锁止的性能称为安全带的带感锁止,简称为“加速锁止”[5],在发生紧急状况时,安全带卷收器的紧急锁止性能尤为关键[6],卷收器的加速锁止机构是被动安全系统的重要组成部分,安全带的重要性甚至超越了安全气囊[7-8]。
工业企业通用的安全带带感锁止测试方法为:将安全带全部抽出,在卷收器卷簧预紧力的作用下让织带自然回收约300mm,再利用带感测试装置从静止开始加速牵引织带(测试加速度选取(0.5~2)G某一个值)0.2s,如果织带在被抽出(50~150)mm的范围内锁止,则安全带的带感测试合格,否则带感测试不合格[5]。目前我国生产的安全带卷收器主要还是参考国外主机厂的结构,对安全带卷收器加速锁止的研究文献也并不多见,文献[9]为研究卷收器锁止时间,对某款安全带的带感、车感及承力锁止机构建立了运动学方程并获得了其解析解。文献[3,10]对安全带卷收器的工作原理及内部结构进行了较为详细的描述,建立了相关的力学模型。项目团队前期针对目前通用的安全带带感锁止测试方法,卷收器工作原理及简化模型进行了运动学研究。在此基础上,进行了锁止临界过程的运动学分析,即求该过程的锁止时间、机构转动角度关于“接触力”的运动学方程。根据该方程结合matlab仿真数值,可以得到不同测试加速度下安全带卷收器到达临界状态所花费的“锁止”时间及敏感机构的转动角度,研究结果为卷收器设计参数的初步验证、卷收器锁止全过程的理论分析与数值仿真提供基础数据和运动学方程的初始解,是卷收器锁止全过程运动学分析的前提。
2 卷收器加速锁止机构到达临界状态过程
图1 中的卷收器本体结构加速锁止原理的简化力学模型[3,11],如图2(a)所示;匀加速转动θ角度后角度的几何关系图,如图2(b)所示。
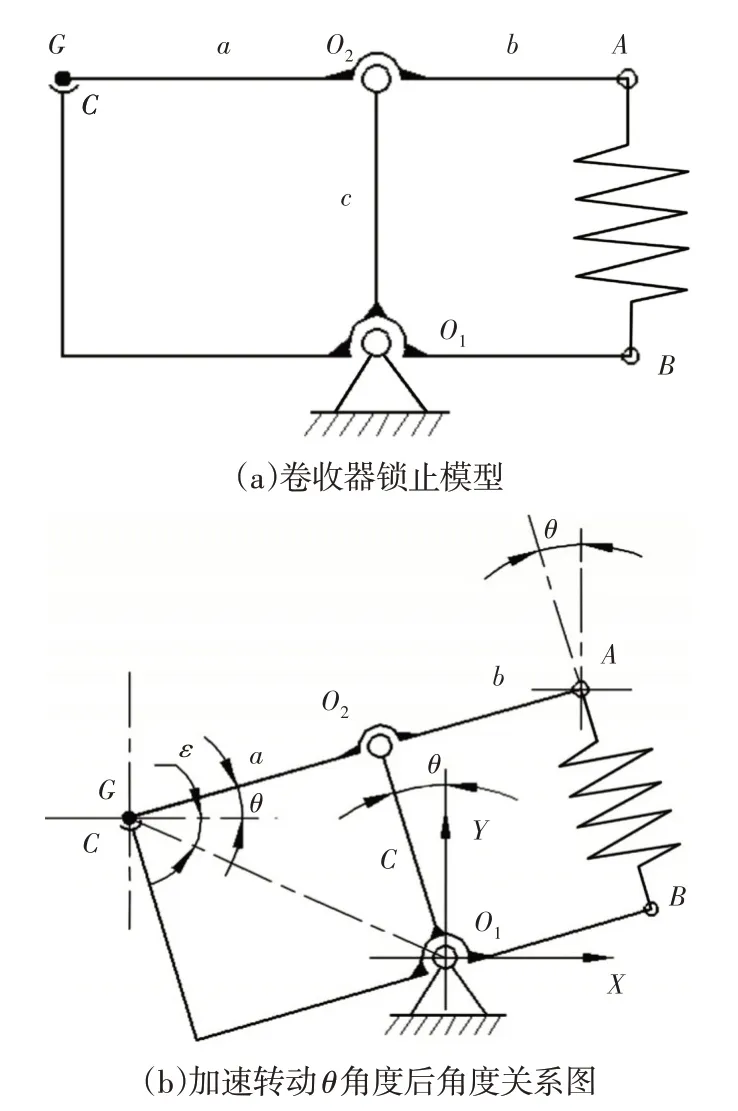
