
基于冷原子重力仪的船载动态绝对重力测量实验研究*
2022-06-18 03:09车浩李安方杰葛贵国高伟张亚刘超许江宁常路宾黄春福龚文斌李冬毅陈曦覃方君
物理学报 2022年11期
车浩 李安 方杰 葛贵国 高伟 张亚 刘超 许江宁常路宾 黄春福 龚文斌 李冬毅 陈曦‡ 覃方君††
1) (海军工程大学电气工程学院,武汉 430033)
2) (中国科学院精密测量科学与技术创新研究院,精密测量物理研究部,武汉 430071)
3) (哈尔滨工业大学电气工程及自动化学院,哈尔滨 150006)
1 引言
重力加速度是地球的一个重要物理参数,其随地点和时间而变化,对地球重力场实时、实地的高精度测量,具有重要的科学意义[1].海洋重力测量是目前获取高精度、高频海洋重力场信息的主要途径.传统的国内外动态海洋重力仪大多为相对重力仪,核心传感器采用直拉弹簧或零长弹簧,必然存在机械磨损、弹性疲劳与蠕变、零点漂移以及长期稳定性不足等缺陷[2],需要定期返回标准参考点进行误差标定和校准,严重影响海洋重力测量效率.而原子加速度计本质上具有低漂移、高精度及良好的长期稳定性,其与传统加速度传感器的组合,为实现长周期、深远海高精度重力场动态测定任务提供了可能.
近三十年来,冷原子重力仪迅速发展,涉及拉曼光、磁光阱、超高真空、冷原子干涉等多项技术的运用,实现绝对重力测量,展现出极高的灵敏度、稳定度和潜在精度[3].截至2020 年,全世界大约有50 个研究小组(包括约7 家私营公司)活跃在冷原子干涉测量的研究领域[4],包括了基础物理、惯性导航、水下探潜、资源勘探和重力场绘制等各个方面.早期的冷原子重力仪是在实验室安静环境中完成的重力测量实验[5],其在鲁棒性、动态范围和小型化程度等方面相对较弱,且实验装置仍十分复杂.随着技术的更迭、应用需求的扩大,小型化、可搬运的冷原子重力仪已经陆续走出实验室[6-9],实现了移动平台上或动态环境中的重力测量.近年来,法国航空航天实验室的集成化冷原子重力仪分别在海洋船载环境[10]和航空机载[11]中进行了动态重力测量,其中船载实验得益于原子加速度计固有的较高精度、对标定误差的消除以及陀螺稳定平台的良好质量,在海况恶劣的条件下取得了低于1 mGal (1 Gal=1 cm/s2)的精度,优于同船实验的商用海洋重力仪,机载冷原子重力仪测量的精度为1.7—3.9 mGal.华中科技大学研究团队[12]于2021 年报道了一种基于87Rb 原子干涉仪的小型车载便携式冷原子重力仪,在野外测量的灵敏度达到了精度超过了30µGal.浙江工业大学研究团队也分别于2019 年、2020 年及2021 年在车载定点条件[13]、船载系泊状态[14]和低速(0.55—5.5 cm/s)小车牵引状态下[15]开展冷原子重力仪动态测量相关实验,实现了原子干涉重力测量由静到动的过程.
与此同时,本文作者所在团队也开展了冷原子重力仪动态测量关键技术研究攻关,并完成了实验室静态条件下重力测量实验、较大航行速度(约4.6 kn)条件下船载动态重力测量实验,充分验证了原子干涉重力测量已初步具备走出实验室的能力,具有十分良好的应用前景.
2 基本原理
2.1 冷原子重力仪
冷原子重力仪是一种利用原子干涉测量绝对重力加速度的精密测量仪器,其基本原理在许多文献中均有详细描述[5,16],下面结合实验内容简要阐述.
