
管道除尘机器人结构设计
2022-06-26 14:10:52于家骅徐菁张亚茹邢一童赵文轩
科教创新与实践 2022年8期
于家骅?徐菁?张亚茹?邢一童?赵文轩

摘要:管道除尘机器人,旨在制造一个更加方便、高效的管道除尘机器人,用来解决该领域内专业除尘设备的不足。为了进一步解决管道除尘机器人在管道内单一的工作问题,同时为了提高管道除尘机器人在管道内的工作效率,所以我们研发了一种新的履带式的管道除尘机器人。基于管道除尘机器人的机械原理要求,对管道机器人的履带式行走机构、动力驱动机构、传动机构以及辅助机构进行设计,最后在三维建模软件SolidWorks内对管道除尘机器人的各个零件进行建模和整体装配,建立除尘机器人的三维模型。
关键词:管道除尘机器人;履带式行走机构
1.引言
随着我国天然气、空调等的广泛应用 ,管道的运用越来越广泛,管道由于长时间的应用,在运输过程中,多少都会积累灰尘,而由于管道狭小,多设在地下或高处,大大的增加了清洁与维护管道的难度。目前在国内,管道除尘的方法普遍存在很多局限性,并且大多数不符合环保,并且技术性、经济性要求,除尘效果非常不理想。而且人工在进行管道除尘、检测时困难重重, 不仅效率非常低而且还存在着一定的安全隐患。而用管道除尘机器人在管道内进行除尘工作时还有着其他管道除尘方式不可替代的优点, 管道除尘机器人不仅可以在管道内进行除尘工作, 还可以实时地检查除尘效果以及进行对管道的检测、喷涂、消毒等工作。而且目前市场上国产的管道除尘机器人产品大多、太杂。技术性能比较单一, 产品仓促投放中国市场, 不利于我国国内管道除尘市场的健康发展。该管道除尘机器人采用了3个履带行走机构,可以與管道内壁紧紧贴合。而且根据管道截面形状使履带360°贴合管道, 有利于增大履带与管道壁面的附着力和摩擦力。
2.总体设计
2.1机器人工作原理
机器人在水平管道中运行时,履带行走机构的履带可以与管道的内壁接触,管道内壁与履带之间的贴合,产生的摩擦力可以为管道除尘机器人提供动力。水平管道中运行的机器人,只需要履带与管道内壁接触,就可以使机器人正常行走。机器人在竖直管道内运行时,要使管道除尘机器人的本体中心线与管道的中心轴线保持平行。设计管道机器人的3个履带行走机构以360°抵在管道内壁。使履带可以紧紧地贴合在管道内壁,防止机器人滑落,还可以为管道除尘机器人的向上运动提供足够的摩擦力。机器人在进入管道后,3个履带开始运动,同时位于后方的的摄像头打开,前方的除尘机构开始转动,进行除尘工作。
2.2总体设计思路
为了使管道除尘机器人具有全方位的运动,设计采用了模块化的设计思想,总体结构由动力驱动机构、传动机构、行走机构、除尘机构、辅助机构所组成。
动力驱动机构:机器人有三种驱动方式:液压驱动、气动驱动和电动驱动,对这三种基本方式进行分析比较,确定了管道除尘机器人的驱动方式。液压驱动气动驱动不仅对环境要求比较高,而且实现起来比较复杂,但电机驱动的结构相对简单,比较容易实现密封和调速控制,所以在本设计中选用了步进电机驱动作为管道除尘机器人本体的驱动装置。
