
柔性触觉传感器的研究进展与展望
2022-06-11 09:47:00陈瑀珣苑恒轶
吉林工程技术师范学院学报 2022年2期
陈瑀珣,李 毅,苑恒轶
(吉林工程技术师范学院,吉林 长春 130052)
肢体触觉又称触感,是人体皮肤与物体接触时产生的感觉,一般是物体硬度、温度、湿度、粗糙度、振动频率、触觉压力等诸多物理特性的综合反馈。随着传感器的不断完善,这种与人类相似的皮肤触觉系统可以覆盖机器人的表面,执行各种人类涉及以及不可轻易涉及的任务[1]。灵感来源于对天然荷叶的疏水性和壁虎强大的攀爬能力,利用仿生物的方法制备了许多具有独特天然生物结构的不规则微纳结构,并将其应用到柔性触觉传感器中,使得新型柔性触觉传感器具有良好的综合性能[2]。
柔性触觉传感器被称为“拥有仿生智能皮肤的机器人”以及“电子皮肤机器人”。由于为了可以实施一些特殊的任务所以此传感器具有一些特殊的功能,相对于传统的传感器相比,它不仅可以检测物体特性,而且还具有感受不同的接触力、冷热度、潮湿度、震动频率的功能。柔性触觉传感器的基本材料是微纳米线、金属合金以及碳纳米管。随着智能手机、台式以及手提电脑、智能家用电器、各种寓教于乐设施等日常服务设施的普及和发展,其种类也随之增多。“有形革命”是一个智能场景,人们对柔性触觉传感器的需求越来越强烈,例如,类似于人体皮肤的电子皮肤对人体健康数据的改变是由脉搏、心跳、体温、肌肉群振动等实时人体生理健康指标引起的。因此,对柔性触觉传感器进行研究不仅会促进机器人自身的控制系统的发展,也会促进商业娱乐、智能医学、军事保密和航空航天等领域的发展[3]。
一、常用柔性触觉传感器的特点与分类
(一)柔性触觉传感器的特点
柔性触觉传感器是使用符合规格的柔性材料所制成的传感器,其具有高灵敏度、高柔韧性、响应速度快、延展性高甚至可以自由弯曲折叠。结构形式具有可选择性,它可以根据不同要求的各种测量条件而进行变换,可以轻松便捷的对较复杂的被测目标快速检测[4]。除了刚性触觉传感器的特点外,还具有柔软可弯曲、重量轻、强大的可扩展性、高分辨率等特点。 这完全解决了刚性传感器的低灵活性,低灵敏度,弱稳定性,慢响应时间等问题。柔性触觉传感器由于其具有便于携带或覆盖在机器人身体的不规则非平面表面的特点,并且可以清楚感知到周围环境里微弱信号的变化。新型柔性触觉传感器广泛应用在电子皮肤、智能医疗、体育器材、纺织行业、航空航天、环境勘测等领域[5]。
1.柔性触觉传感器兼顾高柔性、高弹性及延展性。美国斯坦福大学 Zhenan Bao 的研究小组 Lipomi团队将碳纳米管固定在PDMS基底板上,以此提供传感器容量触觉的一致性和良好的弹性以及透明度[6]。因为PDMS透明度高且弹性极好,因此其牵引比可达到100%。如前所述,双碳纳米管与弹性材料结合,为了保障整体弹性结构,因此设计出网状结构来确保微丝的膨胀性能、导电性和弹性材料的伸长率。该阵列传感器可以检测正负压力和拉伸强度,但由于总体的表达和伸长率会使冷凝信号发生改变,因此它只能进行单独的测量或以一定的拉伸速度来测量。