原子干涉过程中,通过三维磁光阱冷却和囚禁碱金属源发射出的85Rb 原子,实现冷原子团,再经偏振梯度冷却将原子冷却到µK 量级,并将原子制备到D2 线F=2 态,关闭所有光场使得原子团在加速度的影响下自由下落.之后利用相位锁定的拉曼激光脉冲分别实现对85Rb 基态F=2,mF=0 的原子的分束、反射以及合束操作,从而实现原子的Mach-Zehnder 型干涉环路,将重力信息转移到原子干涉条纹中.最后,在探测区用时间飞行法分别探测原子的荧光信号,得到原子在F=3,mF=0 态的归一化的原子布居数P,可以描述为以下形式:

式中,P0,ϕ和C分别为条纹直流偏置原子干涉条纹的直流偏置、相位、对比度;ϕ由原子在干涉过程中经历不同的路径累积而得到,可以表示为
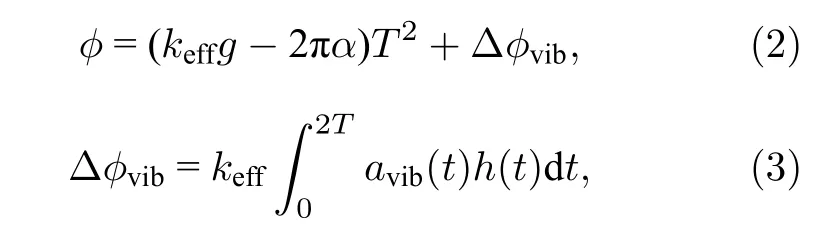
式中,α为拉曼光的啁啾率;keff为拉曼光等效波矢;T为相邻两束拉曼光脉冲之间的时间间隔;Δϕvib为由振动噪声产生的干扰相位[17];avib(t) 为振动加速度;h(t) 为冷原子重力仪的灵敏度函数.归一化测量得到布居数P将和传统加速度计测量得到的加速度进行组合测量.
2.2 与传统加速度计组合测量
冷原子重力仪进行动态测量面临以下问题.
1)振动噪声[18].动态条件下,载体存在横纵摇摆和垂向振动,利用惯性稳定平台可以隔离水平方向的摇摆,但运动带来的振动噪声相比于静态而言大好几个量级,噪声则会导致原子干涉条纹紊乱,难以得到准确的重力测量值.而仅由冷原子重力仪的测量,无法将振动噪声的影响从信号中分离出来.
2)测量死区[19].每个重力仪工作周期内,三维磁光阱补充工作物质、态制备以及荧光探测等阶段所需的时间称为“死区时间”.在该时间内,重力加速度信息不被测量,造成了冷原子重力仪的不连续数据输出,从而使与重力仪重复工作频率或其倍频相同的噪声在混叠效应下进一步干扰重力仪性能.
3)测量多值性问题[20].据(1)式和(2)式,干涉条纹布居数P与重力加速度之间呈余弦函数关系,而余弦函数具有多值性,一个布居数测量值可以对应多个可能的加速度值.对于T为20 ms 的干涉仪,干涉条纹的一个周期对应的加速度范围约为100 mGal.然而,当重力加速度的变化范围大于100 mGal 的时,很难单独实现重力加速度的测量,从而使仪器量程被限定在了该范围.
冷原子重力仪与传统加速度计组合测量,能够提供高带宽和大动态范围的连续测量,是解决冷原子重力仪动态测量时的问题的重要方法[21-23].组合测量的基本原理如图1 所示,将冷原子重力仪与传统加速度计放置在一起,它们将感受相同的垂向混合加速度g˜ (包含重力、垂向振动加速度等).
