雷达复杂环境下的群目标快速分辨方法
2022-06-27 01:33:22刘志栋李晓花汪润生黄晓兵张景东张荣斌
测控技术 2022年6期
刘志栋, 李晓花, 汪润生, 黄晓兵, 张景东, 张荣斌
(1.中国人民解放军63615部队,新疆 库尔勒 841001; 2.中国人民解放军63610部队,新疆 库尔勒 841001)
远程打击武器为了完成突防,在不同的阶段(助推段、末助推段、中段、再入段)会分离和释放出不同的物体[1]。尤其是弹道中段,远程打击武器目标的一个重要特征就是目标数量不再单一,而是形成包括战斗部、碎片和各种诱饵的目标群,它们以大致相同的速度沿远程打击武器的预定弹道惯性飞行,构成复杂的群目标环境[2]。群目标回波密集,相对速度小,回波信号幅度起伏大,检测困难。
因此需要对群目标分辨技术进行进一步分析研究,以提升雷达对弹道群目标的及早分辨能力,为导弹预警系统提供更加及时准确的引导信息,达到快速发现拦截摧毁目标的目的。
对目标进行单、群目标识别,是实现多目标快速检测的前提。大多数雷达采用距离分辨或角度分辨的方法进行多目标判断。近年来,基于背景熵的背景平稳度评估方法逐渐发展成熟并成功应用于工程实践。
