多技术融合在城市三维建模中的应用
2022-06-27 10:00杨晓玉王彦君王冬梅张怀亮
长春师范大学学报 2022年4期
杨晓玉,王彦君,王冬梅,张 伟,张怀亮
(合肥财经职业学院,安徽 合肥 231201)
随着数字城市、智慧城市的快速发展建设,出现了一种新型的智慧城市发展模式:数字孪生城市建设。数字孪生城市是在虚拟的网络空间里,再造一个与城市物理世界匹配、对应的城市,实现城市全要素虚拟化、数字化以及可视化[1]。数字孪生城市建设的重要空间基础设施之一是高仿真的城市三维模型。如何能快速、高质量、大面积地进行城市三维模型建设已成为数字孪生城市建设研究的热点之一。传统城市三维建模是利用大比例线划图、影像以及实地拍照,人工建模,这种方式效率低、周期长,人力成本高[2]。近年来,利用倾斜摄影测量自动进行城市三维建模也越来越多,但由于倾斜摄影拍摄有死角,导致建筑底部模型常有局部细节变形、纹理不清等问题。针对上述问题,提出了利用无人机倾斜摄影技术、车载激光雷达技术,结合全周期监理检查机制,多技术融合进行城市三维模型建设的方法,本文详细阐述了该方法的相关技术概述、技术路线以及三维建模的关键点,为其他城市开展相关工作提供技术参考。
1 相关技术概述
1.1 无人机倾斜摄影技术
无人机倾斜摄影技术是航测领域新兴起的技术,是在无人机平台上搭载相机,可在同一位置不同角度获取地面影像的技术。它具有如下几大特点:一是可获取高分辨率的垂直、倾斜影像;二是可从不同角度获得真实的地物侧面纹理信息;三是可使用软件进行自动三维建模;四是三维建模场景逼真,可准确进行地物定位和地物细部信息表达[3]。
1.2 车载激光雷达技术
车载激光雷达技术是地面移动测量技术的一种,它利用快速定位测量和近景摄影测量信息量大等优点,对地物进行激光扫描,获得地物的点云数据,并通过点云数据可以快速地进行三维模型建设。车载激光雷达技术具有如下几大特点:一是通过机动车搭载激光雷达扫描设备,对地物进行反复扫描,可获取目标地物大量点云数据[4];二是适合条形地物特征的目标快速扫描;三是在获得目标地物地理位置数据和点云数据的同时,还可以获得地物属性信息。
2 技术路线
利用多技术融合实现城市三维建模工作技术路线包括五个核心部分:前期准备、数据采集处理、三维模型建模、三维模型检查验收以及贯穿整个三维建模工作的全周期监理检测机制。技术路线如图1所示。

图1 技术路线图
(1)前期准备,无人机倾斜摄影测量和车载LiDAR扫描相关资料收集和整理,主要包括编写文档、航飞和车载LiDAR准备。编写文档包括工作技术、技术设计、作业要求和标准等内容;航飞准备包括航摄区、设备以及人员准备;车载LiDAR准备包括车辆、扫描设备以及人员。
(2)数据采集处理,主要包括两方面内容:一方面是无人机倾斜摄影;另一方面是车载LiDAR地面移动扫描。数据采集处理流程如下:一是无人机倾斜摄影航飞后获得数码影像、航迹线以及原始点云数据,车载LiDAR地面移动扫描获得车载路线以及点云数据;二是对无人机倾斜获取的点云数据、车载LiDAR获取的点云数据进行融合处理;三是进行空三加密和精度检查。
(3)城市三维建模,利用三维自动化建模软件对数据进行三维建模,形成城市三维实景模型,并对地物不清楚的纹理可利用车载LiDAR获取的纹理数据进行校对和融合,从而形成城市三维模型。
(4)城市三维模型检查验收,对建好的三维模型进行质量检查,合格后,形成最终的城市三维模型成果。
(5)全周期监理检测机制,在三维建模工作整个实施过程,引入了全周期的监理检查机制,保障城市三维模型建模工期和城市三维模型质量。
3 三维建模关键点
3.1 像控点布设
根据《低空数字航空摄影测量外业规范》要求,对像片控制点进行布点。点位布设应注意几方面内容:一是布设的范围需覆盖整个航飞区域;二是布设的点位需均匀分布;三是航摄范围线凹角转折处、凸角转折处需布设平高点。本文采用的无人机具有RTK高精度定位且小面积进行测图可以免像控,像片控制点布设密度可适当放宽,原则上相邻像片控制点间距不超过300米,具体布设点位应遵循道路分布情况。
3.2 点云处理
点云数据是对地物表面进行扫描获得的三维激光数据,主要包括两部分:一部分是通过无人机倾斜摄影获得;另一部分是通过车载LiDAR扫描获得,这样可以提高模型的精细程度。由于点云数据来自两部分且点云在不同位置反映的地物不同,需要对点云数据进行融合、处理和分类。点云数据融合处理主要采用去噪滤波的方法。当处理完毕后,会对点云数据自动分类,主要包括地面点云和非地面点云。自动分类后的点云数据在经过人工辨别后,对点云进行细分,最终获得点云数据成果。点云成果示意图如图2所示。