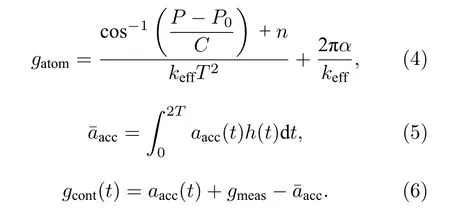
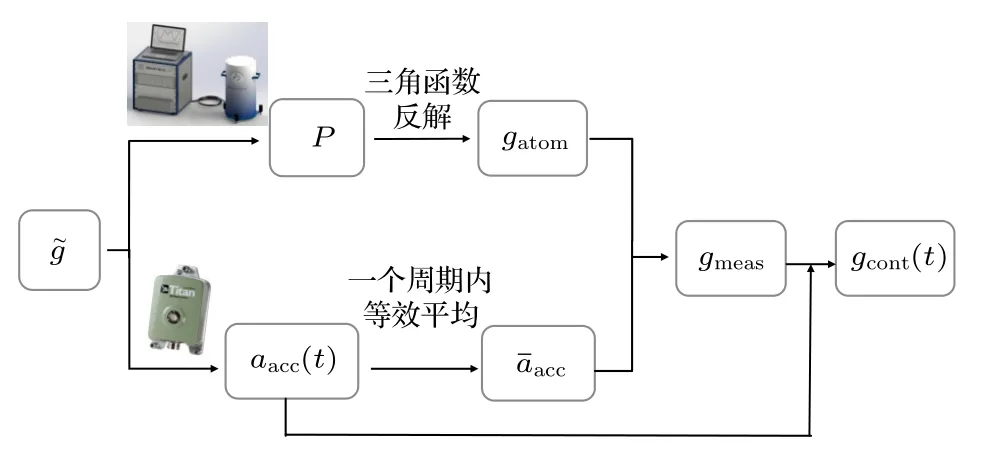
图1 冷原子重力仪/加速度计组合测量原理示意图Fig.1.Principal of combined measurement of cold atom gravimeter/accelerometer.
对于冷原子重力仪而言,其输出是单次干涉时间2T内加速度导致的布居数P,根据(1)式求解反三角函数,通过(4)式可以求解出一系列可能的原子干涉测量加速度gatom,(4)式中的n为非负整数.利用aacc(t) 与灵敏度函数h(t) 相乘并积分[10],通过(5)式可以得到2T时间内经典加速度计的等效加速度由于经典加速度计存在漂移,导致其测量值值存在偏差,通过寻找和粗略加速度值最接近的gatom值,可以确定准确的重力值gmeas.最后,计算冷原子重力仪与加速度计测量的差值,即为加速度计漂移,利用(6)式扣除该漂移可实现连续测量,得到连续重力加速度值gcont(t) .在该算法中,加速度计可以将振动噪声从重力数据中分离,重建条纹得到重力数据.同时,还可以在冷原子重力仪处于测量死区时间提供重力测量,以提高数据重复率.针对多值性问题,加速度计的应用先给重力仪一个粗略的测量值,冷原子重力仪再从这个粗略值出发寻找与之最近的精确值,只要加速度计的精度高于条纹一个周期对应的加速度范围,便可以消除多值性的影响,将量程提高到与传统加速度计相当的水平.假设加速度计的测量范围为±2 g,则通过此组合加速度测量方案,在保持原子干涉加速度测量精度不变的条件下,可将其测量范围从100 µg 提升到±2 g,从而大大提高冷原子重力仪的动态范围.
2.3 重力数据处理
为有效评估重力仪器性能指标,首先对冷原子重力仪采集的原始数据进行低通滤波处理,以消除高频噪声.然后进行Eötvös 校正,以消除向心力和科里奥利力的影响.最后,通过比对重力基准值,分别由内、外符合精度给出重力仪动态性能指标.
当载体在地球表面运动时,由地球自转、离心力和科里奥利力对安装在载体上的重力仪所施加的影响称之为Eötvös 效应.Eötvös 校正公式如下:

式中,ΩE为地球自转角速度;RE为地球半径;φ为载体所在纬度;v是载体运动速度;H为载体航向.
3 实验装置与步骤
3.1 实验装置
船载绝对重力测量实验系统主要由两种型号的重力仪及配套装置、惯性稳定平台及配套装置组成,表1 列出了相关硬件装置组成及功能.

表1 实验系统主要硬件设备及功能Table 1.Main hardware equipment and functions of the experimental system.