CFAR(Constant False Alarm Rate,恒虚警率)算法能够有效控制虚警率,在雷达目标检测中作用巨大。采用OS(Order Statistic,有序统计)类CFAR检测法,雷达对相距较近的多目标具有良好的分辨能力,可有效减小多目标环境下的遮蔽效应。经过多年的发展,出现了很多具有代表性的OS-CFAR算法,它们都在提高雷达分辨力方面起到了良好的作用[3]。
对于遮蔽小目标的检测,多采用先强后弱的步骤,首先对强目标进行消除处理,然后再对小目标进行检测,在强目标参数估计和消除方法上存在一定差异。
1 跟踪信号带宽对多目标分辨的影响
假设雷达跟踪信号带宽为5 MHz,距离单元间距为30 m,此时雷达对群目标的最小分辨距离为30 m。为了进一步提升雷达对群目标的分辨能力,在跟踪目标时采用40 MHz信号带宽,雷达距离单元间距则减小为3.75 m。假定弹道群目标的相对速度为10 m/s,增加跟踪信号带宽后的雷达可以提前2.625 s实现对群目标的分辨。
因此,增加雷达跟踪信号带宽可以提高雷达的距离分辨能力,缩短雷达对关键目标的捕获时长。
2 基于背景熵的群目标判断
对群目标检测若采用噪声恒虚警,则会将碎片等构成的扩展目标检出,导致虚警率上升;若采用杂波恒虚警,由于远程打击武器目标群内目标间相距较近,背景估值偏离噪声电平,导致弱小目标丢失,检测概率下降[4]。为保证达到检测指标要求,利用背景熵信息进行群目标判决选择检测,在多目标环境下通过背景滤波技术实现邻近目标检测。
