
电力巡检四旋翼无人机的控制研究
2022-06-24 10:36王海楠陈玉权沈宝兴
自动化仪表 2022年4期
张 欣,黄 郑,孟 悦,王海楠,陈玉权,沈宝兴
(1.江苏方天电力技术有限公司,江苏 南京 211112;2.浙江华云清洁能源有限公司,浙江 杭州 310000)
0 引言
电力巡检是确保电网稳定、可靠运行的重要方式。近年来,随着智能技术的发展和无人机的广泛应用,传统的人工电力巡检方式逐渐转化为无人机巡检。通过在无人机上安装相机、热成像仪等设备,利用无人机环绕飞行、定点拍照等功能,实现了快速、高效的电力巡检,降低了人力成本。然而,由于无人机动力系统单纯依靠固定电机,缺乏其他机械装置辅助驱动,导致其控制难度较大,且控制稳定性较差。为提高无人机电力巡检的效率和稳定性,相关领域的专家开展了大量的研究。靳鹏等[1]基于计算流体动力学(computational fluid dynamics,CFD)计算方法,对无人机的旋翼-机身干扰气动特性进行了计算分析,设计了一套可有效解决无人机旋翼-机身气动干扰的控制系统。郭洪振等[2]、孙一凡等[3]提出了基于预设性能的无人机安全控制方法,避免了无人机的碰撞。上述控制方法虽然具有良好的跟踪能力,但其对无人机内环姿态控制效果较差。
为解决该问题,本研究采用具有良好抗干扰能力的自抗扰控制(active disturbance rejection control,ADRC)算法和改进模糊比例积分微分(proportional integral differential,PID)算法,以普遍性较强的电力巡检四旋翼无人机为研究对象,设计了一套电力巡检四旋翼无人机控制系统。
1 基本算法
电力巡检四旋翼无人机控制系统主要包括内环姿态控制和外环位置控制两个部分。由于两个部分的控制难度不同,因此本研究采用不同控制算法分别对其进行设计。其中,内环的姿态控制较为复杂,主要受到无人机系统扰动影响,且对误差较为敏感,因此研究利用降低误差的ADRC控制算法对其姿态进行控制。而无人机系统扰动对外环位置影响较小,若仍采用ADRC算法对其进行控制,反而增加了控制难度[4]。因此,本研究采用经典的模糊PID控制对电力巡检四旋翼无人机外环位置进行控制。
1.1 ADRC简介
ADRC是一种可实时估计自身扰动并根据提取的干扰信息进行快速补偿,进而减小扰动破坏程度的控制算法。
一般来说,ADRC包括跟踪微分器、扩张观测器、非线性状态误差反馈控制三个部分[5]。其中:跟踪微分器主要负责筛选出正确的微分信号和处理预设信号,同时解决超调量与响应速度优化问题;扩张观测器主要负责实时估计系统内扰和外扰误差,并进行动态补偿;非线性状态误差反馈控制主要负责选取误差信号的非线性组合方式,以提高信号处理的速度和准确率。
ADRC控制器结构如图1所示。
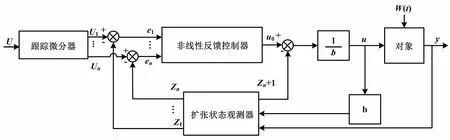
图1 ADRC控制器结构框图Fig.1 Structural block diagram of ADRC controller
1.2 模糊PID
1.2.1 模糊PID简介
模糊PID即根据模糊逻辑和模糊规则对PID参数优化,以快速、实时调整PID参数。其输入为误差e及其变化率ec,输出为PID控制参数ΔKp、ΔKi、ΔKd[6]。首先,根据e、ec和PID参数建立模糊规则,并连续监测e和ec;然后,根据构建的模糊规则对ΔKp、ΔKi、ΔKd进行校正,实现了PID参数的实时调整。模糊PID控制器原理如图2所示。

图2 模糊PID控制器原理图Fig.2 Principle of fuzzy PID controller
根据mamdami推理方法,采用重心法逆模糊其输出[7]:
(1)
式中:μi为隶属函数;Ai为输入模糊子集。
通过逆模糊处理得到的实际PID参数为:
(2)
式中:Kp0、Ki0、Kd0为初始参数。
系统实际控制输出可表示为:
(3)
1.2.2 模糊PID改进

