无人机倾斜摄影测量在农村房地一体测量中的应用探索
2022-06-24 14:50:38孙诗友
四川建材 2022年6期
孙诗友
(中国建筑材料工业地质勘查中心四川总队,四川 成都 610052)
0 前 言
社会主义新农村建设进程的不断加快,使得保障广大农民权益成为一项重要工作,而农村房地一体化调查不但是惠民政策,而且是国家掌握农民住宅的主要途径,是编制新农村发展规划的数据来源。为此,有必要确保农村房地一体化测量成果的准确性。在实际测量工作的开展中,可以对先进的无人机倾斜摄影测量技术加以合理应用。
1 无人机倾斜摄影测量关键技术
1.1 测量系统的构成
倾斜摄影测量系统由两个部分构成,分别为影像获取设备、数据处理软件。在该系统中,影像获取设备是核心,包括无人机、航向规划软件以及摄影相机等。
1.2 测量原理
当倾斜摄影测量系统中搭载的相机为5镜头相机,无人机的飞行方式为S形,此时测量系统可同时拍摄周围四个方向以及垂直方向的影像;系统搭载单镜头相机时,无人机的飞行方式为井字形,镜头垂直形下拍摄正摄影像,镜头在云台的控制下,角度会偏斜,无人机沿着规划的轨迹飞行两遍,可获取四组倾斜影像。当某个地物的影像同时出现在三张以上的照片中时,计算机通过识别,并利用相应的方法,便可获取到拍摄物体的三维坐标。倾斜摄影测量系统采用的是3D建模的方法,常用的有两种,分别为Lidar数据结合影像、完全依托倾斜影像[1]。
1.3 影像密集匹配
在倾斜摄影测量中,多视影像的密集匹配是技术核心。从多视影像的特点来看,它的分辨率较高,影像重叠度大,由此容易引起数据冗余问题。倾斜摄影相机是通过无人机搭载,因无人机本身飞行的高度偏低,加之飞行过程中受到风的阻力影响,稳定性一般,所以会导致拍摄到的影像具有明显的重叠度变化,增大了多视影像同名点的获取难度。为了能够在多视影像当中以较快的速度找到同名点,恢复被拍摄物体的三维信息,便需要进行密集匹配。
1.4 TIN三角网
数字地表模型(DSM)按子域可划分为以下两类:一类是规则方形格网(RSG),另一类是不规则三角网(TIN)。前者虽然结构较为简单,并且构建过程比较容易,但由于不具备拓扑功能,从而导致数据量大,会出现冗余问题,特别是在平坦区域,这种情况的发生几率较高;后者有拓扑结构,数据量小,表达细致,在一些地势不平坦的区域优势明显[2]。多视影像匹配时,不可避免会产生出诸多点和线元素,其中的点元素可用TIN构建网络,而线元素可作为约束条件,参与到TIN的构建中。在对TIN构建时,可基于Smart3D软件,具体方法如下:利用对角线交换法,将通过密集匹配得到的线元素作为约束条件,借助局部最优,对TIN中每条的线段进行调整,以此来形成具备约束的TIN网。
1.5 纹理映射
从本质的角度上讲,纹理映射是将倾斜摄影系统拍摄的物体影像经处理后,所生成的具有纹理特征的图像,依托数学关系,建立与空间点对应的关系,将具备纹理特征的图像贴附在3D模型上,便可形成视觉效果逼真的模型[3]。按照映射方向的不同,可将纹理映射分为正向和反向两种情况。
正向映射是以映射函数为依托,对2D纹理坐标进行转换,使其变为3D纹理坐标,并贴到模型表面,函数表达式如下:
F:(u,v)→(x,y)=(k(u,v),1(u,v))
(1)
式中,F为正向映射函数;(x,y)为屏幕坐标;(u,v)为纹理坐标。
反向映射的方向是从屏幕到纹理空间,它是纹理映射中应用较为广泛的方法,数学关系式如下:
F-1(x,y)→(u,v)=(h(x,y),g(x,y))
(2)
反射映射需要对每个像素依次求解,由此避免多图像不连续的情况,基本上不会产生出数据冗余问题。Smart3D软件能够自动实现纹理映射,具体过程如下:通过空三解算,生成点云数据,根据设定好的优先级构建TIN网,随后生成无纹理的3D模型,按纹理映射的数学关系,结合影像位置信息,快速完成纹理贴图,进而形成带有纹理的3D模型,如图1所示。
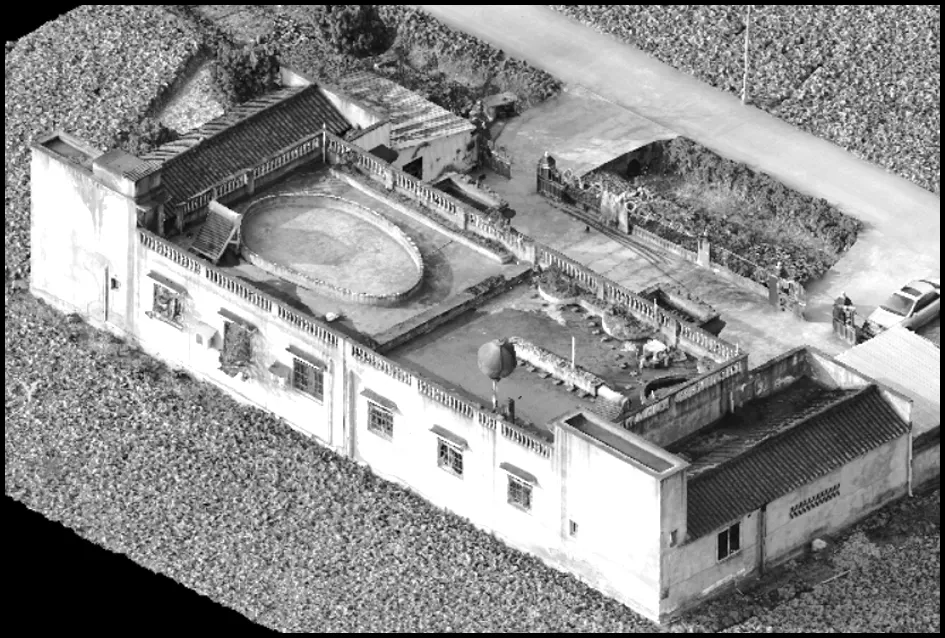
图1 自动贴膜后形成带有纹理的3D模型示意图
