
考虑路面影响的智能车辆路径跟踪控制研究
2022-06-15 09:06何友国王雨袁朝春
电子设计工程 2022年11期
何友国,王雨,袁朝春
(江苏大学汽车工程研究院,江苏镇江 212013)
路径跟踪控制作为智能汽车的三大关键技术之一,是实现车辆智能化的必要条件。路径跟踪控制是通过控制车辆的转向系统以及制动/驱动系统使车辆以期望的速度沿着期望的路线行驶[1]。目前主流的路径跟踪控制算法有PID 控制[2-3]、模糊控制[4-5]、最优预瞄控制[6-8]、最优控制[9-10]、滑模控制[11-12]等。但这些算法对车辆参数和环境依赖程度高,并且不能考虑车辆行驶过程中的状态量及控制量的约束问题,而模型预测控制算法能够考虑系统中的状态约束,已成为应用最广泛的优化算法[13-15]。在设计路径跟踪控制器时,应当综合考虑跟踪精度和车辆稳定性,而路面附着系数与车辆稳定性有密切关系,因此有必要设计一种适用于多种路面的能够保证车辆在跟踪过程中的稳定性的路径跟踪控制器。该文根据模型预测控制算法,以车辆三自由度动力学模型为基础,针对车辆横摆角速度和质心侧偏角这两个状态变量设计了随路面附着系数变化而变化的动态约束边界,建立了适应于不同路面的模型预测路径跟踪控制器。最后,通过搭建Carsim 和Matlab/Simulink联合仿真平台验证了设计的控制器既能准确地跟踪期望路径,又能在不同附着路面条件下保证车辆的行驶稳定性。
1 车辆三自由度动力学建模
该文建立了车辆三自由度动力学模型,如图1 所示。该模型有3 个自由度:沿x轴的纵向运动,沿y轴的横向运动以及绕Z轴的横摆运动。在建立车辆三自由度模型的过程中,该文对模型作了简化[16],即忽略车辆的转向系统,忽略悬架系统的作用,忽略空气阻力的影响,假设轮胎侧偏特性处于线性区。

图1 车辆三自由度动力学模型
根据牛顿第二定律,可以得到沿x轴、y轴和绕Z轴的动力学方程如下:

其中,m为整车质量,vx为车辆纵向速度,vy为车辆横向速度,φ为横摆角,为车辆横摆角速度,Iz为整车转动惯量,Fxf、Fxr为车辆前后轮胎的纵向力,Fyf、Fyr为轮胎的侧向力,δf为车辆前轮转角,lf、lr为车辆质心到前后轴的距离。
根据建模时的假设,在车辆轮胎侧偏角和纵向滑移率较小时,轮胎处于线性区域,因此前后轮胎的纵向力、横向力可以表示成:

其中,Cxf、Cxr为前后轮胎的纵向刚度,sf、sr为前后轮胎的纵向滑移率,Cyf、Cyr分别为前后轮胎的等效侧偏刚度,αf、αr分别为前后轮的侧偏角。车辆的前后轮胎侧偏角与其运动参数的关系为:

车体坐标系o-xy与惯性坐标系O-XY的转换公式为:

综合以上各式可得车辆三自由度动力学方程并表示为以下形式:

2 路径跟踪控制器设计
在路径跟踪过程中,模型预测控制器是由预测模型、目标函数、约束3 部分组成。控制器在当前时刻采集车辆状态量的实时数据,通过预测模型预测未来一段时间内的车辆状态值,并且计算出满足目标函数和约束的控制量序列,并将序列的第一个值作为控制量作用到系统中,在下一时刻,继续重复以上行为。
2.1 线性时变模型
上述建立的车辆三自由度模型为非线性状态方程,由于非线性模型预测控制器计算量大,运算复杂,实时性差。因此该文采用线性模型预测控制器来跟踪期望路径。对式(5)进行线性化[17],而线性连续性状态方程不能直接用于模型预测控制器的设计,需要对其离散化,可得:

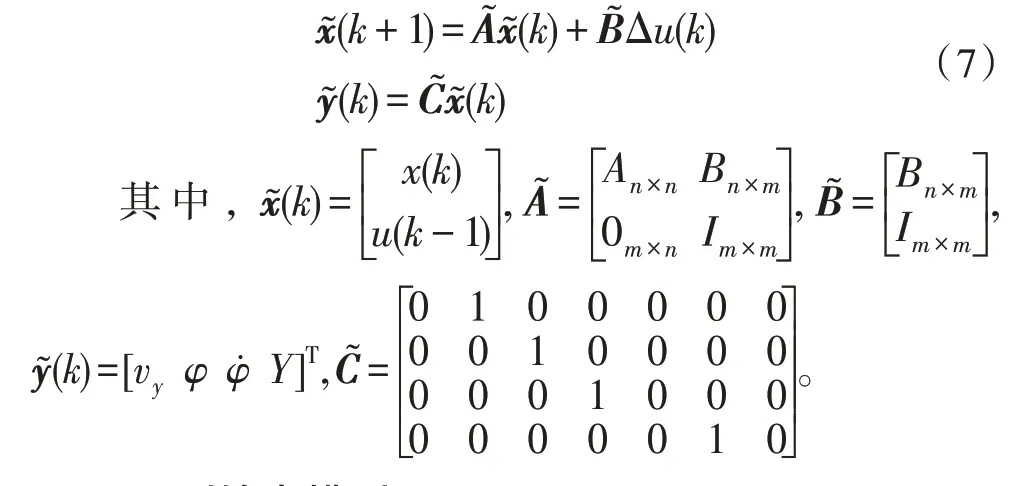
若目标函数的状态量为控制量,优化求解计算过程简单,但是不能精确地约束控制量。为了避免控制量u(k)在车辆行驶过程中产生突变,需要将控制增量Δu(k)引入到预测模型状态方程中,并对其进行约束。令Δu(k)=u(k)-u(k-1),作矩阵变化,可将控制增量引入到状态方程中。此外,在后续的目标函数设计过程中,需要将车辆横向速度vy、横摆角φ、横摆角速度横向位置Y这些状态量作为输出纳入优化求解的范围内。选择系统的输出量为车辆横摆角、横摆角速度、横向位置、横向速度。因此,形成新的状态方程,如式(7)所示:
2.2 预测输出模型
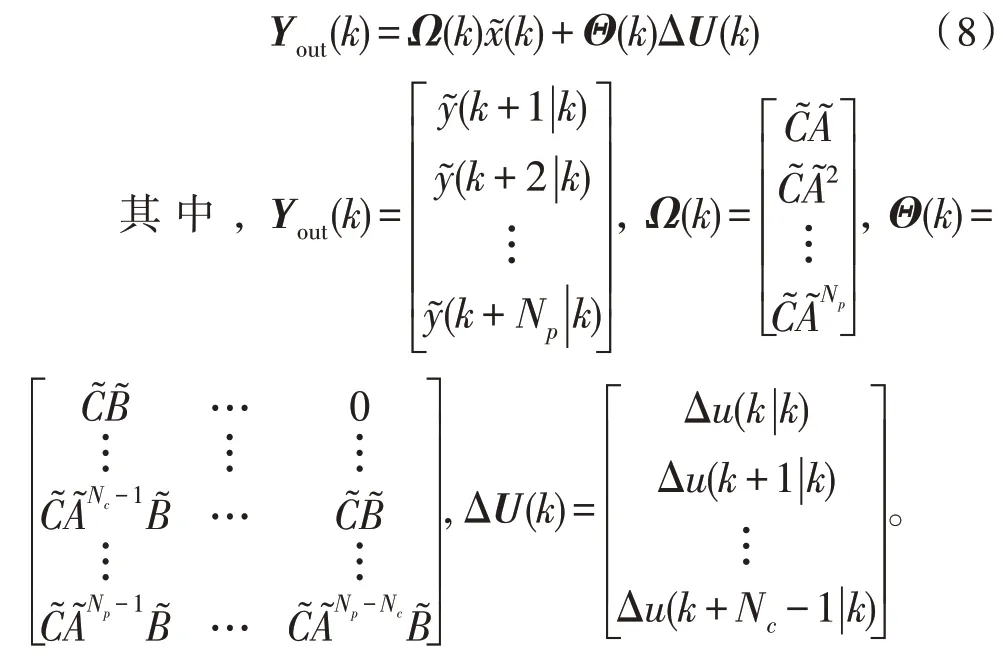
根据模型预测控制原理,可得在k时刻对k+1,k+2,…,k+Np时刻的输出预测值,由式(8)表示:
2.3 目标函数
目标函数表示的是跟踪过程中期望的车辆状态,即输出量和控制量与期望的偏差数值最小。为了兼顾车辆在路径跟踪过程中的跟踪精度和稳定性,在目标函数中考虑了输出量车辆横摆角φ、横摆角速度横向位置Y、横向车速vy的预测值与参考值之间的偏差。因此目标函数可以表示成以下形式:

2.4 约束设计
为了提高车辆路径跟踪过程中的稳定性,在控制器中引入横摆角速度和质心侧偏角的动态边界作为动力学约束。由于两个参数的边界都与路面条件有关,因此构建了与路面附着系数相关的动态约束边界。
取横摆角速度质心侧偏角β、横向车速vy的经验边界值为:

由于式(10)为经验公式,在运用时需要根据车辆实际情况作适当调整。因此,控制器控制量、控制增量、输出量约束可以设为以下形式:

2.5 优化求解
综上,车辆路径跟踪问题就可以转化为求解带约束的目标优化问题,可以写为以下形式:
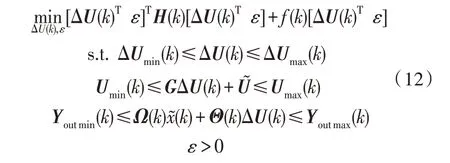
求解上式,即可得到当前时刻系统的最优控制增量序列,取序列的第一个控制增量Δu(k|k)应用于系统上。
3 仿真验证
基于上述控制器设计,在Carsim和Matlab/Simulink联合仿真平台上搭建模型进行仿真。在对车辆行驶稳定性进行测试中,一般选用双移线作为参考路径来验证控制器的跟踪能力。该文将通过双移线路径对所设计的模型预测控制器进行验证。
控制器参数如表1 所示,车辆动力学参数如表2所示。

表1 控制器参数
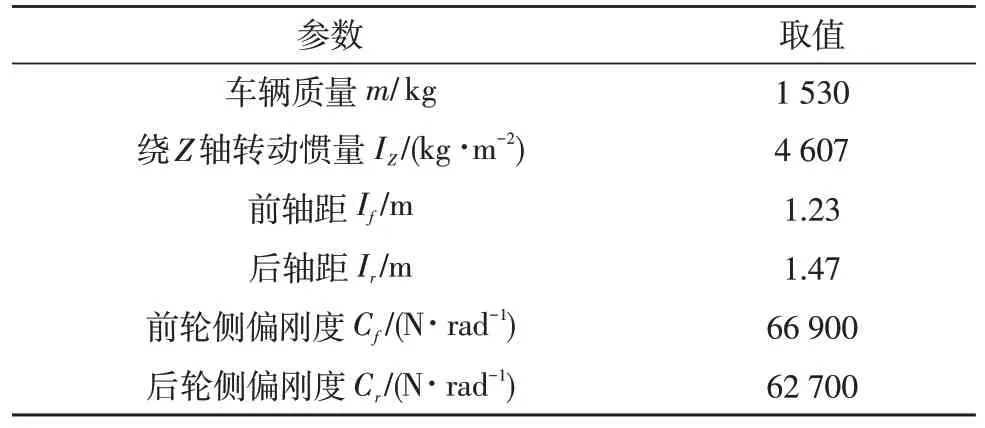
表2 车辆动力学参数
该文选定车辆以纵向速度分别为10 m/s、20 m/s在路面附着系数为0.4 的湿滑路面上的行驶工况下进行验证,分别对跟踪精度和稳定性进行比较。两个工况下的横摆角速度和质心侧偏角的边界值如表3 所示。仿真结果如图2~图4 所示。