①适应度函数改进。
为使适应度函数达到最佳,研究将控制器输出平方项加入目标函数,并增加超调惩罚机制,得到以下目标函数:

(4)
式中:tu为系统响应时间;e(t)为系统偏差,e(t)=y(t)-y(t-1);y(t)为被控对象输出量;ω1、ω2、ω3为权值常数;ω4为加权值;u(t)为控制器输出。
由此可得到适应度函数表达式,为:
(5)
②模糊规则改进。
根据设置的SA算法,选择概率、交叉概率、变异概率进行100次迭代,得到改进后Kp、Ki、Kd模糊控制规则,分别如表1~表3所示。在控制过程中,设置7种控制规则,包括NB、NM、NS、0、PS、PM、PB。
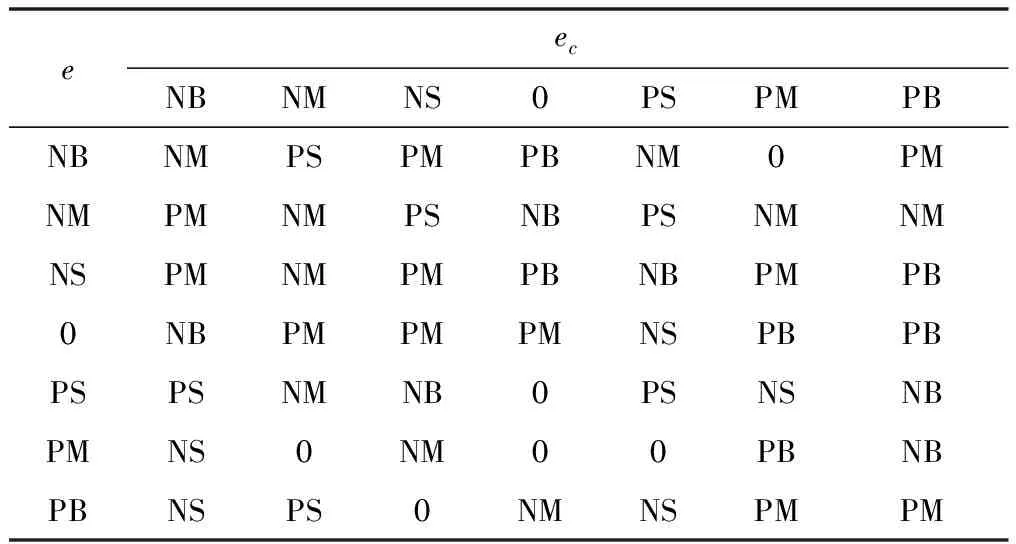
表1 Kp模糊控制规则

表2 Ki模糊控制规则

表3 Kd模糊控制规则
2 四旋翼无人机控制系统设计
2.1 基于ADRC的姿态控制器设计
基于ADRC的电力巡检四旋翼无人机姿态控制器包括偏航、俯仰、横滚三个部分。每个部分均可通过扩张状态观测器进行观测与补偿。姿态控制器框图如图3所示。图3中:δcol为总距输入;δlon为横滚输入;δlat为俯仰输入;δped为偏航输入;φr为横滚输入;θr为俯仰输入;φr为不偏航输入。

图3 姿态控制器框图Fig.3 Attitude controller block diagram
由于横滚、俯仰、偏航的通道设计原理相同,因此本研究以偏航通道为例,对其进行详细说明。偏航通道的ADRC控制器如图4所示。

图4 偏航通道ADRC控制器框图Fig.4 Structural block diagram of ADRC controller
当电力巡检四旋翼无人机的位置到达平衡点附近时,姿态角的变化近似为小角度变化,姿态角的角速率与其成准积分关系[8]。将偏航角通道近似为二阶积分串联结构,并令x1=φ,x2=φ≈r,则可得到偏航角运动方程[9]:
(6)