基于背景熵的背景平稳度评估方法处理流程包括提取参考单元幅度分布、计算幅度分布的香农信息熵。熵值小于指定门限时为群目标环境,否则为单目标环境。设CFAR采用左右各16点作为参考单元,在统计背景熵时采用20维的直方图。取16点幅值最大值vmax,计算幅值对应在直方图中的位置为
nBin=[20v/vmax]
(1)
式中:v为参考单元的幅度值。从而建立起背景幅度分布直方图计算背景熵:

(2)
将背景熵与指定限进行比较。如图1和图2所示,当参考单元不包含目标时熵值较大,当参考单元含有目标时熵值较小。因此,可以通过计算参考单元的背景熵判断目标是否处在群目标环境。
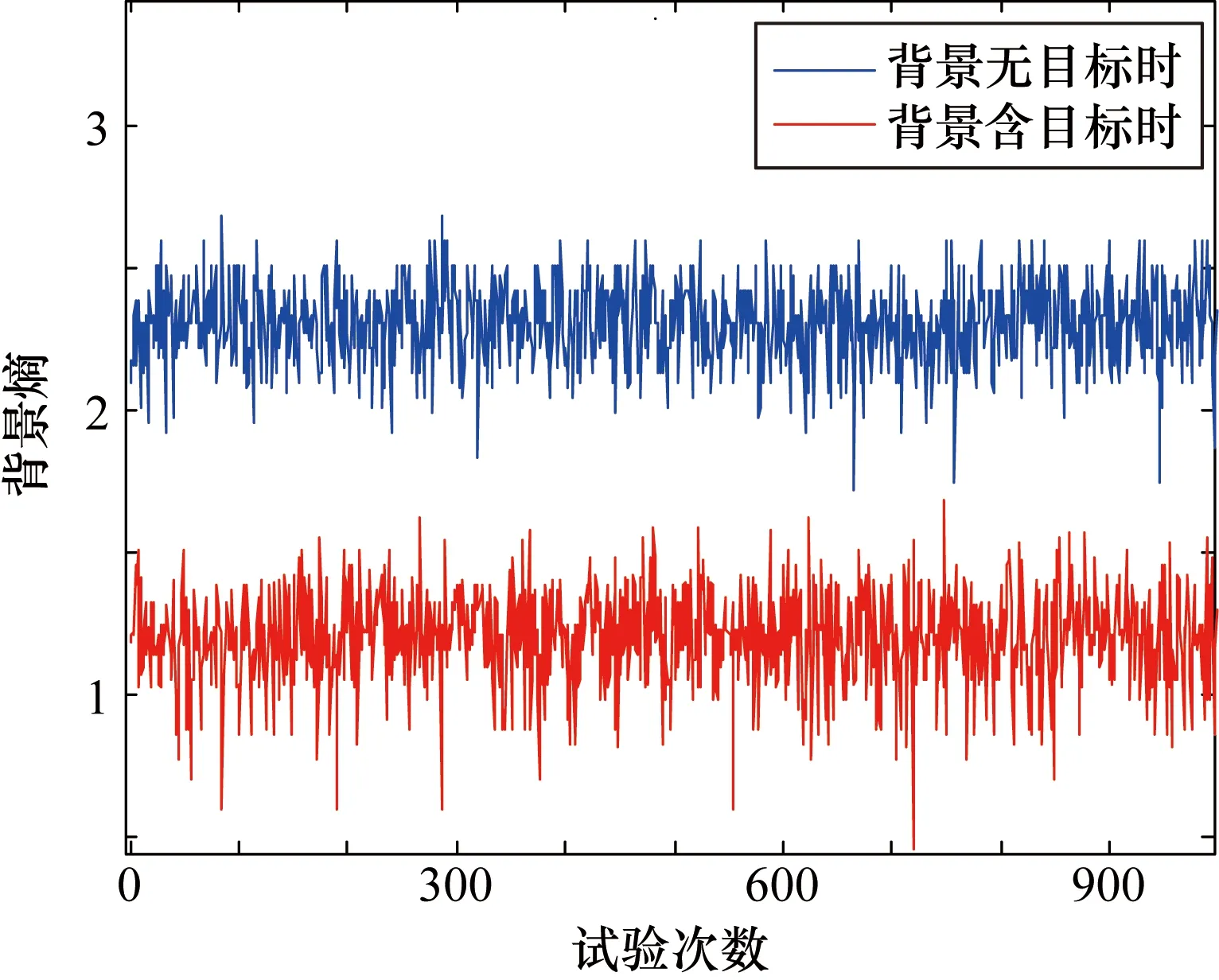
图1 背景无目标与含目标时的背景熵
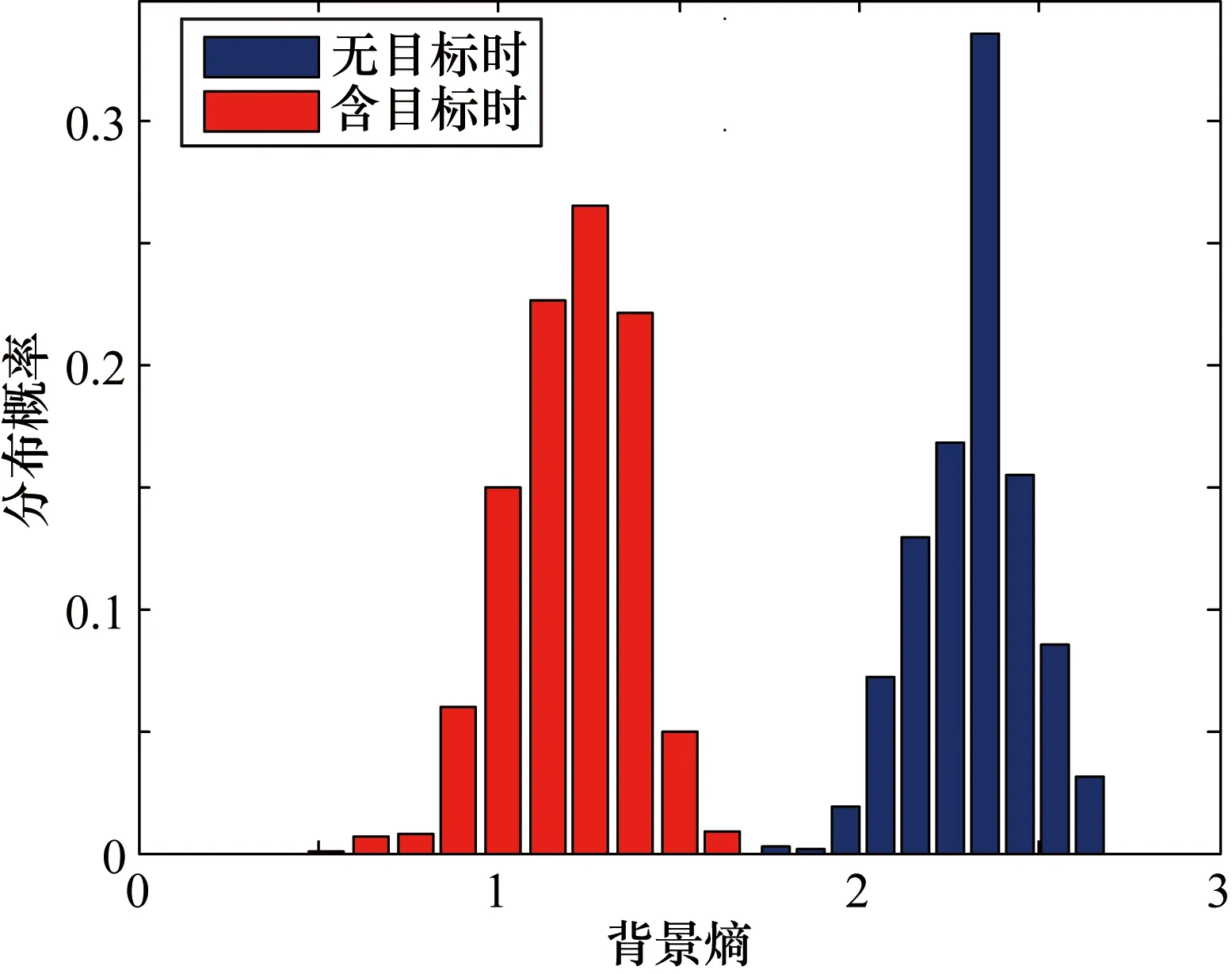
图2 背景无目标与含目标的背景熵分布
基于背景熵滤波的单目标和群目标检测流程框图如图3所示。
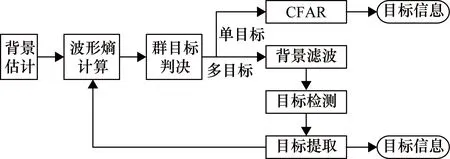
图3 群目标检测流程图
检测步骤如下:
① 利用基于背景熵的背景平稳度评估方法,判断是否处于群目标环境。
② 当不存在多目标环境,可采用恒虚警检测技术实现对目标的检测。
