基于NSCT及RT的遥感图像阴影消除方法
2022-06-14 10:07:24张国军
计算机仿真 2022年5期
刘 洋,张国军
(中国科学院大学微电子学院,北京 100000)
1 引言
为获取高空拍摄图像的某些特征,需进一步增强遥感图像质量。遥感技术最初广泛应用在军事中,后来成为一种普遍民用技术。特别是近年来,卫星向地面平台发送海量遥感影像信息,但大部分影像信息中掺杂了各类干扰因素,获取的遥感图像质量较差、对比度低、阴影问题明显,对实际应用造成严重影响。阴影是由于光照不足产生的,会导致图像真实信息丢失,对图像匹配、特征提取等工作带来负面影响。消除遥感图像中的阴影部分是通过各种方法,增强图像细节信息,且平衡图像亮度。处理后的图像既能够便于计算机处理,还能为后续操作奠定基础,因此阴影去除值得深入研究。
为此,文献[1]提出基于低尺度细节恢复的图像阴影消除方法。利用光照敏感多尺度图像分解方式,在不损失光照值前提下提取图像纹理特征;基于此,获取多尺度图像图层模板,利用模板与真实图像相匹配,引入边界复原子网过渡阴影的边界,得到纹理丰富的图像。文献[2]利用改进对数变换联合局部增强的图像阴影自动补偿方法。设计了改进的对数变换增强算法,建立变换模型,提升阴影区域亮度;结合局部补偿模型,做加权处理,改善对比度;利用阴影边界同类特征点实现阴影参数补偿。但是上述两种方法保留的细节与边缘信息不够完整,影响了阴影消除的最终效果。
基于此,本文提出基于NSCT算法及Retinex理论的遥感图像阴影消除方法。NSCT具备多尺度、多分辨率等特征,有效优化图像的细节保留效果。在Retinex理论中,目标可以被观测到的所有颜色信息取决于目标自身反射特征[3]与周围光强。因此Retinex的思路就是去除光照影响,保留目标原有属性,进而消除阴影部分。为验证所提方法的有效性,设计了一次仿真。实验结果验证了该方法的应用性能的优势。
2 基于彩色模型的遥感图像阴影区域检测
2.1 阴影类型与属性分析
阴影在遥感图像中普遍存在。按照阴影的形成原因,可将其划分为本影与透射阴影[4]两种。其中前者为物体自身没有被光源照射到的部位;后者为物体由于光源阻挡生成的背景部分。
在遥感图像中,阴影是由于太阳光照射导致的,本影并不明显,因此遥感图像中的阴影是指透射阴影。其具有如下属性:
1)具有低频特性:傅里叶变换使图像从空间域变换到频率域[5]中,阴影部位的亮度偏低,光线较弱,因此,阴影内的图像梯度偏低,因此具有低频特性。
2)亮度值低、饱和度较高:因为大气具有散射太阳光的功能,因为图像阴影部位的光线为蓝紫色光,此类光线具有波长较短特征,所以阴影部分的颜色饱和度较高。
3)阴影部分颜色具有稳定特征:一些颜色特征在阴影区域中比较稳定,不会随成像条件的改变而发生改变。
4)阴影部分的红、绿光波会急剧减少,使蓝红光与蓝绿光的相关性减小。
2.2 阴影区域检测
1)HSV彩色空间
HSV[6]可体现出人类视觉观察色彩方式。HSV彩色空间是在柱坐标系基础上将RGB(Red Green Blue,红绿蓝)映射到HSV中,利用下述方程表示:

(1)
式中

(2)
2)C1C2C3彩色空间
在一些彩色空间内,阴影部分的色彩特性不会随着光照的改变而改变,因此本文利用一种彩色特征不变的C1C2C3空间实现图像空间转换

(3)
3)检测过程
HSV-C1C2C3彩色空间阴影检测方法即为对两个空间的检测区域进行计算,若某一部分在两种空间中均被认定为阴影区域,则该部分就是阴影区域,反之将其作为亮度较低区域。
基于以上内容,阴影检测步骤如下:
步骤一:获取色调分量H、饱和度S以及亮度V;
步骤二:通过光谱比方式,设定M=(S-V)/(H+S+V),获得比值图像,加强阴影部分色调、亮度与饱和度等特征;
步骤三:选取图像分割阈值,完成图像分割处理,获得初步阴影部分;
步骤四:对分割后的遥感图像做滤波处理,选出备选阴影部分;
步骤五:使遥感图像从RGB空间引入到C1C2C3空间内,获取C3分量图,同时从RGB空间内获得B分量;
步骤六:对上述获得的两个分量图做阈值分析,确定双阈值检测结果;
步骤七:将步骤四与步骤六的结果做重合处理,得到最终的阴影区域。
3 遥感图像阴影消除
3.1 基于NSCT的遥感图像去噪
1)NSCT分解
Contourlet变换为多分辨率、多方向的多尺度分析方法,改善了小波无法高精度获取图像边缘信息的不足。但是此种方法不具备平移不变性[7],此种特征对图像处理的效果产生较大影响,图像在空间域进行平移时,Contourlet变换系数会出现改变,造成去噪后的图像边缘会发生伪吉布斯现象。为使其具备平移不变性,本文利用NSCT方法对其改进,将图像分解为低频与高频两个区域,其中高频部分被划分成多个频率子带,达到多方向分解目的;又将低频细分为高频与低频区域,实现更加细致的轮廓分割。图1为NSCT分解过程,经过分解的图像尺寸不发生改变。

图1 NSCT分解过程
2)低频系数调节
通过NSCT分解后,一些低频分量中会存在负数,对图像的清晰度产生严重影响,因此需对低频分量进行线性增强操作[8]。获得图像的最大像素值Xmax与最小像素值Xmin,再通过线性映射函数将灰度区间[Xmin,Xmax]映射在[0,255]中,则线性增强函数表示为
y=f(x)=255*(x-xmin)/(xmax-xmin)
(4)
3)高频系数处理
NSCT变换之后,高频区域与图像边缘、细节及大多数噪声相对应。描述图像细节的NSTC系数会由于尺度分解逐渐处于稳定状态,而表示噪声的NSCT系数会呈现出指数下降趋势。针对高于阈值的NSCT系数,将其作为有用信息保留,而低于阈值的系数,将其作为噪声并置0。

(5)
式中,Zj,k(m,n)表示j尺度,方向k的NSCT系数。针对Tj,k(m,n),利用Visu Shrinkage阈值法
(6)
式中,N描述NSCT分解系数总数量。
(7)


(8)
建立能量函数如下

(9)


(10)
在进行高频系数处理时,选取的阈值综合考虑了不同尺度与相同尺度的噪声特性,因此最终确定的阈值可以有效过滤噪声,保留更多图像自身信息,更有利于影像消除操作。
3.2 基于Retinex理论的图像阴影消除
由光学理论可知,通常到达视网膜的颜色信号为入射光强和场景内任意一点表面反射率的乘积,利用下述公式表示
I(x,y)=R(x,y)·L(x,y)
(11)
式中,R(x,y)代表某一颜色像素(x,y)点的反射率,L(x,y)表示对应像素点处入射光强,I(x,y)则描述图像像素值。
由此可知图像像素值取决于入射光与物体反射率。在这一理论基础上,Retinex对图像I进行分解,分为光照图像L和反射图像R,这两个图像相互独立。通过减少光照影响来恢复由于光线改变丢失的信息,进而增强图像。具体过程如下。
3.2.1 单尺度Retunex算法
单尺度Retinex算法可表述为:
Ri(x,y)=lgIi(x,y)-log[F(x,y)*Ii(x,y)]
(12)
式中,Ii(x,y)代表输入图像中第i个色彩通道,*为卷积运算符号,Ri(x,y)是Retinex的输出结果,F(x,y)表示高斯函数[9],计算公式如下

(13)
式中,σ2代表概率分布标准差,属于高斯滤波器的参数,r为滤波器模板半径。
3.2.2 自适应单尺度Retinex理论
由上述可知单尺度Retinex方法必须经过人工设置参数,图像增强的效果通常与人工经验有关。
由于单尺度Retinex方法只存在一个σ2个参数,只要可以自动设置σ2,即可提高该算法的自适应性。结合以往经验,通常将高斯模板半径的值设置为r=80,但该值仅为经验值,并不代表适用于全部情况。
通过高斯滤波器进行平滑的主要作用是获得低通滤波遥感图像。为提高图像均衡化程度,将整幅图像灰度均值当作高斯函数尺度。
由于高斯滤波器属于线性平滑滤波器[10],利用持续窗函数内像素加权即可达到平滑目的。结合高斯函数特性可知,平滑程度随参数σ2的增大而增大。因此σ2的计算问题就是判定当前像素点对图像平滑程度的问题。
设定图像灰度均值为M,I′(x,y)为坐标(x,y)点的灰度值,row×col代表图像的像素。那么,图像平均灰度为