北京科技大学曹建国课题组汪浩鹏等人提出了一种基于“多孔PDMS”和AgNWs/PDMS的新方法[7],使用具有优异的导电性与尺寸的纳米银线来制作传感器,该多层“三明治”结构,如图1所示,采用纳米复合电极所制成的压力传感器阵列融合了现代先进的制造技术,如纳米制造、氧离子体处理、蒸发电子束、3D打印技术与abaqus仿真技术。首先,用于制备基于纳米复合材料的柔性导体电极系统;其次由柔性材料以及力敏可压橡胶电阻制作而成的压力传感器阵列;开发了一种新形式即多层三明治夹层式柔性压力传感器阵列结构,同时加以薄金属层用来制作成电子皮肤触觉阵列传感器;最后,对传感器进行射线封装、组装和切割,使其具有良好的拓展性。一种新型使用银纳米线制作而成的复合膜是一种多层“三明治”夹层式结构电子皮肤触觉传感器,是一个完整的电子皮肤触觉阵列传感器并具有高柔特性的表现。这种电子皮肤传感器不仅兼有高柔性与高弹性两种特性,同时该传感器也可以实现在高精度范围0~180 kPa进行测量。该传感器可以进行各种物体表面或人体关节活动的动态测量,其形成了在复杂三维环境中使用高度灵活的触觉传感器的基础,为实现高度灵活的触觉传感器以及机器人和其他载体的智能化提供了一种新方法。

图1 纳米银线制作而成的新型“三明治”结构电子皮肤触觉传感器及其柔弹性展示
德国比勒费尔德大学 Gereon 等通过可导电针织物来实现了良好的灵活性,并且将许多触觉传感单元插入单个传感器隔膜中,它可以用来覆盖各种形状的物体[8]。
2.柔性触觉传感器的高灵敏度。灵敏度 S 是电子皮肤触觉传感器的重要性能参数,可表示为
S = δ(ΔC / C0 ) / δp
(1)
ΔC = C - C0
(2)
式中: C0为额定压力下所产生的电容值或电阻值;p为所施加的作用力;C为施加压力后的所产生的电容值或电阻值。
Zhenan Bao 课题组Tee和Benight团队制作出一种灵敏度高、应用范围广的电子皮肤,其采用的原理是利用可自愈合的复合材料从而达到良好的导电性能。2014年,Pan 团队开发了一种压阻式触觉传感器,如图2所示。通过改进传统传感器的形状与性质,采用空心球微结构的压阻式锯齿薄板技术,使其可以最小检测压力可以达到小于1 Pa;在低压区<30 Pa时具有-57.0~133.2 kPa-1的极高灵敏度; 在<100 Pa 的压力范围内仍然具有7.8~41.8 kPa-1的高灵敏度。由于该传感器的响应时间约为50 ms,所以可实现微压检测。
国立首尔大学Joo团队成功研发出一种以将银纳米线附着于PDMS形式的电容式柔性压力触觉传感器,该传感器可以提供具有多维结构的弹性电极[9],该传感器能检测到的最小质量为0.04 g,与此相对应的受压作用力为15 Pa。而对于此传感器的灵敏度而言,在50~500 Pa的低压区时灵敏度为3.78 kPa-1,在0.5~2.5 kPa的中压区时灵敏度为0.80 kPa-1,在2.5~4.5 kPa的高压区时灵敏度为0.35 kPa-1。台湾大学Lai团队使用由银纳米线在PDMS薄膜上固化形成相应的电极,从而制作出一种柔性电容式压力控制传感器,该传感器在0.59 Pa~3. 0 kPa的低压范围内可以达到超高的灵敏度1.0×104~6.6 ×106 kPa-1。

