基于图谱分解和多信号融合的无线定位算法
2022-06-14 10:07:26龙小丽李欣雪
计算机仿真 2022年5期
龙小丽,韩 筠,李欣雪
(1. 广东理工学院电气与电子工程学院,广东 肇庆 526100;2. 广东海洋大学数学与计算机学院,广东 湛江 524000)
1 引言
随着计算机设备的高速发展与普及,基于无线传感器的各种位置服务需求也日益迫切。比如北斗卫星定位与全球定位系统等,但是二者在较多建筑物的密集城区,会受到一定干扰,很难进行有效定位。因此,逐渐衍生出了几种较为经典的定位方法及:射频信号、超声波与红外线等定位方式,其中,红外线与超声波的定位技术,要比射频定位方法更为精确,但是由于其需要使用专业的硬件设备,且信号需要存在一定的视距传输,导致定位方位受到限制,很难进行大范围的部署,同时,因为视距传输的特性,使得该方法的定位收敛效率较慢。
针对上述问题,本文提出一种基于图谱分解和多信号融合的无线定位算法,依靠图谱分解算法,标记无线信号,随后使用多信号融合算法计算无线信号的具体密度与大致分布,同时,修正无线信号的不连续问题,最后通过计算信号传播时延的方差和均值,并利用协方差矩阵对无线信号的分布位置进行计算,取结果内的均值作为最终定位结果。
2 图谱分解与多信号融合下无线定位算法研究
2.1 基于Laplacian矩阵与谱分解的无线信号数据标记
组建所有训练信号构成的图G(V,E),其中,信号节点集V存在的训练信号样本可描述为:l种存在标记的信号与u种不存在标记的信号,节点之间的边集E是(l+u)×(l+u)的非负值矩阵W,其中,wij代表第i个与第j个训练信号之间存在的关联,能够通过k-NN或高斯函数对其进行赋值,拟定对角矩阵为
D=diag{d11,d22,…,dii,dnn}
(1)
式中,D为对角元素[1]即节点的度,那么无线信号图Laplacian矩阵就能够定义成:L=D-W或L=D-1/2LD-1/2=I-D-1/2WD-1/2。
将Laplacian矩阵的特征值进行分解后,L的特征值与特征向量[2]就可以被描述成λi,φi,同时特征值会以非降次序排列,那么就会存在
(2)
通过式(2)的计算,能够得到与无线信号存在关联的两种Laplacian矩阵谱性质。
1)Laplacian矩阵谱值[3]能够被表示成特征向量的平滑程度。其具体描述如下所示:
针对任意一个n×1向量f的平滑性都能够依靠向量f内两种元素的值与相应的权值来进行衡量,就是说假如向量f是平滑的,那么列向量f内连接权值wij较大的两种元素的值就一定是相似的,向量f的平滑性能够通过式(3)进行计算

(3)