图2 卷收器加速锁止到达临界状态的位置关系Fig.2 Position Relation of Retractor Acceleration Lock to Critical State
安全带卷收器加速锁止到达临界状态过程原理如下所述。如图2(a)所示,杆O1O2、杆O1B及弯杆CO1固结,三根杆组成了锁止摆轮,其可以绕O1点转动;杆GA为惯性摆块、质心为G点,其可以绕O2点转动;AB之间有压缩弹簧,初始状态时弹簧被压缩,此时G点与C点有接触力。中杆GO2、O2A、O1O2的长度分别为a、b、c,如图2(a)所示。当匀速抽拉安全带时,锁止摆轮可以作匀速整周运动,G点与C点之间存在接触力。当车辆受到猛烈撞击时安全带被加速抽拉,锁止摆轮随之做加速运动,当加速度到达一定程度时,由于惯性,G点与C点的接触力会逐渐减小,随后两点开始分离,当GA杆滞后于固结杆O1O2的角度θ1达到给定值的时候,固结杆O1O2触发类似棘轮的锁止机构从而让安全带进行紧急锁止。锁止摆轮加速转动θ角后各杆的相对位置关系(G点与C点接触),如图2(b)所示。为后续更好地分析滞后角度θ1,这里仅讨论C点和G点接触力从初始状态变成零的运动学分析。
3 锁止敏感机构加速过程的加速度及受力分析
为了进行卷收器锁止机构到达临界状态的运动学分析,得到该过程接触力、加速度与时间的运动学方程,有必要对锁止敏感机构进行加速度及受力分析。其临界可直接用C点和G点接触力为零进行表达,到达临界过程的运动学分析可归结为求形如f(T,·θ·,t)=0的运动学方程。根据达朗贝尔原理,该运动学方程的求解,关键在对GA杆进行加速度及受力分析,图2(b)GA杆中各点加速度及受力分析,如图3 所示。设定弹簧的预压缩量为X1,定义X正方向为正,Y的正方向为正,逆时针转动转矩为正,从初始状态到达临界状态过程中,可对GA杆进行受力分析并建立平衡方程。