图4 不同速度下质心侧偏角对比

表3 参数边界值
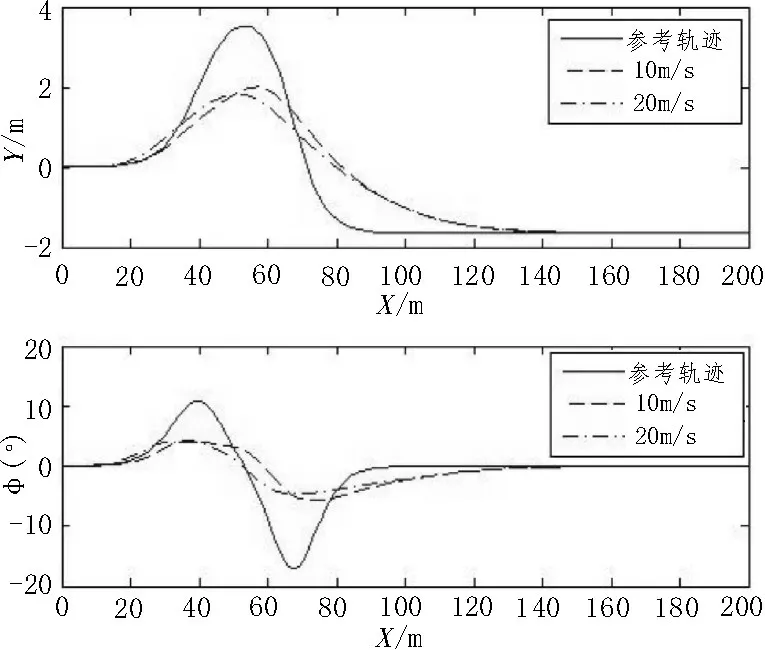
图2 不同速度下路径跟踪仿真对比
图2 表明了在两种速度工况下,设计的路径跟踪控制器能够较好地实现路径跟踪,路径跟踪误差随着车速的增大而增大。
图3 表明了在两种速度工况下,车辆横摆角速度在路径跟踪过程中的变化情况,在车速较大时,横摆角速度波动较大,峰值为10.28°/s,但是始终保持在此工况下横摆角速度边界值内。
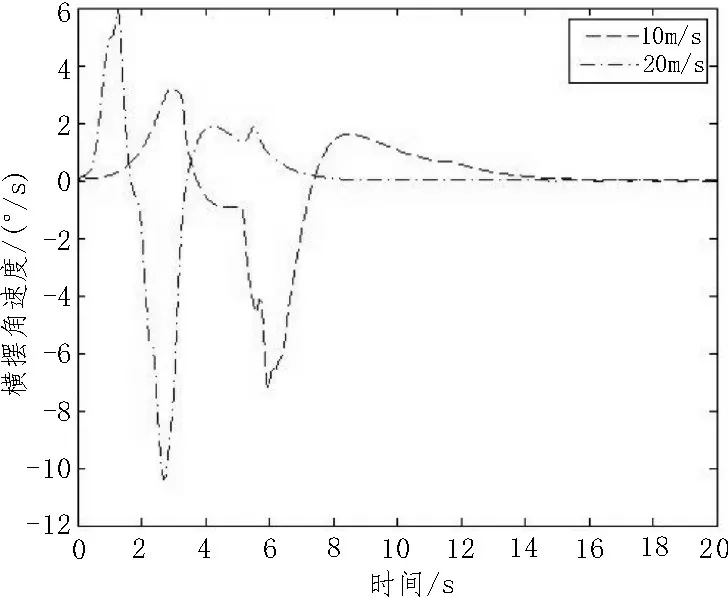
图3 不同速度下横摆角速度对比
图4 表明了在两种速度工况下,车辆质心侧偏角在路径跟踪过程中的变化情况,两种工况下的质心侧偏角的数值远低于设定的边界值,表明了车辆在行驶过程中非常平稳。综合以上分析可知,该文设计的考虑多个动力学约束的模型预测控制器能够保证车辆在路径跟踪过程中保持行驶稳定性和较好的跟踪精度。
为了验证设计的路径跟踪控制器在低附着路面上的行驶稳定性,在纵向车速为20 m/s 的情况下设计了控制器A 和控制器B。控制器A 是考虑动态约束的路径跟踪控制器,控制器B 是未考虑动态约束的模型预测控制器。在跟踪双移线时两个控制器的横摆角速度仿真结果如图5 所示。
从图5 可以看到,控制器A 在跟踪过程中的横摆角速度值一直保持在设定的边界内,而控制器B 由于没有加入对横摆角速度的约束,在大曲率弯道处超出了设定的边界。由此可得,设计的控制器A 能够将横摆角速度约束在稳定边界内,车辆的行驶稳定性得到了保证。