(4)
因此,Laplacian矩阵谱的值能够表示为无线信号特征向量的平滑强度。
2)假如无线信号图G存在n种连通分量[5],那么Laplacian矩阵就存在n种0特征值。Laplacian矩阵的谱存在两种性质,第一种就是具有两个连通分量的链路,第二种就是无线信号的图谱与其特征向量。
其具体描述如下:
一种具有两个连通分量和边权值[6]是1的图,图内的谱具有两个值是0的特征值,对应的特征向量为平滑状态,并且随着特征值的逐渐上升,对应的特征向量也会出现振荡。
图1展示了上述无线信号图谱内所有节点在两种特征向量内所组成正交空间的邻接关系,其中两个节点之间的线代表了这两个节点在该正交空间[7]上是邻接的,同时图内实心节点代表存在标记的无线信号数据,空心节点代表没有标记的无线信号数据
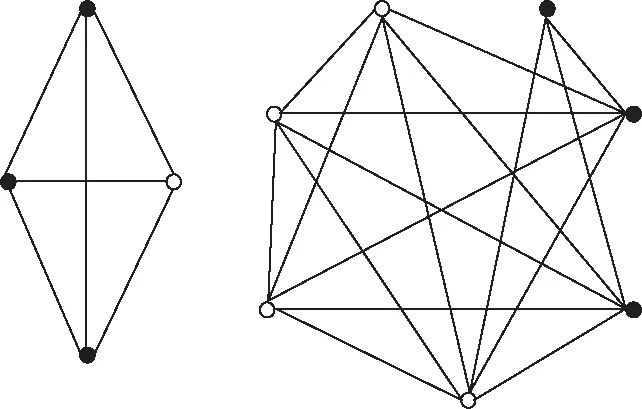
图1 无线信号在特征向量空间内的邻接关系
通过图1能够看出,无线信号图的Laplacian矩阵特征向量具有初始图中节点的簇信息,依靠该信息,通过存在标记数据的信息,可以将不存在标记的信号数据进行标记。
2.2 基于多信号融合的无线信号密度测量
对于无线信号的两相流,拟定无线信号两相质量是mp,密度是ρp,信号相质量为mf,密度为ρf,信号的两相流体系的总密度是ρm,那么凭借定义,该无线信号的质量密度就是
φm=mp/(mp+mf)
(5)
将式(5)进行转化,获得
φm={ρp(ρm-ρf)}/{ρm(ρp-ρf)}
(6)
在现实环境中,ρp与ρf作为参数是已知的,只需要确定该无线信号密度ρm,就能够获取信号的大致分布。
无线信号在传输的过程中,信号的阻抗为Z=ρc,此处ρ代表信号的混合密度,c代表信号的传输效率,凭借计算阻抗Z与信号速度c,能够获得信号的具体密度,进一步能够通过式(6)确定无线信号的大致分布,所以,本文将问题转化成对阻抗与信号速度的获取[8]。
在无线信号进行传输的过程中,因为信号的特性存在不同的问题,部分信号会被反射,部分信号会被透射,拟定反射系数是
(7)
把式(7)进行转化,获得无线信号的阻抗描述式为

(8)
其中,Zm代表无线信号的阻抗值。
综上所述,要得到无线信号的两相流密度,就需要得到信号的阻抗值与信号传输速度值[9],经过式(7)与(8)进行计算,能够得到信号的阻抗值,同时其密度能够经过无线信号的反射系数得到。获得这两种数据之后,凭借式(6)对其进行计算,以获取无线信号的具体分布。
2.3 无线信号的相位不连续影响与解决方法
拟定存在M段无线信号x0,信号频率拟定成f1,采样频率拟定成fs,所有无线信号的长度均为s,以第m段无线信号作为待校正对象,那么前(m-1)段无线信号的总长度就是B(m)=(m-1)s,m∈[1,M],拟定信号的初始相是θ(m),由此能够获得同频等长信号模型如下
x0[B(m)+a]=cos[θ(m)+2πf1a/fs]
(9)
其中,a∈[1,s],x0(B(m)+a)代表x0内第[B(m)+a]个无线信号的采样点值。所有信号间的相位不连续即指θ(m+1)≠θ(m)+2πf1d/fS,即不能把x0内M段无线信号相连组成一段长度达到B0的连续信号。
首先考虑x0的第m段无线信号,通过傅里叶变换对其进行处理,得到

(10)
然后把所有无线信号的频谱进行累加[10],获得整体信号的频谱

(11)
其中,F[·]代表对无线信号进行傅里叶转变结果。在没有进行相位校正的状态下,无线信号频谱只是在其单段信号的频谱内增添了一个权值,同时该权值和频率并不存在关联[11],导致虽然信号长度出现了变化,但信号频谱并不会出现明显的改善,这就可能导致后续的无线定位结果出现偏差的问题,因此,需要对所有无线信号进行校正,其具体流程如下所示:
在进行校正的过程中,首先需要计算所有无线信号的相位补偿因子U0(m,k),其运算方程如下所示
U0(m,k)=[θ(m)-θ(1)]+2πB(m)[fa(k)-f1]/fs
(12)
其中,θ(m)-θ(1)代表所有无线信号间存在的相位差,2πB(m)[fa(k)-f1]/fs代表频率误差导致的相位差。
随后把M段修正后的频谱进行累加,获得