传动机构:传动机构是将原动机的运动和动力进行传递和分配作用,是机器人非常重要的组成部分,通过分析常用的带传动、齿轮传动、链传动及蜗轮蜗杆传动的特点,结合除法机器人的组成特征,确定传动机构的构成由蜗轮蜗杆传动、链传动等组成。
行走机构:行走进机构是此机器人行走的关键,现有机器人的移动方式主要有蠕动爬行、弹性振动走、履带行进、车轮式和腿足式。其中车轮式、腿足式和履带行进3种移动方式结构相对简单且较容易实现。车轮式的行走机构结构简单,移动速度快,控制转向比较方便,运动过程中能量的利用利率较高,但是着地面积小,转弯半径小,越障能力一般,爬坡能力弱; 腿足式自适应能力强,越障能力强,对粗糙路面吸附性能好,但移动是间歇的,运动不连贯,速度慢,结构复杂,步态难于控制。由于履带式行进机构有支撑面积大,越障能力强,清扫时不易抖动,转向半径极小,可以实现原地转向等特点。基于履带式行进机构以上特点都较符合管道内行走要求,所以本机器人采用的是履带行走机构。
除尘机构:管道除尘机器人是用毛刷、气锤、气管等机械搅动装置将黏附在管道内壁上的灰尘剥离, 然后再利用大功率的吸尘器把灰尘吸走用来达到清理管道的目的。其中毛刷的样式有矩形管毛刷和圆管毛刷。有的产品还采用吸尘器方式, 吸尘器形式的管道除尘机器人和生活中家用的吸尘器相似, 单单依靠空气泵产生的负压将灰尘吸入,需要用到一根很长的管子, 把灰尘吸到管道外面,再进行清理工作。本产品采用了毛刷除尘,使毛刷的轴线与管道除尘机器人的行进方向一致, 毛刷直径大小与管道直径相配。毛刷有利于快速清除灰尘,效率高。
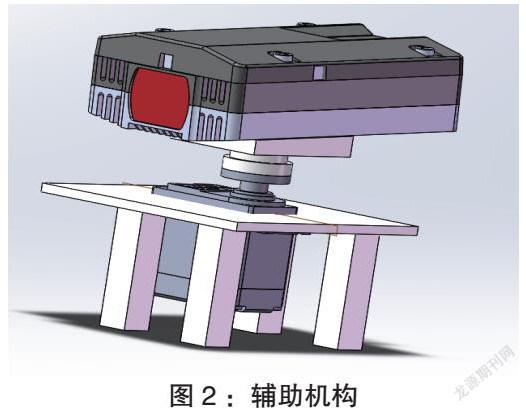
辅助机构:管道除尘机器人在黑暗的管道环境工作, 必须要安装必要辅助照明装备。有一些管道除尘机器人使用的是卤素灯进行照明, 虽然卤素灯的优点是亮度很高, 但它也存在着使命寿命短、发热量大等缺点。因此本产品采用的是高清摄像头,不仅可以在黑暗中清楚的看到管内的状况,而且没有上述所说的缺点。
3.履带行走构设计
与传统的履带行走机构不同,该履带行走机构没有直接与管道机器人本体相连接,而是通过履带固定结构与本体间接相连,一方面是机器人变径结构的一部分,另一方面是管道除尘机器人的行走机构。使得管道机器人在运动的过程中实现轻松变径,让机器人的变径与行走变得更加灵活。
履带行走机构中的履带采用的是橡胶履带,因为材料的原因,在管道除尘机器人的行走过程中,橡胶履带比其他履带有着更大的摩擦力,尤其是管道机器人行走在有些倾斜角或者竖直管道内的时侯,橡胶材料的履带产生的摩擦效果会比其他履带的摩擦效果更显著。履带行走机构与管道内壁的接触面积更大,可以为管道除尘机器人的运动提供更大的摩擦力,提高管道机器人的行走能力。因为履带的整体结构比较笨重,需要一定的转弯半径,所以在制作履带过程中采用的是轻质材料组装管道除尘机器人的履带行走机构。
4.除尘机构设计
除尘模块是管道除尘机器人完成除尘工作任务的核心,是关键技术研究内容,本机器人除尘采用的是毛刷清理,由3个毛刷组成,以360°分布在机器人的前侧。通过除尘机构旋转,达到清理的效果。在面对不同的管道时,可采用不同直径的毛刷。而且当需要清扫哪一类管道时, 只需要换上符合该类管道的毛刷即可, 而不需要更换毛刷的传动箱体, 大大方便了操作。