③ 存在多目标环境时,利用背景滤波获得稳定背景后进行阈值计算,并对目标进行检测,检测出目标后利用二次迭代法进行二次检测,然后进行下一距离单元的检测。
④ 利用雷达的实测数据进行群目标检测分析,通过特定的门限设计,得到的单目标与群目标识别的准确率达到99%。
3 基于OS-CFAR的群目标检测
对群目标检测若采用噪声恒虚警,则会将碎片等构成的扩展目标检出,导致虚警率上升;若采用杂波恒虚警,由于远程打击武器目标群内目标间相距较近,背景估值偏离噪声电平,导致弱小目标丢失,检测概率下降。为保证达到检测指标要求,采用OS-CFAR进行群目标检测。
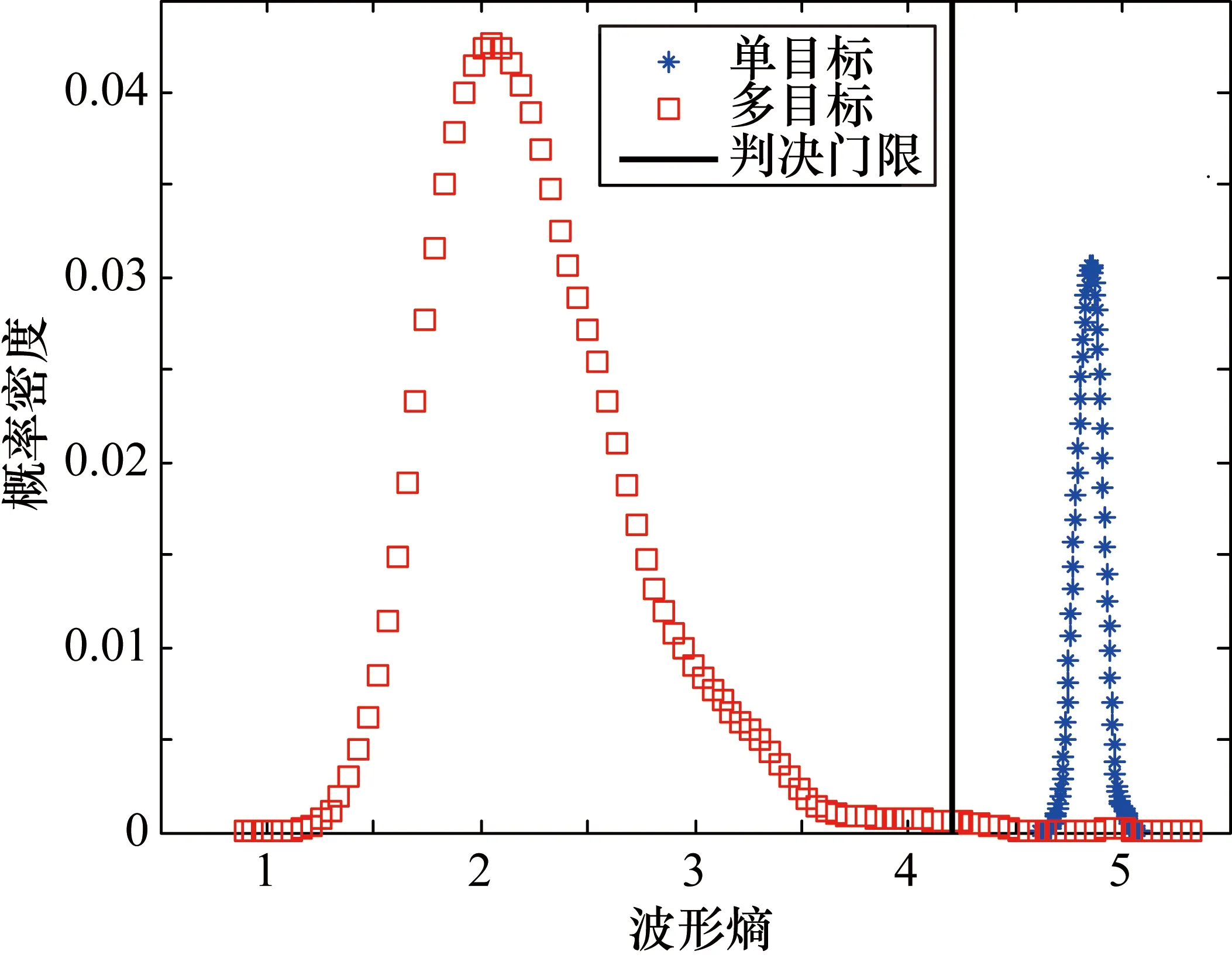
图4 群目标的正确判定
OS-CFAR检测器的结构如图5所示,其中D为检测单元样本,xi(i=1,2,…,R)为参考单元样本,R为参考单元数。
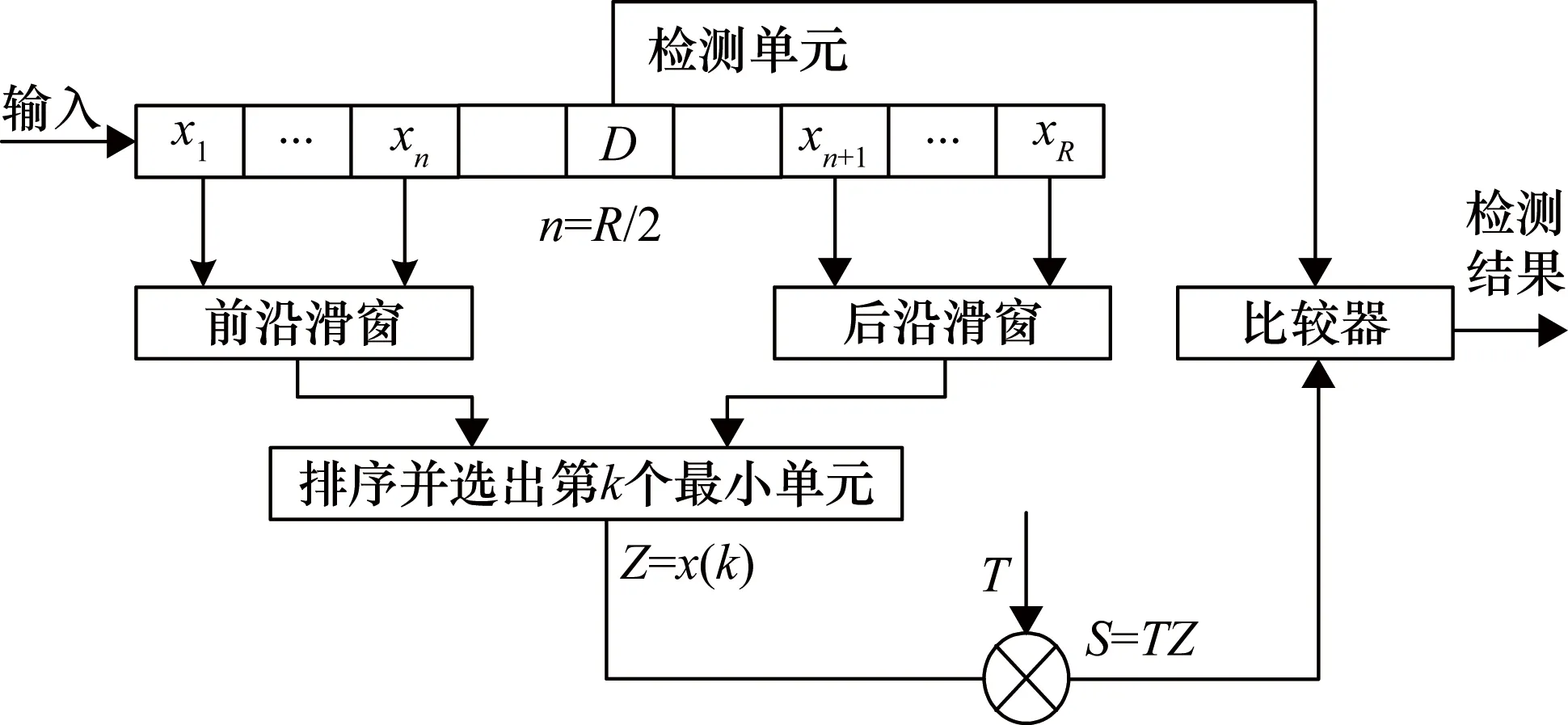
图5 OS-CFAR检测器方框图
OS-CFAR检测器首先对参考单元样本按大小做排序处理[5],有
x(1)≤x(2)≤…≤x(R)
(3)
然后取第k个排序样本x(k)作为检测器对杂波功率水平的估计Z,即
Z=x(k)
(4)
则Z是一个随机变量,在均匀杂波背景中其概率密度函数为
(5)