图2 点云成果示意图
3.3 空三加密
空三加密是倾斜摄影进行城市三维建模前的重要操作,其目的是将无序影像构建出一个与现实接近的空间模型。空三加密的主要步骤包括以下五步:第一,将POS数据作为参数,采用多层影像金字塔自动匹配的方法实现影像特征点的提取;第二,同名特征点进行自动匹配,获取影像连接点;第三,对影像控制点和影像连接点进行整体区域网光束法平差,从而计算出影像加密点;第四,进行影像外方位元素反算、多视角影像联合解算操作,确保平差精度;第五,空三加密完成。空三加密流程示意图如图3所示。

图3 空三加密流程示意图
3.4 三维模型自动建模
目前,利用倾斜摄影测量进行三维建模采用自动化建模,常用软件有ContextCapture(Smart3d)、大疆智图、PhotoScan以及Pix4D Mapper等[5]。本文利用ContextCapture软件进行三维自动化建模。三维建模主要包括六个步骤:一是利用影像范围确定建模的范围;二是生成密集点云,根据空三加密成果进行多视角影像密集匹配,从而获得高密度的点云数据;三是构建三维TIN网格,实现点云数据的三角网优化;四是根据三角形空间位置,自动化将映射最佳效果的影像作为模型纹理并贴图,从而形成三维模型初步成果;五是对模型中存在的问题进行修饰,如,模型变形、模型漏洞等;六是通过质量检查后,形成三维模型成果。三维模型自动建模流程示意图如图4所示,三维模型成果示意图如图5所示。

图4 三维模型自动建模流程示意图

图5 三维模型成果示意图
4 质量控制
4.1 全周期三维建模监理检查机制
城市三维建模工作任务紧、投资大以及周期短,为保障城市三维建模工作能保质保量完成,引入了全周期三维建模监理检查机制。具体流程:一是建立三维建模监理小组,编写三维建模监理实施方案;二是对三维建模过程中的基础工作、技术设计审查、无人机倾斜摄影、车载LiDAR扫描、外业核实、三维模型检查等工作进行全周期监理;三是形成项目监理报告,并提交给项目验收小组,作为项目验收材料。全周期三维建模监理检查流程如图6所示。