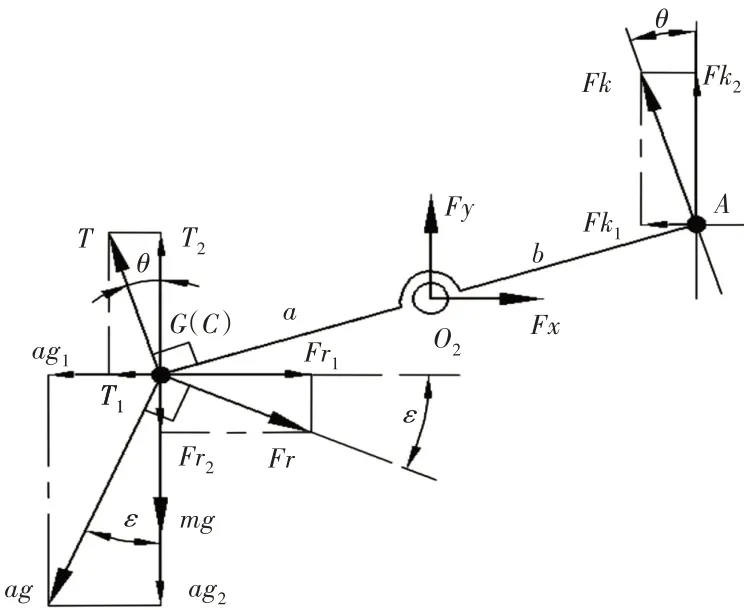
图3 GA杆各点的加速度及受力分析Fig.3 Acceleration and Force Analysis of GA Bar at Each Point
3.1 GA杆上G点的加速度及受力分析
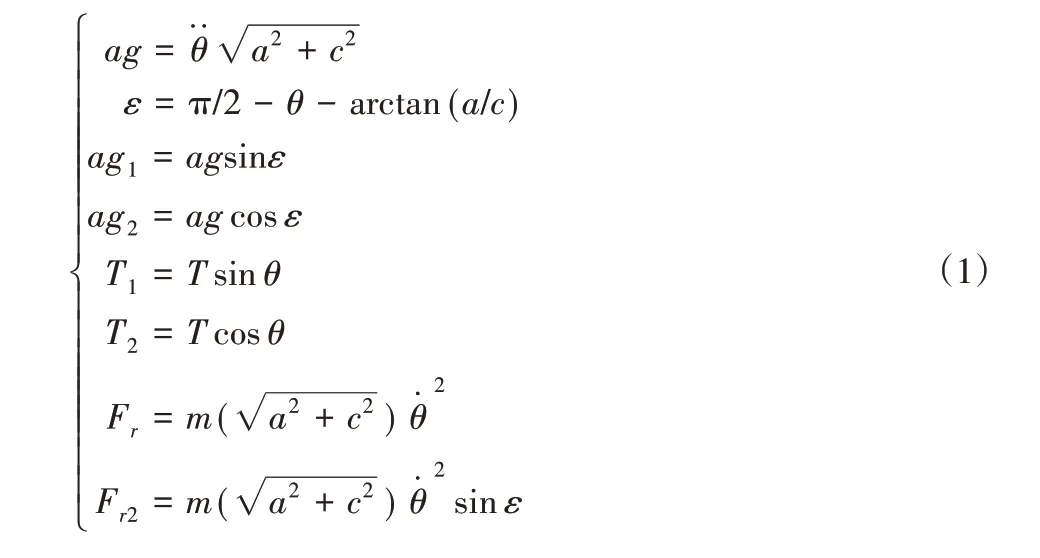
如图3所示G点在加速运动过程中,其切向的加速度ag可分解X负方向ag1和Y负方向ag2;其向心加速度可分解为Fr1和Fr2;同时还受到了接触力T可分解为T1和T2以及重力mg。结合图2(b)、图3,以下式子成立:
3.2 GA杆上A点的受力分析
由于G点和C点始终保持接触,因此A点受到了恒定的弹力作用,以下方程成立:

3.3 GA杆平衡方程及到达临界状态运动学方程建立
由固结杆O1O2作匀角加速度运动可知:

结合图2(b)、图3的加速度及受力分析可列如下的平衡方程:

再对G点取矩得到力矩方程:

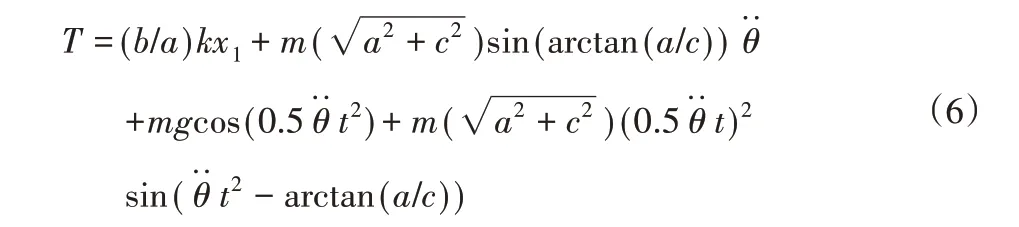
联立式(1)~式(5),消去Fx、Fy可得到关于T、·θ·和t的三元一次非线性方程:
4 数值计算
设计的卷收器结构模型相关参数,如图2(a)所示。利用该参数表可以进行卷收器锁止过程到达临界状态的数值计算,如表1所示。
现对上述得到的三元一次方程利用表1的参数进行数值计算,考虑量纲换算,(6)式可转化为:
根据表1结合(7)式,可利用matlab软件编程来讨论不同测试加速度条件下,到达临界状态速(接触力T为零)所需要的加速时间及O1O2转过的角度。