两套被试重力仪是船载实验的核心装置,如图2(a)所示.图中左边是冷原子重力仪,其性能指标在文献[24]中有所介绍.右边是dgShip 型船载重力仪,该型重力仪是一款针对船载平台的捷联式相对重力仪,是在国防科技大学SGA-WZ02 型重力仪基础上做的改型,其重力传感器采用了国产高精度石英挠性加速度计,姿态测量传感器采用了国产高精度激光陀螺,具有优于0.1 mGal/24 h 的静态稳定性精度,小于3 mGal 的月漂移和优于0.3 mGal 的动态重复测量精度.由于dgShip 型属于相对重力仪,因此在船载航行实验之前,需要在码头参考点提前测量绝对重力值,返航后需再次返回码头参考点进行重力误差归算,从而完成整个航线的动态重力基准的建立.为建立起始点的重力参考值,实验采用CG-5 型高精度静态相对重力仪,如图2(b)所示.CG-5 型重力仪是一种使用静电重力补偿、电容位移检测、全自动零长石英弹簧等现代技术组合的重力仪,主要用于地面相对重力高精度测量,观测精度优于5 µGal,静态长期漂移小于1.0 mGal/d.实验中,租用湖区旅游公司摆渡船作为实验测量船,如图2(c)所示,该实验船的尺寸约为16 m(长)×2.6 m(宽)×2.5 m(高),重量约为8 t.

图2 实验装置及航迹 (a) 冷原子重力仪与dgShip 型重力仪;(b) CG-5 型重力仪;(c)实验测量船;(d)计划航线Fig.2.Experimental device and route:(a) Cold atom gravimeter and dgShip gravimeter;(b) CG-5 gravimeter;(c) experimental measuring ship;(d) planned route.
为实现航行状态下的动态重力测量,将拉曼光反射镜固定在高精度加速度计上部,以实施冷原子重力仪和加速度计组合测量算法.将一套双轴惯性稳定平台及其减震装置装配于冷原子重力仪探头部分下方,以提供高度稳定的水平基准和姿态信息,保证冷原子重力仪在工作中始终保持稳定的垂直指向,减少运动载体姿态变化带来的测量误差,提高重力测量精度.为监测航行过程中载体的运动状态,在实验船顶部放置了GPS 天线,可用于与惯性稳定平台内的陀螺仪、加速度计数据组合解算载体位置、速度和姿态信息.
3.2 实验步骤
实验流程如图3 所示,首先用CG-5 型重力仪将中国科学院九峰动力大地测量中心实验站的重力基准点传递至码头起始点,计算得到航行实验起点的绝对重力基准值.然后在实验船上搭载冷原子重力仪和dgShip 型重力仪,准备进行船载重复航行实验.待重力仪工作稳定后,实验测量船从码头出发,沿着规划航迹在湖上航行,先向南再向西行至航行终点位置后,掉头航行至码头起点位置.然后,重复上述往复航线一次.图2(d)中给出了四个航次的航行轨迹,其中一个航次的整条测线长度约6 km.实验中要求船速稳定,测线尽量沿计划轨迹线,往返重复测线的水平偏差尽量小.同时,各个航次均应采集位置、速度和姿态信息以及其他传感器的原始信息,以完成数据处理以及重力提取所需的计算.

图3 实验流程Fig.3.Procedure of experiment.
4 实验结果与分析
4.1 实验室静态实验
在开展船载实验之前,先实验室内的静态条件下进行连续绝对重力测量,对被试冷原子重力仪的性能进行初步评估,并与后续动态测量实验相对比.实验中,冷原子重力仪的T为51 ms.图4(a)为约40 h 的连续重力测量数据,原始数据剔除野值后,得出的重力测量值如图中红点所示,黑线为潮汐模型计算的理论重力值.从图4(a)中可以看出,重力测量数据与理论潮汐值符合得很好.图4(b)为重力测量数据的Allan 方差曲线,从图中可以看出,被试冷原子重力仪静态条件下的灵敏度为,长期稳定度可达2.7 µGal.