2.2 基于改进模糊PID的位置控制器设计
基于改进模糊PID的位置控制器是基于内环姿态控制器进行设计。
位置控制器结构如图5所示。

图5 位置控制器结构框图Fig.5 Structural block diagram of position controller
考虑到电力巡检四旋翼无人机在巡检过程中姿态变化较小,因此研究结合改进模糊PID和无人机机体坐标系三个方向预期加速度控制量进行了近似推导[10]:
(7)
整理式(7),可得:
(8)
式中:θr为预期俯仰角控制量;φr为横滚角控制量。
当无人机在悬停点进行小角度飞行时,cosθcosφ对横滚和俯仰飞行的升力损失进行补偿,进而提高了无人机高度通道的稳定性。
采用该控制结构对电力巡检四旋翼无人机进行控制,可实现根据无人机位置误差实时控制无人机飞行。当无人机位置误差较小时,该控制器可确保四旋翼稳定低速飞行;当无人机位置误差较大时,该控制器可调整飞行速度适当改变其位置,进而提高无人机的稳定性。
3 仿真试验
3.1 试验环境
本试验在Simulink软件中进行仿真。首先,根据电力巡检四旋翼无人机仿真模型以及无人机数学模型推导公式,在Simulink软件中搭建电力巡检四旋翼无人机仿真模型。
电力巡检四旋翼无人机系统结构如图6所示。

图6 电力巡检四旋翼无人机系统结构Fig.6 System structure of electric patrol 4-rotor UAV
图6中:δcol为标准化总距舵机输入,取值范围为(0,1);δlon为标准化俯仰舵机;δlat为标准化横滚舵机输入;δped为标准化方向舵机输入,取值范围均为(-1,1);U1~U4为电机预期电压,由拉力分配和限幅综合决定,可控制电机转速;T、τφ、τθ、τφ为力矩,由转速确定,可控制无人机自由飞行;Pn为位置向量,Pn=(xyz)T,m;Vb为线速度向量,Vb=(uvw)T,m/s;a比为姿态角向量,att=(Φθφ)T,rad;omg为角速度向量,omg=(pqr)T,rad/s。
然后,根据电力巡检四旋翼无人机的实际情况设置电机模型、力学模型、无人机运动学模型参数[11]。
参数设置如表4所示。

表4 参数设置
最后,在simulink软件中搭建无人机控制回路模型,即完成了试验前的所有准备。设电力巡检四旋翼无人机初始位置为[0 0 0],预设位置为[8 8 -8],跟踪姿态角和位置响应曲线,即可分析电力巡检四旋翼无人机控制器。
本试验最终构建的仿真模型如图7所示。
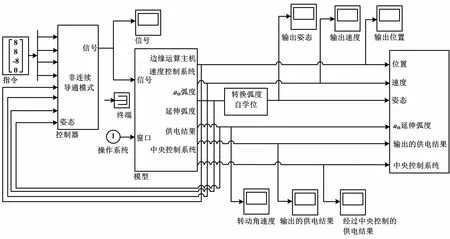
图7 仿真模型Fig.7 Simulation model
由图7可知,仿真模型包括四旋翼机体、飞行控制、模拟扰动、存储显示这四个部分。
3.2 结果与分析
为验证本研究设计的电力巡检四旋翼无人机控制系统的有效性,从无人机姿态响应特性和位置响应特性两方面对其进行分析。分析结果如下。
3.2.1 姿态响应特性
由于电力巡检四旋翼无人机的姿态变化由地面遥控器进行控制,因此本试验通过在姿态仿真模型中输入阶跃信号模拟遥控器控制,并观测其姿态变化,实现其姿态响应分析。
姿态角3°内的响应曲线如图8所示。

图8 姿态角3°内的响应曲线Fig.8 Response curves within 3° of attitude angle
设无人机初始姿态角为[roll,pitch]=[0,0],运行5 s后输入阶跃信号[roll,pitch]=[0.13,0.1],运行15 s再次输入阶跃信号[roll,pitch]=[0.13,0.1],由此可得0~20 s内无人机姿态角的俯仰角和横滚角响应曲线。由图8可知,无人机在5 s时加入阶跃信号后,姿态角俯仰角和横滚角分别在7 s和6.8 s与初始姿态[roll,pitch]=[0,0]重合;在15时再次加入阶跃信号后,姿态角俯仰角和横滚角分别在17.1 s和16.5 s与初始姿态[roll,pitch]=[0,0]重合。
考虑到5 s和15 s时姿态角的响应过程相似,故本研究仅对15 s无人姿态角响应进行分析。15 s时姿态角3°内的响应曲线如图9所示。