2 农村房地一体测量无人机倾斜摄影测量的应用
对于农村房地而言,一体测量的主要内容有以下几个方面:宅基地界址点、房屋角点、地籍调查底图的绘制等。实际测量中,可对倾斜摄影测量系统加以合理运用,具体的测量思路是在待测区域内布设像控点,通过实时差分定位(RTK)测出像控点及检查点的坐标。同时设计无人机飞行方案,据此获取待测区域的影像数据,制作出3D模型。
2.1 布设像控点
不同颜色的线条为大小不同的畸变误差,线条越长表明畸变误差越大,通过对像控点的合理布设,能够使误差传递被有效削弱,从而减少影像中的误差。
2.1.1 考虑因素
像控点的布设与影像成图质量具有密切的关联,实际布设中,除要考虑信号干扰问题外,还要对以下因素加以充分考虑:影像中像控点要清晰可见,易于识别;像控点的位置应当在距离影像边缘1.0~1.5 cm;避开阴影,以免影像不清晰;选择宽阔的地点布设,确保测量精度。
2.1.2 布设与标记方式
本次测量中,设计以下几种像控点布设方案:均匀布设、角部布设、四周均匀布设以及四周均匀加内部少量布设。为确保测量成果的精度,在倾斜摄影测量前,要对像控点标记进行布设,标记材料可以按照地面的坚硬程度选择,布点可选用“十”或是“L”,当选用“十”时,需要在中心点处喷射一个圆,直径以5.0 cm为宜,硬质地面选用油漆作为标记材料,软质地面选用腻子粉作为标记材料。通过RTK测量像控点坐标,确保测量结果的准确性。
2.1.3 像控点布设区域概况
本次所选的像控点布设区域为某地的一座村庄,测区内的地势较为平坦,村内的建筑物分布相对比较规则,砖瓦房为主,有部分混凝土房屋,均为低矮建筑,街道上的植被不是很多。按照上文中的像控点布设方案,在该区域内对像控点进行布设。为验证各种布设方案下构建的3D模型位置精度,选取7个检查点,分别为f1~f7,以RTK现场测量。f1、f2和f6全部都是围墙的拐点,f3为独立物拐点、f4和f5为大门拐点,f7为房角点。将各种方案建立的3D模型分别导入EPS软件中,通过计算后得出检查点的误差,结果表明,在测区的周边均匀布设、内部少量布设像控点的方案比较适合农村房地一体化测量,可将之作为首选方式。
2.2 无人机飞行方案
在农村房地一体测量中应用倾斜摄影测量系统时,无人机的选择及航线设计是重点环节,与测量成果密切相关。
2.2.1 选择飞行系统
在农村房地一体测量中,可以按照拍摄区域的实际情况,对无人机合理选择。农村房地测量通常都是以村为单位,从面积上看并不是很大,但位置分布较为散乱,所以大面积飞行系统并不适用,可将小型旋翼无人机与单镜头相机作为首选,其应用优势体现在以下方面:旋翼无人机重量轻、便于携带、价格低、飞行安全系数高、适用于低空摄影;单镜头灵活性更强。
2.2.2 航线规划方案
无人机航线规划过程中,要对以下参数合理设计:无人机飞行速度、航行高度、云台的倾斜角度、影像的重叠度以及地面分辨率等。这些参数之间存在一定的关系,为使所有参数更加合理,要明确它们关系。无人机的飞行高度与地面分辨率的关系为飞得越低,分辨率值越小,影像越清晰,但建筑物阴影会随之拉长,对后期影像数据的处理造成不利影响,并且还会造成无人机飞行安全性降低。结合相关经验,通过现场测试,最终决定将无人机的飞行高度设定为80 m。
无人机倾斜摄影的过程中,单镜头相机拍摄影像时,无人机始终处于飞行状态,由此会引起影像中的地物点位移,该因素除了与无人机的飞行速度有关外,还与单镜头相机的曝光时间间隔及地面分辨率等有关。为避免像点位移幅度过大导致拉花,影响拍摄质量,可将位移控制在0.3个像元内,与之相对应的地面分辨率及无人机飞行速度为0.022 m和6.6 m/s。
通常情况下,无人机航向的重叠度为60%,最低不得低于53%,若是地面起伏变化大,则重叠度应随之适当增大。航空数码技术的出现,使重叠度有所提高,基本上能够达到70%以上,旁向也能达到60%左右。但必须指出的是,随着重叠度的增加,影像的数量也会相应增多,内业数据处理量增大。在保证精度的前提下,为加快作业效率,可将影像重叠度设定为80%和70%。本次设计的航线规划方案中的关键参数如下:①无人机的航行高度80 m;②地面分辨率0.022 m;③航向重叠率90%;④旁向重叠率70%;⑤云台倾斜角45°;⑥飞行方式为井字形;⑦飞行速度6.6 m/s。