图4 实验室静基座测量结果 (a) 重力测量值;(b) Allan方差Fig.4.Laboratory static measurement:(a) Gravity measurements;(b) Allan variance.
4.2 船载航行实验
4.2.1 航行路线与载体状态
船载实验在湖北省武汉市某湖区进行,重力仪及其配套测量设备布设于测量船上,冷原子重力仪的T设置为15 ms.测量船以约4.6 kn 的速度按照计划航迹在湖上航行,船体受湖面波动影响,有一定的晃动幅度,会对重力测量造成一定影响.由于惯性稳定平台的存在,冷原子重力仪的自身晃动被尽可能地减小.实验得到了冷原子重力仪底部的惯性稳定平台与GPS 装置组合测量数据,记录的载体运动参数如图5 所示,包括了航行轨迹、载体高度、航行速度以及载体航向.从图5 可以看出,在航行实验过程中,四条航行轨迹大致重合,但也有偏离航线的位置,这也影响了测线重复性.船体高度变化范围约为0.1 m,垂直方向总体而言较为平稳.惯性稳定平台数据也显示,尽管外部湖面环境较为恶劣,但在稳定平台的控制下,实验系统的横滚角保持在0.315°±0.005°水平,纵摇角保持在0.098°±0.001°水平,个别时间点出现剧烈角度变化.

图5 运动参数 (a) 航行轨迹;(b) 载体高度;(c) 航行速度;(d) 载体航向Fig.5.Motion parameters:(a) Trajectory;(b) height;(c) velocity;(d) heading.
4.2.2 绝对重力测量结果