图9 15 s时姿态角3°内的响应曲线Fig.9 Response curves within 3° of attitude angle at 15 s
由图9可知,在15 s时给定阶跃信号后,俯仰角和横滚角超调量分别为0.36%和0.27%,瞬态响应时间分别为0.08 s和0.06 s,均可平滑过渡到初始姿态角设定值,且姿态角的改变控制在3°以内。由此说明,本研究设计的电力巡检四旋翼无人机飞行控制系统具有良好的跟踪能力。
此外,根据图4可知,无人机虽然在姿态控制中存在一定干扰,但整体上这种干扰并不影响无人机快速回正并达到稳定。如在17 s时,姿态响应发生了一次小于3 s的超调,但很快达到了稳定。由此说明,本研究设计的电力巡检四旋翼无人机飞行控制系统可快速响应,满足系统控制要求。
3.2.2 位置响应特性
无人机位置响应特性与其姿态响应特性过程类似,故本试验同样在5 s和15 s时两次加入阶跃信号,并观察其位置变化。
位置响应曲线如图10所示。

图10 位置响应曲线Fig.10 Position response curves
设电力巡检四旋翼无人机初始位置为[Xn,Yn,Zn]=[0,0,0]。其中:Xn、Yn分别表示正北、正东方向飞行距离;Zn为飞行高度。5 s时加入的阶跃信号为[Xn,Yn,Zn]=[3,3,-3]。15 s时加入的阶跃信号为[Xn,Yn,Zn]=[1,1,-1]。由此可得到0~30 s内无人机的位置响应曲线。
由图10可知,在5 s时加入阶跃信号后,正北、正东方向飞行距离Xn、Yn在13.8 s与初始位置重合;飞行高度Zn在9.1 s与初始高度重合;在15 s时加入阶跃信号后,正北、正东方向飞行距离Xn、Yn在23.1s与初始位置重合,飞行高度Zn在18.8 s与初始高度重合。
同理,考虑到5 s和15 s时无人机位置响应过程相似,故仅对15 s无人姿态角响应进行分析。图11为无人机15 s时位置响应曲线。由图11可知,在15 s时给定阶跃信号后,Xn、Yn、Zn方向均为超调量出现,正北、正东方向Xn、Yn的瞬时响应时间为0.3 s,飞行高度Zn的瞬时响应时间为0.2 s,均可平滑过渡到初始姿态角设定值。由此说明,研究设计的电力巡检四旋翼无人机飞行控制系统具有良好的位置跟踪能力。