图6 全周期三维建模监理检查流程
4.2 三维模型质检
城市三维模型质检是三维建模工作中重要的一个步骤,直接关系最终三维模型的好坏。通过成立项目质检小组,对航飞、车载LiDAR扫描、到三维建模各道工序进行检查,如若发现质量不合格,不能开展下一阶段工作。城市三维模型质检包括车载LiDAR点云质检、航飞影像质检、空三加密质检、三维自动化建模质检、纹理质检以及三维模型成果质检[6]。三维模型成果检查内容示意表如表1所示。
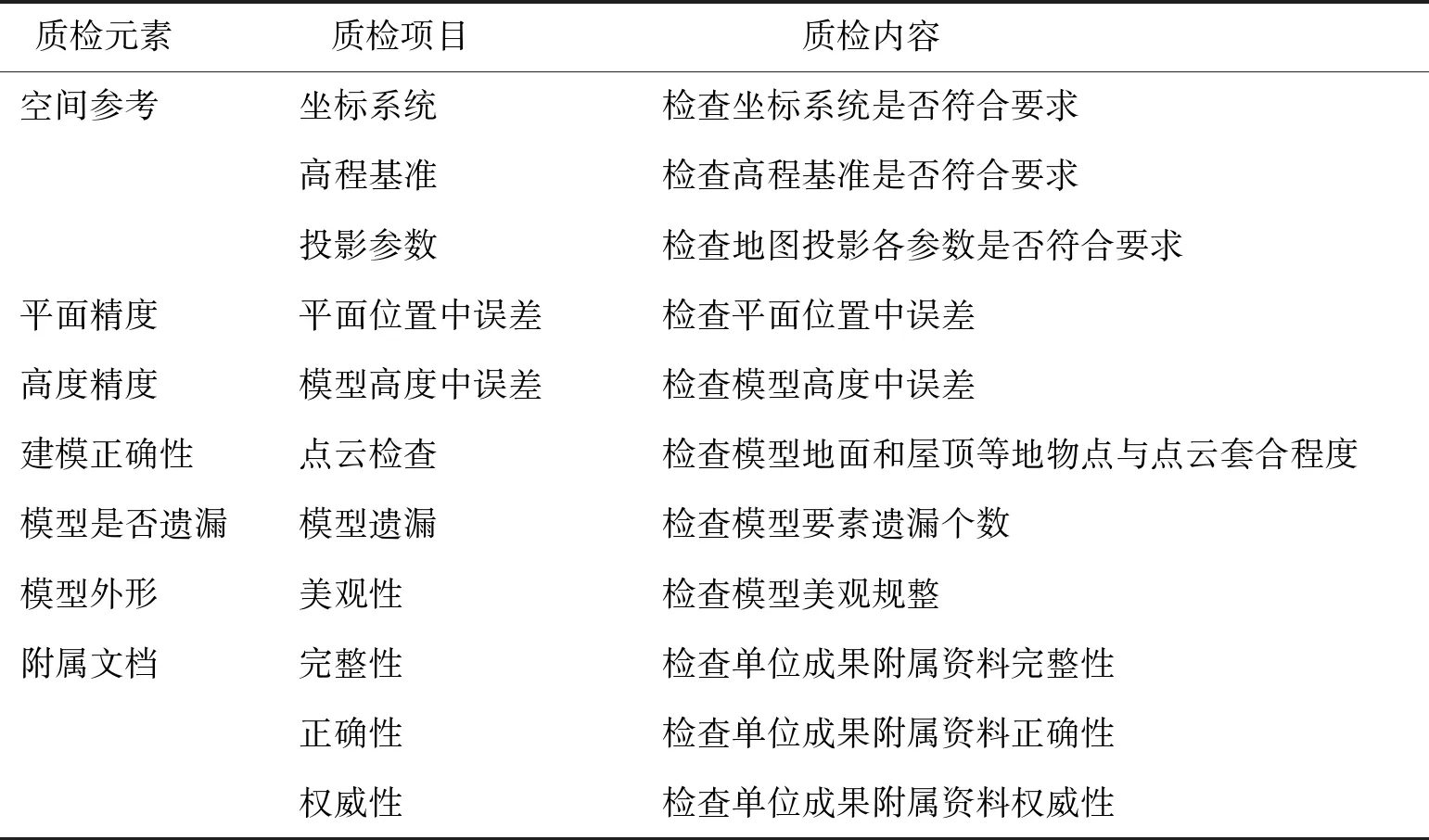
表1 三维模型成果检查内容
5 结语
本文研究了利用无人机倾斜摄影技术、车载激光雷达技术,结合全周期监理检查机制,多技术融合进行城市三维模型建设的方法,该三维模型成果较好地保证了与现实世界的拟真度,适合用于数字孪生城市建设的城市三维模型构建。但也存在一定的不足:一是需要航飞和车载扫描两次地物,且需要人工干预,三维建模成本增加;二是建模的周期较传统方式增加约30%,比直接利用倾斜摄影建模的周期长。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
消费导刊(2017年24期)2018-01-31
中国公共安全(2017年11期)2017-02-06
中国工程咨询(2017年10期)2017-01-31
现代防御技术(2014年6期)2014-02-28