如图6 所示,先将重力测量原始数据进行低通滤波,再经Eötvös 校正,得到绝对重力测量结果.由于实验过程中存在实验测量船航行到测线顶端转向、避让其他船只等情况,故按照四个航次的起止时间对绝对重力值数据进行截取,获得四条重复测线的测量数据.经计算,四条重复测线的内符合精度为2.272 mGal.然后,使用WGS-84 基准数据中给出的模型计算正常重力gM,CG-5 型重力仪测量值得出相对重力值gd,从而得出重力基准值g0=gM+gd.通过将冷原子重力仪测量值与重力基准值g0对比,计算得到四个航次测线的外符合精度分别为2.331,1.837,3.988 和2.589 mGal.
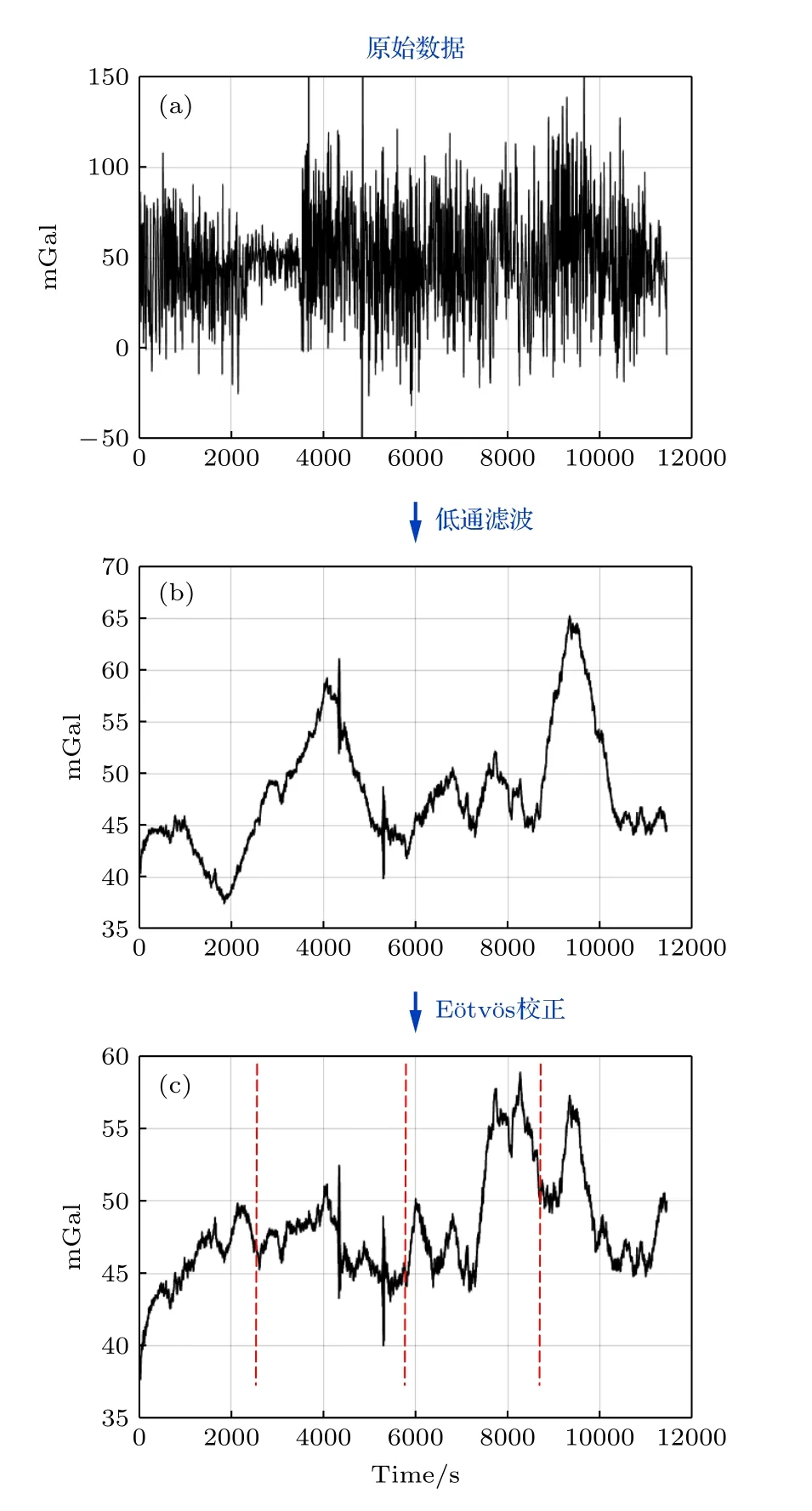
图6 绝对重力测量数据 (a) 原始数据;(b) 低通滤波后;(c) Eötvös 校正后Fig.6.Absolute gravimetry data:(a) Raw data;(b) low pass filtered;(c) Eötvös corrected.
4.2.3 振动补偿
振动噪声是影响冷原子重力仪测量精度的主要因素之一,如果振动噪声过大,超过冷原子重力仪的量程,则会导致干涉条纹的紊乱,无法获取重力信息.实验中,冷原子重力仪的物理探头中安装了高精度加速度计,利用其测量垂直方向加速度,并结合冷原子重力仪振动灵敏度函数,根据(3)式对冷原子重力仪的干涉条纹相位进行计算,并代入(2)式对相位进行校正.对于15 ms 的干涉时间,正向、负向啁啾扫描相位得到的干涉条纹如图7所示,包含了振动补偿前和补偿后的干涉条纹.其中黑色点为干涉条纹,红色的正弦曲线为拟合值.可以看到,振动补偿前干涉条纹无法拟合.振动补偿后,评估得到正向啁啾扫描拟合得到的相位条纹不确定度是0.05875 rad,对应的重力测量不确定度是1.6 mGal;负向啁啾扫描拟合得到的相位相位不确定度是0.06577 rad,对应的重力测量不确定度是1.8 mGal .