2.3 实际测量与精度分析
本次选择的测量区域为某村庄,村内的建筑较为集中,有砖瓦房和楼房,围墙以砖为主,土墙较少,图2为该村庄的俯视图。

图2 某村庄俯视图
2.3.1 无人机飞行质量
农村房地一体测量中应用无人机倾斜摄影测量时,要检查无人机的飞行质量,具体包括以下内容:影像重叠度、航线弯曲度、航高差等。经过检查得出如下结果:影像重叠度为76.69%、旁向重叠度为67.87%、航高差为7.836 m,航线弯曲度为0.645%。由上述检查结果可知,影像与限差要求相符,飞行影像清晰度较高,未出现重影现象,判定影像质量合格。
2.3.2 数据分析
为验证数据成果与农村地基测量规范的精度是否相符,在该村庄中选取17个房角点,用f1~f17表示,通过RTK测量坐标。因测量结果会受到偶然误差的影响,所以对所有检查点均采集10次数据,并以现场实测的坐标值作为真值,求取检查点的误差,检查点平均点位中误差为0.065 m,最大点位中误差为0.097 m。
可将农村房地一体测量的对象细分为以下几类:第一类为界址点,这是绘制地籍要素不可或缺的对象,必须保证精度;第二类宅基地内部的房角点,是绘制房屋坐落的重要因素;第三类地上物,如道路、水渠等。本次测量得出如下结果:在地势较为平坦的村庄,通过无人机倾斜摄影测量,可以使成果精度达到地籍测量一级界址点要求,而地势起伏的村庄,只能达到二级界址点的要求。
2.4 地形图制作
将基于现场实测结果构建的3D模型与影像数据全部导入EPS软件,分别在模型中绘制出该村庄内的房屋与围墙,以随机的方法选取地物点,包括砖房一角、混凝土房屋一角、路灯、道路转角、输电线杆等,随后采集上述地物点坐标,其中道路转角的x和y坐标超差,混凝土房屋一角的x和z坐标超差,输电线杆的z坐标超差。引起道路转角坐标超差的原因为采集数据时,采成直角和弧线;输电线杆超差的原因为影像不清晰,高程值超限;混凝土房屋一角超差是位置判别不同所致。
大体上可将坐标超差的原因总结为以下两个方面:不同测量人员在切点的判别上存在差异,采集数据时,3D模型角度调整不一致,进而造成成果超差;构建的3D模型存在质量缺陷,其中建筑物棱角点数量不足,TIN网过于粗糙,无法通过3D模型清晰表达出建筑细节。针对以上问题,可以采取以下方法加以解决:对测量中需要量取的位置进行明确,搞清不同建筑要从何处测量。3D模型具有自由旋转的特性,这样容易使不同测量人员产生不同的判别,对此,可将3D模型与DOM影像相结合,采集数据时,检查点位是否处在适宜的位置,若是不在,则可调换模型角度;借助Smart3D软件建模,编辑建筑物细节,使模型精细化,以此来满足测量需要。
3 结 语
农村房地一体测量是一项非常重要的工作,在此项工作的开展中,为确保测量成果的准确性,可合理应用无人机倾斜摄影测量技术。未来一段时期,要不断加大倾斜摄影测量技术的研究力度,通过逐步改进,使技术更加完善,从而更好地为测量服务。
[ID:013314]
猜你喜欢
软件(2020年3期)2020-04-20 01:45:18
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:02
中学生数理化·八年级物理人教版(2019年3期)2019-04-25 06:20:54
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
中学生数理化·八年级物理人教版(2018年3期)2018-05-31 08:52:45
Coco薇(2017年8期)2017-08-03 15:23:38
Coco薇(2015年5期)2016-03-29 23:22:15
少儿科学周刊·儿童版(2016年1期)2016-03-14 03:52:21
旅游纵览(2014年8期)2014-09-10 07:22:44
焦点(2014年3期)2014-03-11 23:03:43