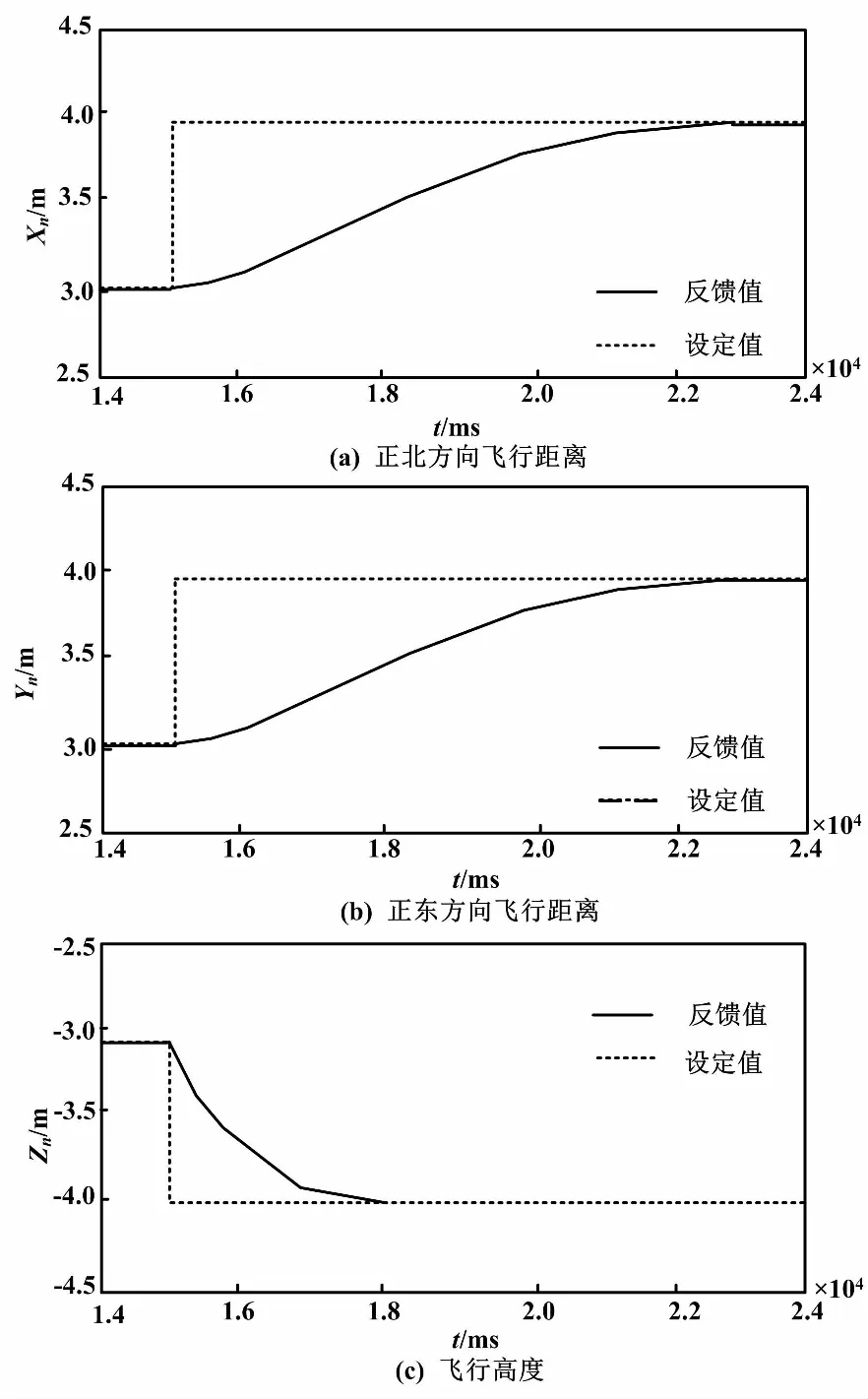
图11 15 s时位置响应曲线Fig.11 Position response curves at 15 s
此外,根据图11可知,无人机可快速到达目标位置,并在23 s左右达到稳定状态,任何位置响应不存在超调现象。由此说明,本研究设计的无人机控制系统具有良好的抗干扰能力和鲁棒性。
4 结论
本文基于ADRC和改进模糊PID的电力巡检四旋翼无人机控制方法,利用抗干扰能力强的ADRC算法设计了无人机内环姿态控制器,可使偏航、俯仰、横滚姿态角平滑过渡到初始设定值,并能使无人机快速回以正达到稳定,具有良好的跟踪能力和快速响应能力。同时,本文利用改进模糊PID设计的无人机外环位置控制器,在无人机正北、正东方向飞行距离和飞行高度上均无出现超调现象,且可快速过渡到设定值以达到稳定状态,具有一定的位置跟踪能力和抗干扰能力,实现了电力巡检四旋翼无人机的自主飞行控制。但由于条件限制,本研究还存在有待改进的不足之处,如没有考虑到实际电力巡检环境中的电磁干扰,以及无人机避障等。因此,下一步将从这些方面作深入研究。
猜你喜欢
化工自动化及仪表(2021年6期)2021-11-26
北京航空航天大学学报(2021年9期)2021-11-02
汽车维修与保养(2021年11期)2021-03-11
军民两用技术与产品(2021年9期)2021-03-09
沈阳工业大学学报(2020年3期)2020-06-03
电子技术与软件工程(2020年17期)2020-02-02
电子制作(2019年9期)2019-05-30
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年8期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