假设接收机噪声和背景杂波服从高斯分布[6],经过平方律检波器后,参考单元采样xi服从指数分布,其概率密度函数和分布函数为[7]
(6)
(7)
式中:
(8)
其中:μ为噪声功率水平;λ为信号与噪声平均功率的比值;H0为不存在目标的假设;H1为存在目标的假设。
从上面式(5)~式(8)可得
(9)
则OS-CFAR检测器在均匀杂波背景中的检测概率和虚警概率分别为
(10)
(11)
当跟踪波束内出现密集群目标时,采用常规恒虚警检测大信噪比目标往往遮蔽小信噪比目标,使小信噪比目标出现漏检,而采用本文的检测方法能够提升小目标的检测概率。图6为当大目标信噪比为37.3 dB时,小目标信噪比从12~21 dB时的检测概率。可以看出,小目标信噪比为17.3 dB时,常规CFAR处理只有0.16的检测概率,而采用OS-CFAR处理,检测概率可达0.95。
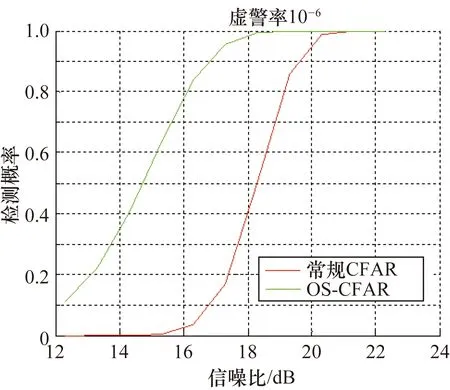
图6 群目标检测概率
图7为运载器一级分离时的雷达测量数据,图8为运载器二级分离时的雷达测量数据,两图中点状点迹是常规恒虚警检测结果,圈状点迹是OS-CFAR检测结果。从图中可以明显看出常规检测方法漏检严重,而OS-CFAR检测稳定连续。
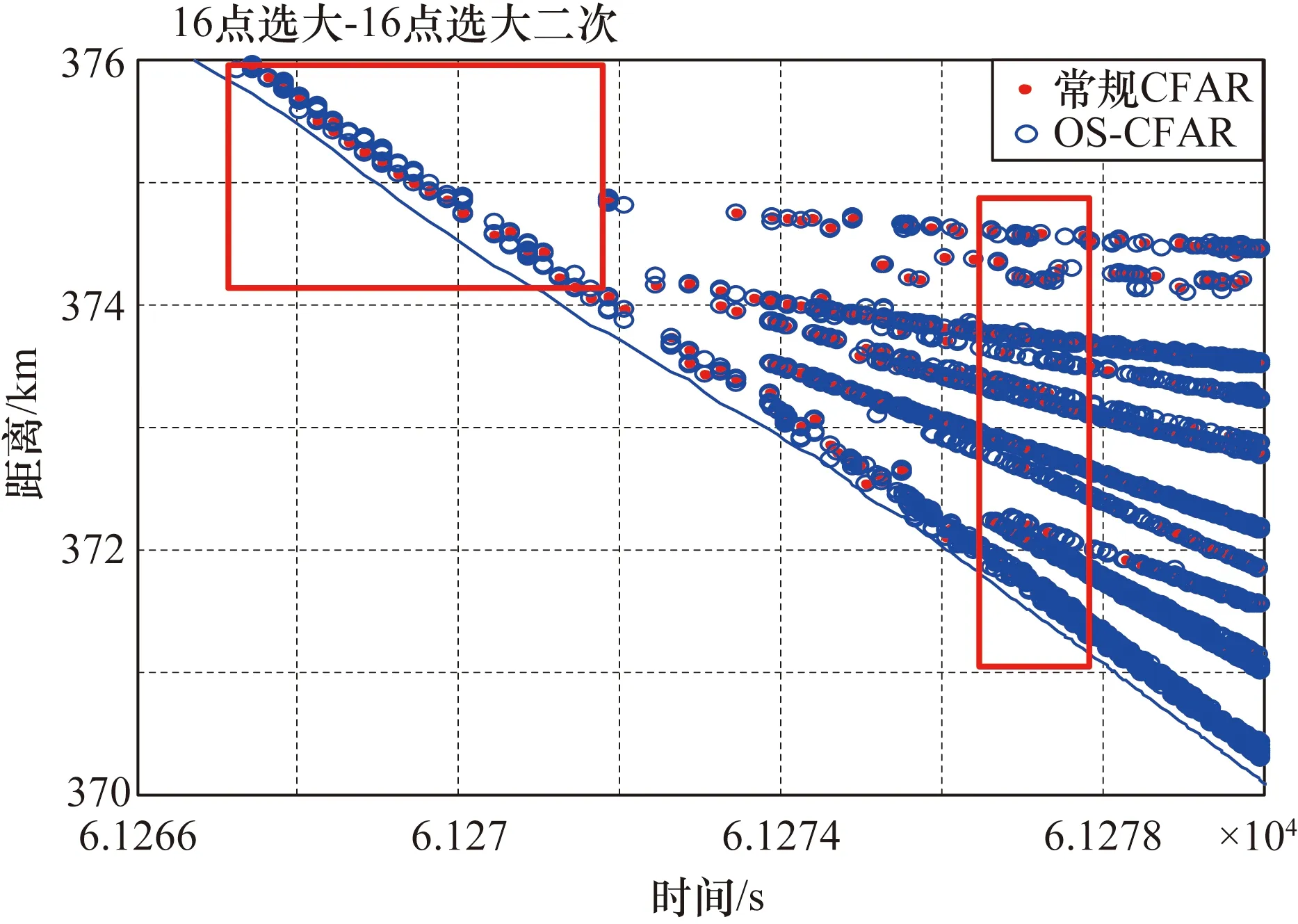