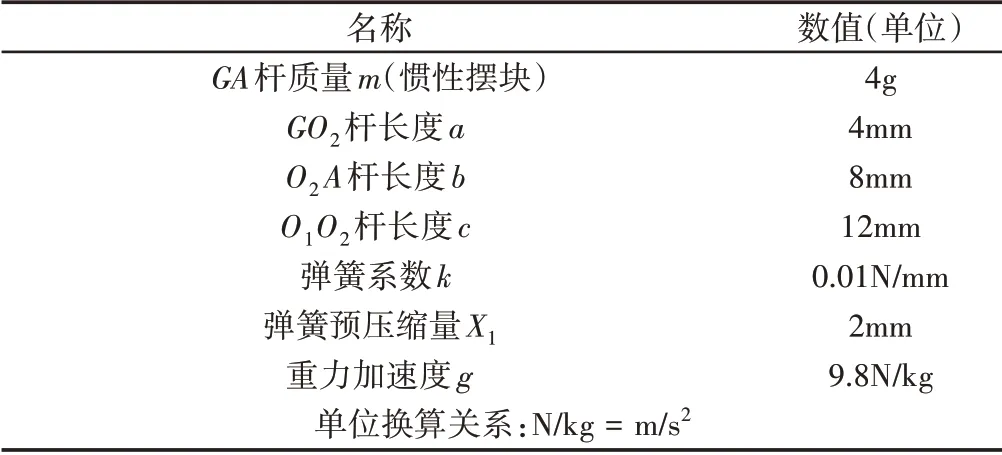
表1 卷收器锁止模型参数表Tab.1 Model Parameters of Retractor Lock
θ为测试时整个机构的转动角度,选取工业企业常用的0.5G、0.8G、1.0G及1.5G作为测试锁止加速度,加速时间区间为(0~0.3)s,如图4所示。通过图4可以得到当接触力为零时,不同测试加速度到达临界状态所需时间及机构转动角度,如表2所示。
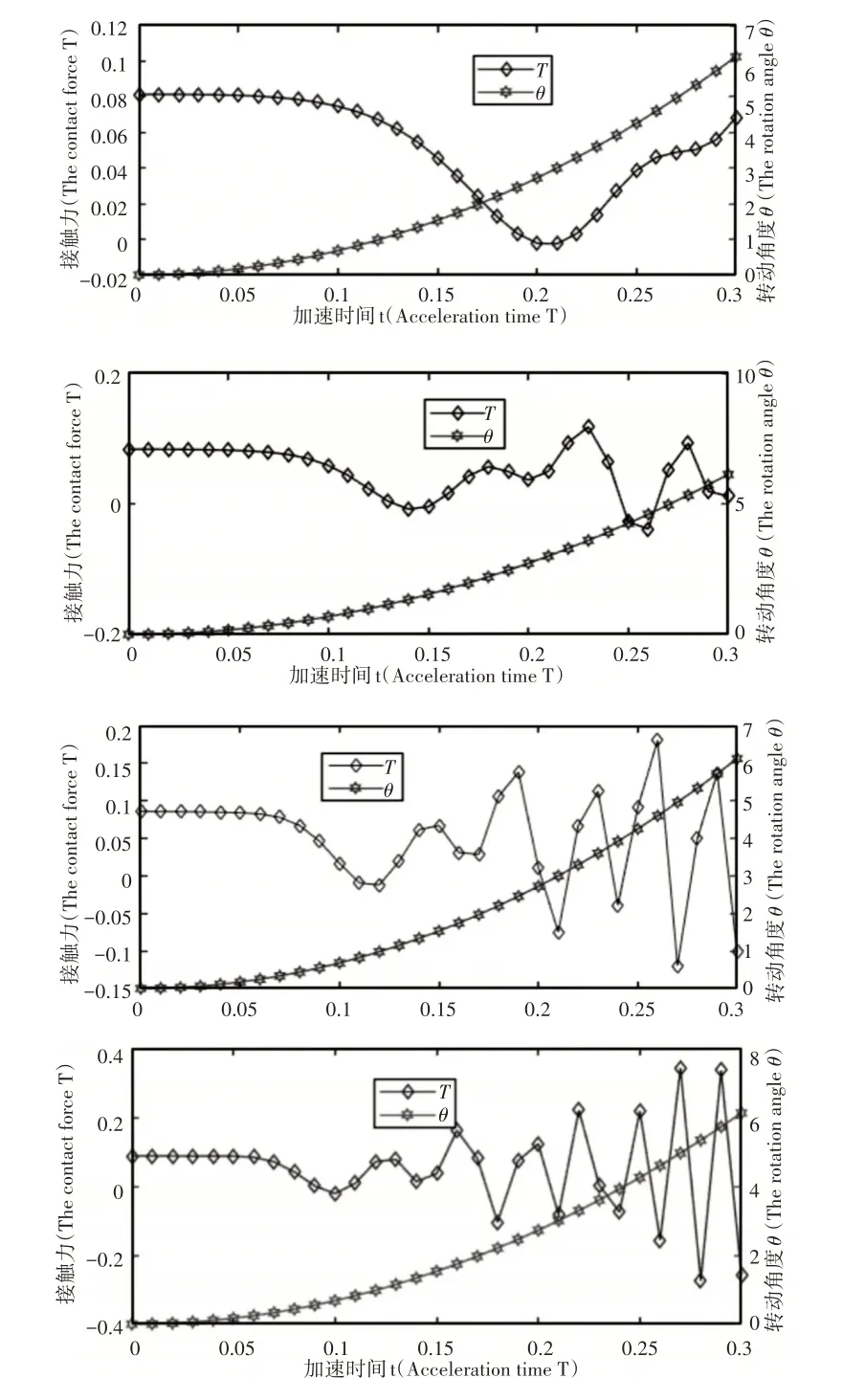
图4 不同测试加速度转动角度、接触力与加速时间关系Fig.4 Relation Between Rotational Angle,Contact Force and Acceleration Time of Different Test Accelerations
选取不同测试加速度到达临界状态所需时间及转动角,如表2所示。到达临界状态所需的加速时间均小于0.2s,且随着测试加速度增大,其到达临界状态所需加速时间越来越小,而安全带加速测试的法规要求车辆发生碰撞时在0.26s以内全完锁止,结合表2的加速时间及测试法规要求可以得到留给临界状态后期的加速锁止时间。另一方面来说,如果到达临界状态的加速时间已经大于0.26s,那么表1中涉及到的安全带锁止模型参数需要进一步优化和改进。
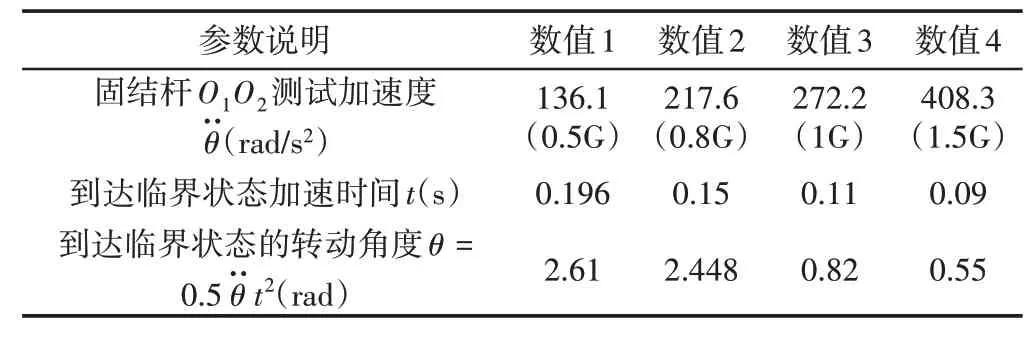
表2 选取不同测试加速度到达临界状态所需时间及转动角Tab.2 Selects the Time and Rotation Angle Required for Different Test Accelerations to Reach the Critical State