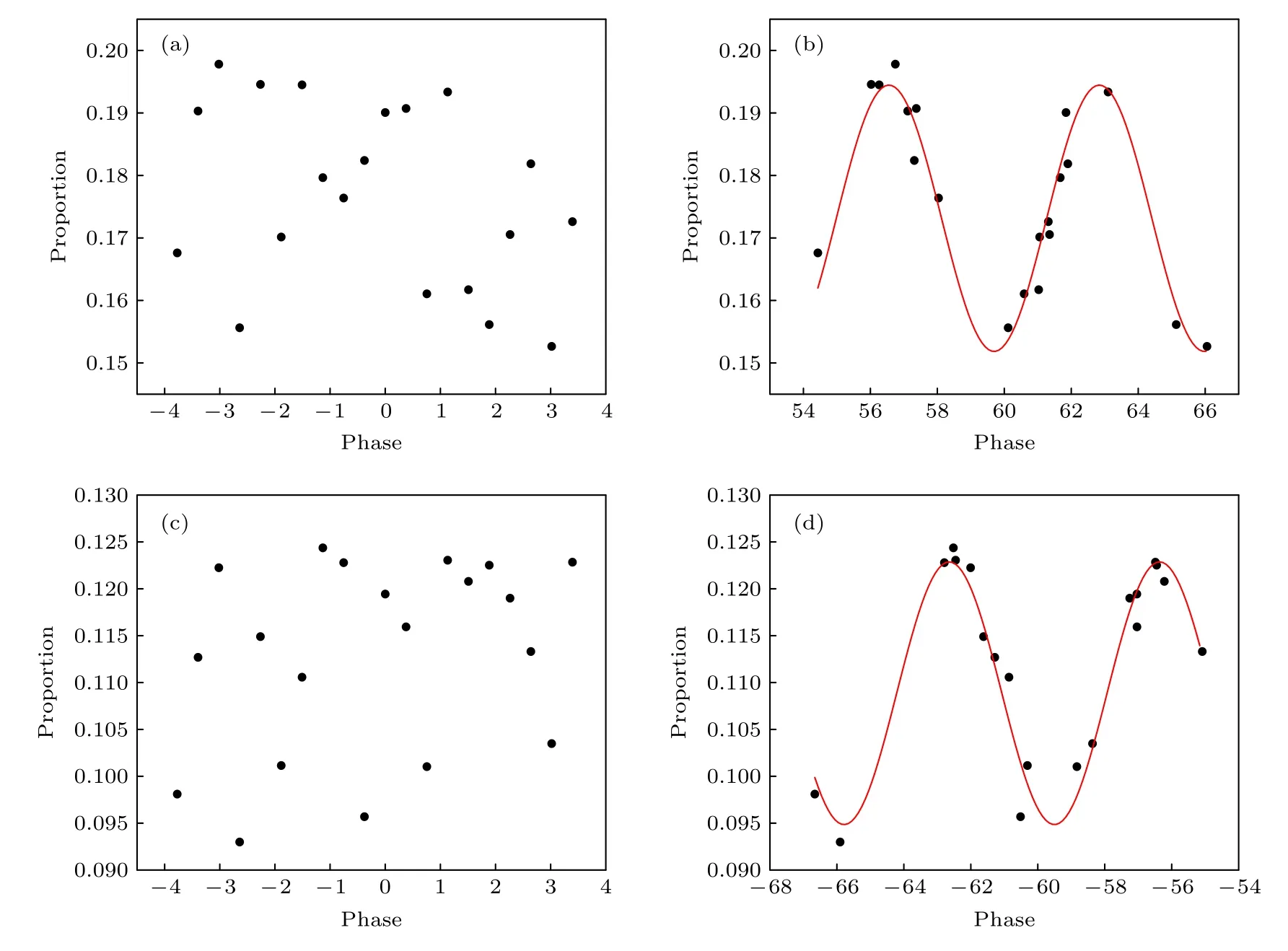
图7 干涉条纹 (a) 补偿前条纹(正啁啾);(b) 补偿后条纹(正啁啾);(c) 补偿前条纹(负啁啾);(d) 补偿后条纹(负啁啾)Fig.7.Interference fringes:(a) Before compensation(positive chirp);(b) after compensation (positive chirp);(c) before compensation(negative chirp);(d) after compensation(negative chirp).