图7 一级分离时OS-CFAR的群目标检测效果
4 基于Clean算法的遮蔽目标检测技术
高速高机动的战斗部和运载器分离过程中,由于运载器比战斗部幅度强10~30 dB,会出现大小目标遮蔽的场景,导致从距离和多普勒维都难以及时地判断其分离状态[8],常规的处理无法检测到被运载器遮蔽的战斗部目标,如图9所示。
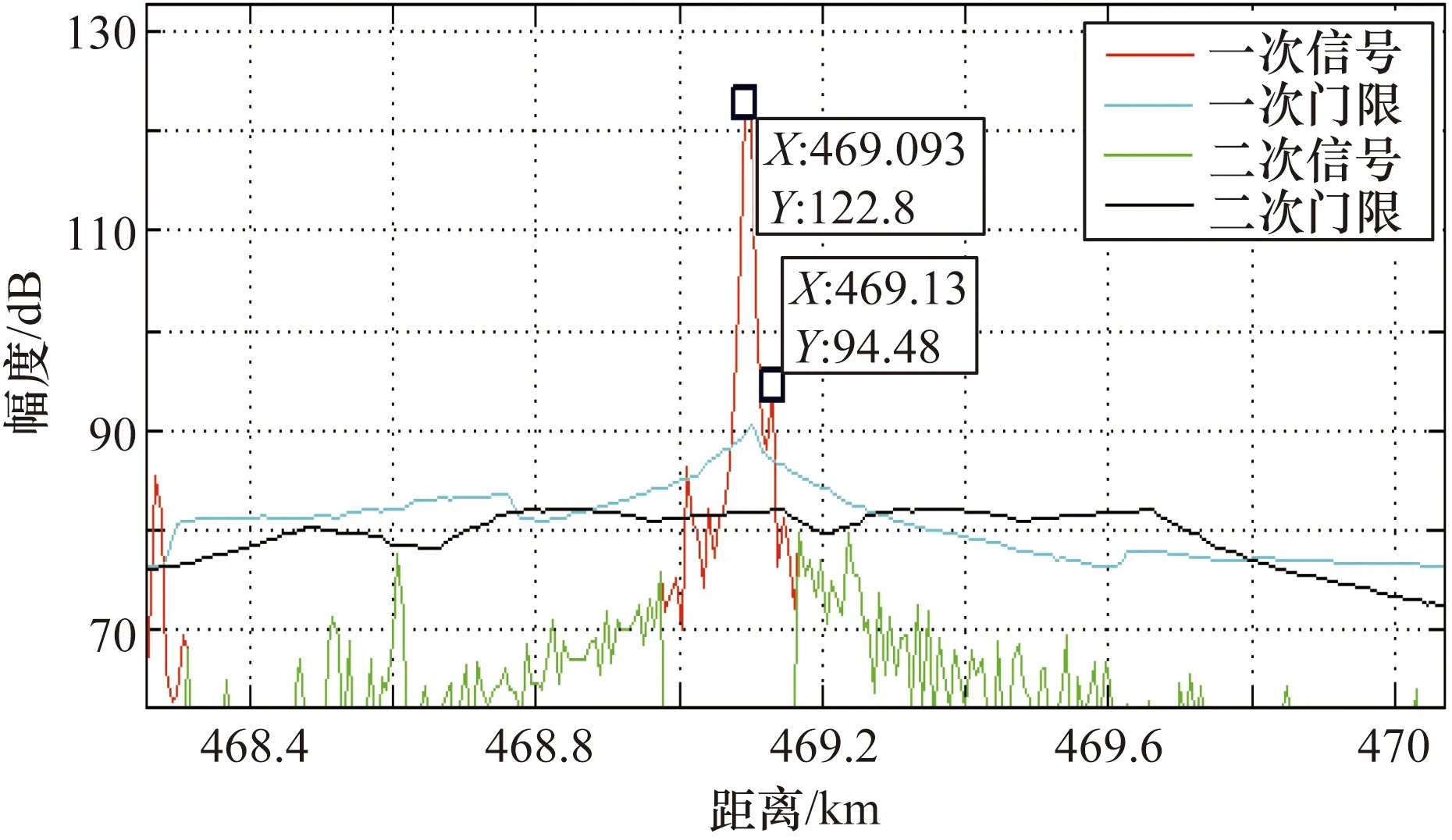
图9 大小目标遮蔽问题样机处理结果
针对该难题,可采用基于多通道联合处理和时频二维分辨的方法进行分离时刻监测。在战斗部与运载器发射后的初始阶段,雷达在常规工作模式下进行目标搜索截获,在搜索截获过程中采用多通道联合处理进行大小目标遮蔽条件下的群目标检测,在稳定跟踪后采用PD模式对目标进行时频二维分辨和跟踪。
对于常规跟踪模式,基于战斗部和运载器在空间角度上存在一定的差异性的特点,利用和波束和差波束进行联合处理,在检测到大目标之后对大目标进行自适应对消,实现对大目标的Clean处理,在大目标用Clean处理后进行小目标检测,从而可以较好地缓解大小目标遮蔽问题[9]。其具体实现过程如图10所示。
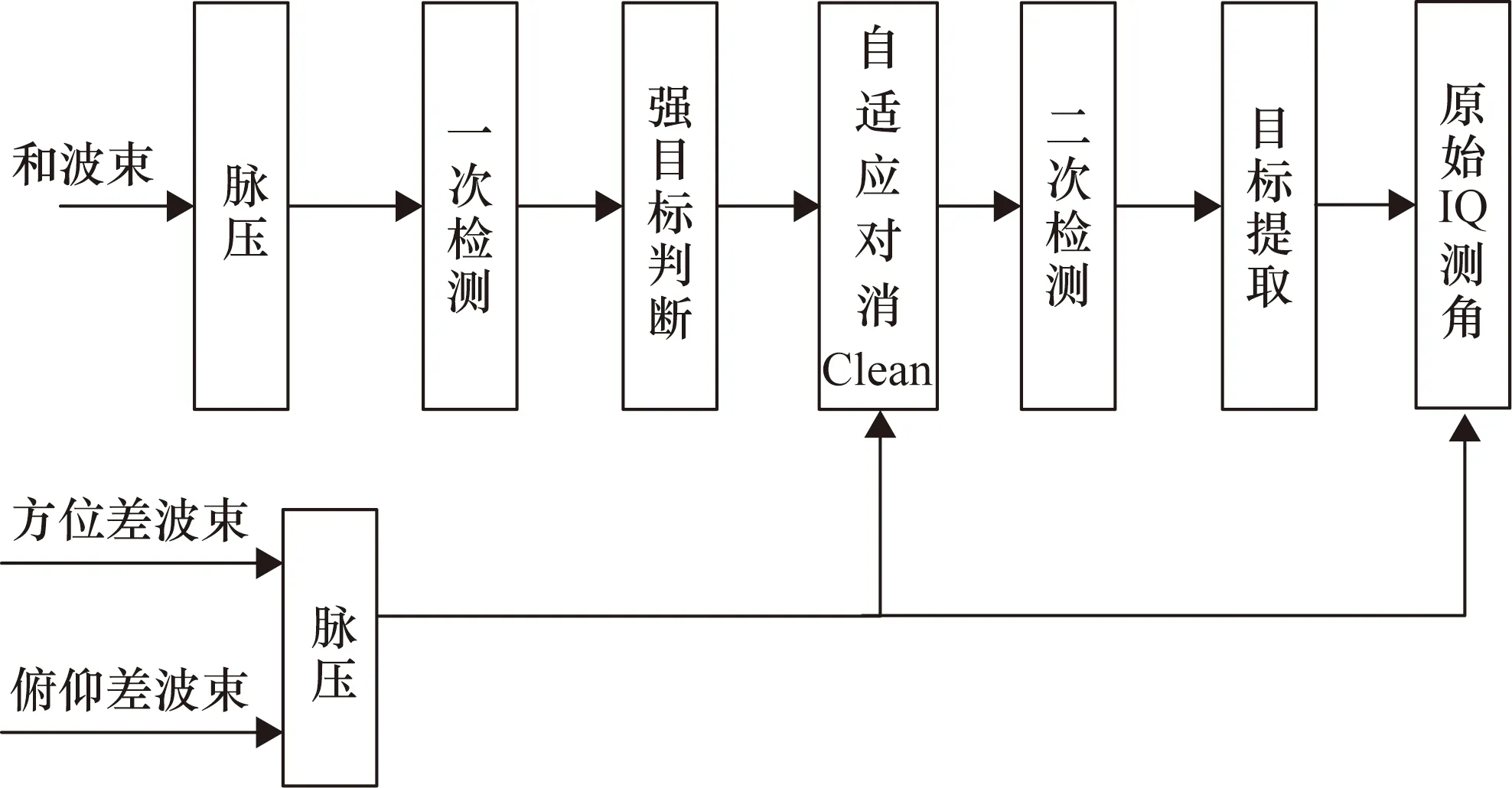
图10 常规模式下二次检测处理流程
目标检测步骤如下:
① 根据和波束的脉压信息,对其进行一次检测,对检测到的目标进行判定,如果出现强目标则执行步骤②。
② 提取和波束强目标对应的距离刻度,找到对应的方位差波束和俯仰差波束,并提取差波束中对应的较大值。
③ 采用自适应对消Clean算法,用和波束上强目标对应的数据减去步骤②中提取的差波束值,得到一组新的数据。
④ 对新数据做二次检测,提取相应的目标。
在稳定跟踪后采用PD模式对目标进行时频二维分辨和跟踪,采用插值的方式实现多普勒维的分辨。
如图11所示,当目标距离较近时可以实现大目标的Clean处理和弱小目标的检测,将目标分辨从40~50 m降低到10~14 m,较好地解决了大小目标遮蔽下的目标检测问题。

图11 Clean处理前后对比
图12为凝聚后点迹的比较,在大小目标相距10~14 m时常规处理已经无法分辨两个目标,而新算法能够稳定地实现两目标的分辨。
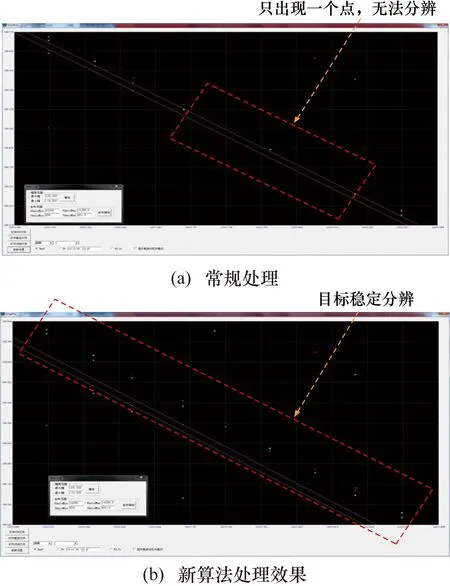
图12 点迹对比
时频二维联合分辨试验结果如图13所示,采用64脉冲的PD模式,带宽10 MHz,运载器和战斗部在距离3 m、速度3 m/s时可实现分离状态检测。
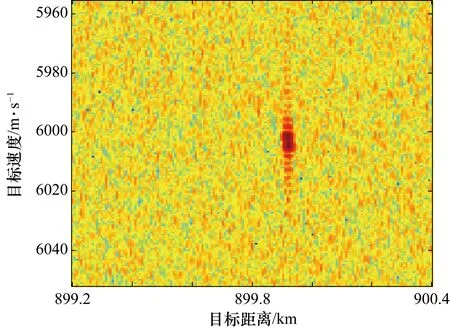
图13 PD模式下的时频分析
5 结束语
本文通过提高雷达跟踪信号带宽,可以有效减小雷达分辨距离,提高雷达对目标的尽早发现能力。利用基于背景熵的背景平稳度评估方法能够有效提高其对单(群)目标的检出概率,为雷达目标进一步检测提供策略依据。当跟踪波位内出现密集群目标时,采用常规恒虚警检测大信噪比目标往往会遮蔽小信噪比目标,使小信噪比目标出现漏检,而采用本文的OS-CFAR算法能够有效提升小目标的检测概率。所述自适应对消Clean算法可对目标进行时频二维分辨和跟踪,可以较好地解决大小目标遮蔽下的目标检测问题,在常规处理已经无法分辨时实现近距离大小目标的分辨。
猜你喜欢
兵工学报(2022年11期)2022-12-01 12:52:12
物联网技术(2019年9期)2019-11-06 06:24:49
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
科学与财富(2017年24期)2017-09-06 09:52:35
设备管理与维修(2017年1期)2017-04-11 03:21:42
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24
舰船科学技术(2015年8期)2015-02-27 15:38:48
电测与仪表(2014年17期)2014-04-04 11:56:48