表2中到达临界状态的转动角度随测试加速度增大而逐渐减小,而越过临界状态后固结杆O1O2再转动某个角度将触发类似棘轮的锁止机构让安全带紧急停转。表2中到达临界状态的转动角度可以为验证设计的锁止机构参数(表1所示)提供第一阶段数据。
5 结论
对卷收器加速到达临界状态(G点和C始终保持接触)进行了运动学建模,在详细分析GA杆各点加速度及受力情况基础上建立了到达临界状态的平衡方程;将该方程联立G 点的取矩方程,最终得到了分析到达临状态所需的仅含有“接触力_角加速度_时间”三参数的运动学方程,利用该方程进行matlab编程的数值计算,结果表明该卷收器锁止结构的设计参数符合到达临界状态所花费的加速时间要求。其得到的不同测试加速度条件下所耗费的加速时间与转动角度,可以为进一步分析非稳态变化的下一阶段运动学方程求解提供初始值。
猜你喜欢
机电工程技术(2023年1期)2023-02-24 05:21:20
机电工程技术(2022年10期)2022-11-27 10:36:58
纺织科学与工程学报(2022年4期)2022-11-22 07:03:10
河北省科学院学报(2020年1期)2020-05-25 06:57:18
中学生数理化·八年级物理人教版(2019年3期)2019-04-25 06:20:58
制造技术与机床(2018年11期)2018-11-23 01:07:50
疯狂英语·新读写(2017年1期)2017-04-06 03:52:31
纺织科学与工程学报(2017年1期)2017-02-25 07:06:57
小学生作文(低年级适用)(2017年12期)2017-02-06 01:24:09
汽车文摘(2015年11期)2015-12-02 03:02:52