4.3 实验分析
本次实验充分验证了冷原子重力仪搭载惯性稳定平台在湖上航行状态下进行动态重力测量的可行性,完成了实验室静态条件下和较大航速(约4.6 kn)条件下的实验,实验得到了极具潜力的精度指标,验证了实验系统动态测量技术的适应性.通过对实验过程和数据的分析,本文认为目前动基座冷原子重力仪精度较低的原因有如下几点.1)动基座冷原子重力仪一般在振动噪声较差的环境下工作,为了适应振动环境、增大测量范围,同时平衡重力测量精度,冷原子海洋重力仪一般选取的演化时间为15 ms 左右,远低于静态重力测量中选取的干涉时间,这是动基座重力仪测量精度较低的一个最重要的因素.2)动基座冷原子重力仪的测量精度还受限于所处的环境,虽然通过经典加速度计的振动补偿环境振动噪声的影响,但是其最终的测量精度,特别是短期测量精度,还是受限于经典加速度计的测量精度.同时当振动噪声过大时,原子干涉仪还会面临干涉条纹对比度下降,探测效率降低等问题,这些都会对(3)式的补偿算法带来不利的影响.3)惯性稳定平台只能提供一定精度角度稳定,当船只角度剧烈变化时,惯性稳定伺服系统的误差可能会增大,从而影响重力测量的精度.同时实验中,Eötvös 校正公式中的速度、航向、纬度等信息均由惯性稳定平台给出,相当于惯性导航系统与GPS 的组合导航,解算过程中存在的偏差会带入Eötvös 校正公式.此外,受限于测量带宽,冷原子重力仪数据输出频率远低于惯性导航系统数据输出频率,在离散数据对齐的过程中,采取的策略是先对齐数据起始时间,再用插值法使不同采样率数据对齐,从而完成重力测量值的Eötvös校正.因此,Eötvös 校正的过程中存在一定的误差,校正不够准确.4)冷原子重力仪本身的测量精度还有一定的优化空间,例如,二阶塞曼频移、二阶斯塔克频移、拉曼光波前畸变等的影响需要进行进一步的测量和评估.
从测量结果来分析,四航次的内符合精度的测量重复性有待提高,说明冷原子重力仪自身动态测量稳定性还需进一步完善.第三航次的外符合精度劣于其他三个航次.在第三航次的航行过程中,一条渔船穿越了实验航线,实验测量船进行了相应避让.出现了比其他航次更为剧烈的姿态角变化,当姿态角变化大时,惯性稳定平台的超调量变大,控制时间变长,控制精度可能会下降.
5 结语
本文基于冷原子重力仪、惯性稳定平台和高精度动态相对重力仪搭建了一套绝对动态重力测量系统,完成了实验室静态测量实验和4.6 kn航速条件下的船载动态测量实验,凸显了冷原子重力仪无机械磨损、无零点漂移误差的优势,实验室静态条件下已经达到了2.7 µGal 的长期稳定度,船载动态实验也得到了传统动态重力仪相当的动态测量精度(约mGal 级),动态测量指标极具潜力.同时,对振动补偿后正、负啁啾扫描拟合得到的相位条纹不确定度进行了分析.实验系统采用冷原子重力仪与加速度计组合测量算法作为解决振动噪声、测量死区、测量多值模糊性三大动态测量问题的方法,在接近实际应用场景条件下通过实验表明原子干涉重力测量“绝对且能动”,充分验证了冷原子重力仪已经基本具备走出实验室进行动态测量的能力,具有十分良好的应用前景.本研究还为海洋动态环境下原子干涉绝对重力测量提供了前期验证和技术方案参考.本文实验研究得到了湖南艾恩斯科技有限公司的大力支持,特此致谢!
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
传感器与微系统(2022年3期)2022-03-23
飞控与探测(2021年5期)2022-01-05
导航与控制(2020年3期)2020-09-09
科普童话·神秘大侦探(2020年3期)2020-05-11
导航与控制(2019年4期)2019-09-25
小福尔摩斯(2019年2期)2019-09-10
都市丽人(2017年4期)2017-04-12
小天使·一年级语数英综合(2016年9期)2016-05-14
Coco薇(2016年3期)2016-04-06