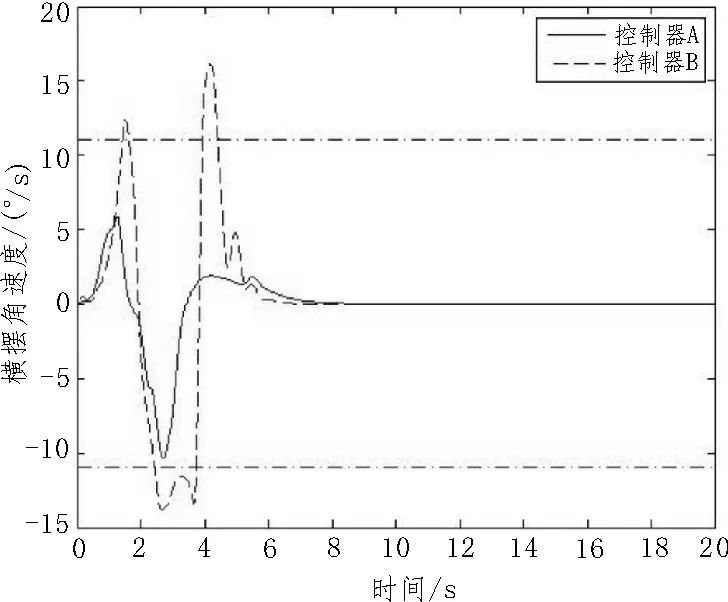
图5 不同控制器横摆角速度对比
4 结论
该文针对基于模型预测控制智能车辆路径跟踪问题进行研究,提出了一种适应于不同路面的考虑动态动力学约束的基于模型预测控制算法的智能车辆路径跟踪控制器。通过将车辆跟踪行驶过程中的质心侧偏角和横摆角速度的数值约束在随路面附着系数变化而变化的动态边界内,来保证车辆在不同路面上跟踪行驶的稳定性。以车辆三自由度动力学模型为基础并在Carsim 和Matlab/Simulink 联合仿真平台上进行验证,结果表明,设计的路径跟踪控制器在不同的速度工况下能很好地跟踪期望路径,具有较好的速度鲁棒性和行驶稳定性。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
民用飞机设计与研究(2020年4期)2021-01-21
新课程·中学(2019年7期)2019-09-17
中学课程辅导·教师通讯(2018年10期)2018-09-04
物理教学探讨(2018年1期)2018-02-13
中学生数理化·高一版(2017年3期)2017-07-08
小学阅读指南·低年级版(2017年1期)2017-03-13
火控雷达技术(2016年1期)2016-02-06
人生十六七(2015年6期)2015-02-28
汽车文摘(2014年10期)2014-12-13