(13)
式(13)即相位修正之后的无线信号频率。
2.4 基于协方差矩阵的无线定位
2.4.1 无线信号传播时延的方差和均值计算
在无线信号传播过程中附加时延在不同的信道环境中服从指数分布,针对指数分布,其条件概率密度函数能够描述为

(14)
其中,τi,rms代表均方根时延扩展,能够描述成

(15)
式中,di代表无线信号的服务基站与传输平台间的传输距离,ξ代表服从0均值对数正态分布的随机分量。


(16)

(17)


(18)
能够计算得到τei的概率密度函数为
f(τei)=

(19)
通过计算获得τei的方差和均值

(20)

(21)
2.4.2 无线信号修正与定位
协方差矩阵算法在定位无线信号时存在较好的定位精度,原因是其把无线定位的误差包含在了加权矩阵内,在一定程度上抵消了定位误差带来的影响。但协方差矩阵只考虑了定位的误差,这使得矩阵在不同的信道环境下,存在一定的可能不会直接抵消附加时延带来的误差,因此本文通过式(22)对定位值进行修正,以剔除附加时延带来的误差。

(22)

1)假设在时间T中,共定位K组,每组M-1个定位值,通过协方差矩阵线获得一个初始的坐标估计。

3)对协方差矩阵进行计算:

(23)

3 实验证明
为了验证所提基于图谱分解和多信号融合的无线定位算法的有效性,进行实验验证。
实验环境为:无线定位算法实验在某单位大楼内进行,无线信号采集终端为一部HTC智能手机,操作系统为Android,整体无线信号的采集过程时间跨度为三个月。
为了证明所提方法的实用性进行收敛实验,迭代次数越少则方法的定位收敛性越高,稳定性越高,拟定纵轴为定位误差,横轴为迭代次数,其收敛性能如图2所示。
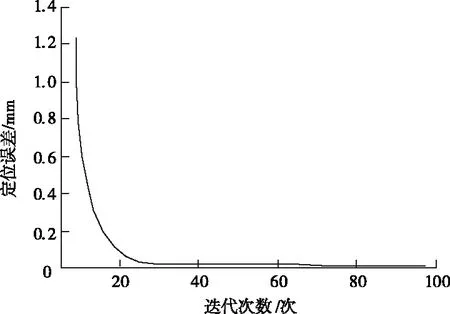
图2 所提算法收敛状况
通过图2能够看出,在迭代至28次时算法基本完成收敛,同时随着算法迭代次数的增加,定位误差无限趋近于零,能够在不同环境下进行有效的定位,不会因为外界干扰而影响方法精度和稳定性,收敛性能极佳。这是因为所提方法会对无线信号进行傅里叶变换,以修正信号的不连续性,以节约算法的迭代次数,从而提升算法的整体收敛效率。
为了进一步证明所提方法的优越性,在单位大楼内设置9个目标定位点,通过所提方法进行定位。因为方法只针对平面坐标,不考虑高度问题,所以图3内曲线为X、Y轴方向上定位误差。

图3 无线定位精度与无线信号密度测量结果
通过图3能够看出,所提方法定位不同位置的节点都会存在些许误差,但误差范围没有超出[5,-5]毫米区间,符合现实需求可忽略不计。因为所提方法依靠图谱分解方法,对不存在标记的信号数据进行标记,同时还会通过多信号融合对两相流进行测量,以明确信号密度,能够有效校正信号不连续问题,保持定位的精度。
4 结束语
为了实现无线信号的定位,提出一种基于图谱分解和多信号融合的无线定位算法,该算法通过多信号融合、图像分解算法与协方差矩阵实现对无线信号的定位。下一步研究的侧重点为无线定位高度问题。因为在实际环境内得到的有标记无线信号未记录目标高度信息,只能在二维平面上展现目标位置,在严峻环境下无法为研究人员提供更多的数据基础,为此尝试在算法中添加三维坐标定位,更加方便用户清晰了解目标所在位置,及相关信息,扩展应用于更为复杂多样的环境中。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
保定学院学报(2022年2期)2022-04-07 02:26:50
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:08
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
无线互联科技(2021年4期)2021-04-21 10:12:36
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:36
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:36
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
许昌学院学报(2018年4期)2018-05-02 12:27:37