5.辅助机构设计
由于管道的长期使用,会有一些污垢的沉积,而且管道的直径比较小,使得管道能见度较差,甚至根本就看不见管道内的情况,很容易会产生一些不必要的麻烦。为此必须给管道机器人配备照明和视频采集装备,采集到的视频图像通过通讯线传回地面监视系统,以便于地面人员实时对管道情况进行观察、分析,从而预防意外事件的发生。本产品机器人装有小型照明摄像头,小型摄像头装在机器人后方,可以更好的观测管道内的情况,方便工作人员从地面上对管道情况进行观察、分析。视频采集摄像头用来采集管道污垢的堆积与除尘后的情况,和机器人的前进路径和周边环境,据此地面工作人员可以更好地对管道环境进行周详的分析,从而更好更快地进行除尘维护工作。
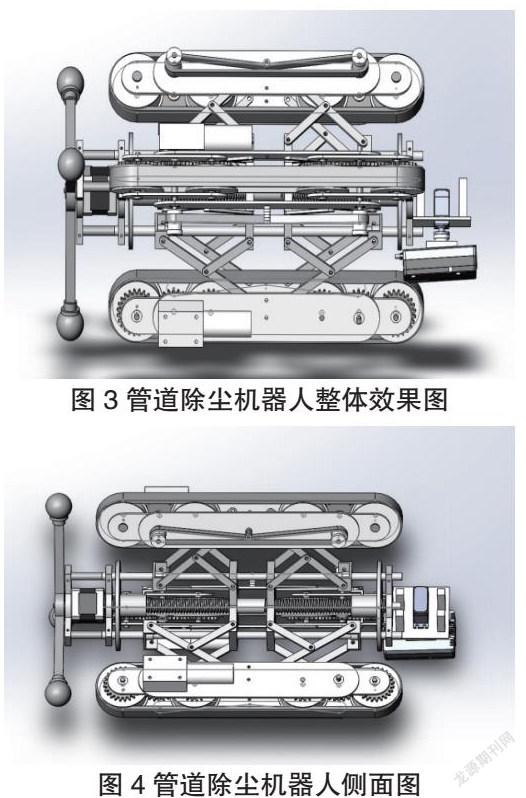
6.管道机器人的整体装配
我们在对于新型的管道除尘机器人的设计过程中,采用的是以本体为中心向周围扩散的装配方法,首先要对管道除尘机器人的各种机械零件和装配结构进行分析。用SolidWorks三维建模软件完成对管道除尘机器人的全部零件的设计和建模,并且通过对管道除尘机器人的各个零件进行了合理的配合,然后组装成了整体机器人的装配体。如图所示:
7.结论
该管道除尘机器人可以应用在各种复杂的管道内,还可以更加高效的完成管道内的除尘的工作,本文采用履带式结构,增大了与管道内壁的接触面积,提高了摩擦力,而且还提高了驱动能力和负载能力,可以牢牢的抓住管道内壁。该机器人采用了三维建模软件Solid Works对机器人的各个零件进行设计、建模和装配,直观地体现出变径管道机器人的整体情况。在管道内具有更好的实用性。
参考文献:
[1]毛立民. 通风除尘管道清洗机器人的开发. 东华大学机械工程学院,2005-12-30.
[2]常生,刘玉良,王忠超. 新型变径管道机器人的设计. 浙江海洋大学,2021-11-10.
[3]刘勇. 可变径管道机器人结构及控制系统设计. 上海理工大学,2022-02-24.
基金項目:2021年山东省大学生创新训练项目(S202113320092);
2020年青岛黄海学院科技创新活动项目;
2021年国家大学生创新创业训练计划项目.
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
中国石油石化(2021年8期)2021-03-30 12:39:14
文物季刊(2021年1期)2021-03-23 08:12:58
南方农机(2021年1期)2021-01-20 11:41:46
港口装卸(2020年3期)2020-06-30 10:37:54
石油化工建设(2019年6期)2020-01-16 08:03:42
中国临床医学影像杂志(2019年5期)2019-01-07 22:21:27
制造技术与机床(2017年10期)2017-11-28 05:24:04
焊接(2016年1期)2016-02-27 12:54:45