(14)
若整幅图像完全平滑时,即全部点灰度值都相同时,满足式(15)的等式条件
R=W′(a,b)
(15)
详细过程如下:
步骤一:将式(15)两端取对数,同时将入射与反射光分量描述为和的形式,如下
logR=logW′(a,b)=logR(a,b)+logL(a,b)
(16)
步骤二:利用高斯模板实现初始图像的卷积,得到较大噪声的图像maxZ(a,b),假设高斯函数f(a,b),此时有:
minZ(a,b)=W(a,b)*f(a,b)
(17)
步骤三:在对数域内,利用初始图像与滤波后的图像进行差值运算,得到无阴影图像Q(a,b)为
Ret(x,y)=logI(x,y)-maxZ(a,b)
(18)
由于像素值为0时,对数不存在实际意义,因此可令全部灰度值是0的像素值为1。
4 仿真设计与研究
为证明本文方法对遥感图形阴影消除的效果,进行仿真。利用不同算法测试归一化植被指数(NDVI)。该指标值越高,说明图像对应区域的光照较好。不同方法的平均NDVI值具体测试结果如表1。
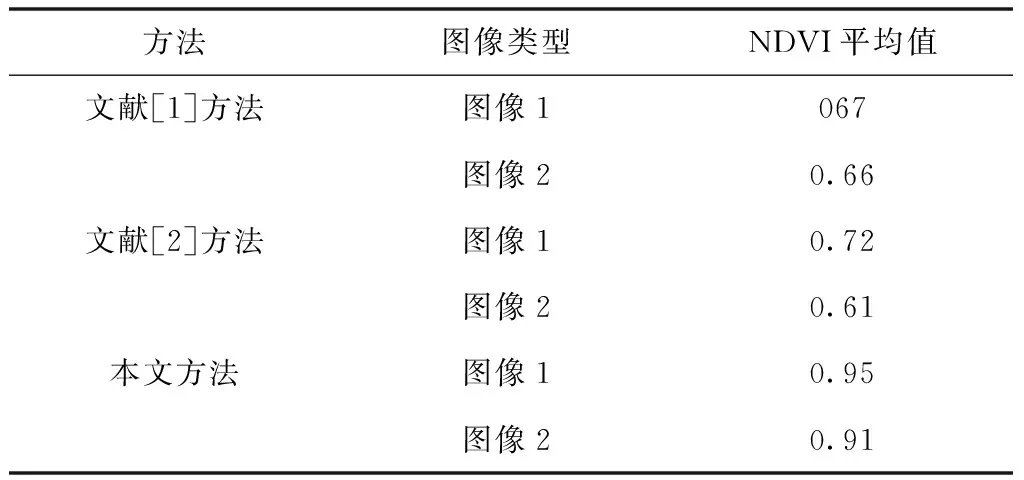
表1 不同方法NDVI值表
由表1能够看出,本文阴影检测方法的平均NDVI值明显高于对比方法,说明本文方法下遥感图像具有全面较好的光照,去除了阴影。
在阴影消除效果的仿真中,为更加合理地对本文方法进行评价,将清晰度、均值和标准差当作评价指标,其计算公式分别为。


(19)
式中,x′(i′,j′)代表遥感图像像素值,(M′N′)为图像大小。该值越大表明图像越清晰。

(20)
均值能够体现出图像亮度,实际应用中均值为128左右,低于该值说明图像较暗,高于该值,证明图像越亮。

(21)
标准差描述了图像整体对比度,该值越大,整体对比度越高。

表2 不同方法阴影去除后的图像质量对比表
为进一步验证所提方法的有效性,利用不同方法处理遥感图像,所得结果如图2。

图2 不同方法阴影消除效果对比图
由表2和图2可知,利用本文方法消除阴影后的图像无论是在清晰度、均值还是标准差方面均具有绝对优势,获得了较强的图像增强效果。这是由于本文首先使用了去噪方法,最大程度保留图像原始信息,同时本文的Retinex方法具有自适应性,可以减少人工干预,获得更加理想效果。
5 结论
本文提出基于NSCT算法及Retinex理论的遥感图像阴影消除方法。利用彩色空间转换方法检测出阴影区域,通过NSCT算法保留图像细节信息,最后对Retinex理论进行改进,获取增强后的图像,有效消除阴影区域。仿真结果表明:该方法能够提高图像质量,提高清晰度。虽然提出的方法在图像增强方面确定一定效果,但是NSCT方法计算量较大,时效性不足,因此在今后研究中需对其作出改进。
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
自动化学报(2017年5期)2017-05-14 06:20:56
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
光学精密工程(2016年1期)2016-11-07 09:01:59
数学大王·中高年级(2016年4期)2016-05-14 12:56:02