(a)空心球微结构示意图 (b)固化成型的锯齿形结构 (c)传感器的响应测试 图2 基于自愈合导电压阻复合材料和空心球微结构的压阻式触觉传感器阵列
韩国先进科学技术研究所的KAIST Park研究小组的Morteza等人基于银纳米线和 PDMS 弹性体,通过第一层采用PDMS材料、第二层采用银纳米线材料、第三层采用PDMS材料的三明治结构,制作了一种可以方便快捷地检测手指运动的电子皮肤弹性压阻式应变触觉传感器[10],允许手指通过PDMS银纳米线的夹层结构移动,PDMS在0°~120°的弯曲角度范围内具有良好的灵敏度,弯曲约为0.634 rad-1,并且具有弹性好、性能稳定和生产成本低等特点。
(二)柔性触觉传感器的分类
柔性触觉传感器种类较多,所以其分类方式也多样化。根据其工作原理分类可以分为四种:压阻式、压电式、电容式和光电式等。根据其用途分类可以简单分为柔性压力传感器、柔性应变传感器、柔性湿度传感器、柔性气体传感器、柔性温度传感器、柔性热流量传感器和柔性磁阻抗传感器等[11];现阶段根据使用频次情况,对于比较常用的包括压阻式触觉传感器、压电式触觉传感器和电容式触觉传感器三类传感器的研究进展进行简单介绍。
二、常用新型柔性触觉传感器
(一)压阻式传感器
压电触觉传感器通常由压阻材料制造而成,通过其产生介电效应用以工作。例如,金属合金和力敏感导电橡胶。压阻效应又称压敏电阻效应是指改变大部分压敏材料的表面作用力,改变其对某些变化的电阻率。 当触觉传感器的表面受到作用力时,通过检测电阻器阵列中的两个相邻或相对电极之间电阻值的变化量来改变相应地传感器中的内部压敏材料的电阻率。它可以获得与被测量物体接触表面之间压力的大小,如图3所示。
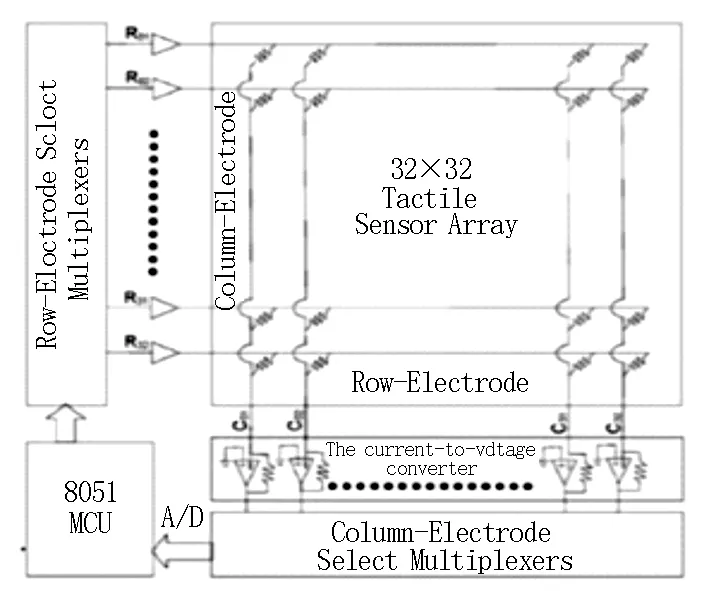
图3 压阻式触觉传感器的信号检测原理
韩国延世大学的Eun-Soo Hwang团队通过使用MEMS制造工艺加工PI和PDMS材料,成功的研究开发了一种灵活的触觉传感器,该传感器是用于测量三维力的简单捷径,如图4所示。该传感器的优点可以囊括为柔性极好、量程大。然而,仍然存在许多不足,例如触觉传感器的内部构造及其复杂会影响其工作过程、传感器的灵敏度过低。;美国明尼苏达大学的 Debao Zhou团队成功开发研制出一种新型有夹层的三明治结构压阻式触觉传感器,该传感器是通过使用纳米银线与PDMS材料结合而产生的压阻效应进行工作,如图5所示。这种触觉传感器不仅易于处理并且具有很强的可靠性;中国科学院的葛运建团队成功研发设计出一种新型结构的传感器,其工作原理为导电橡胶产生的压阻效应,该传感器可以方便快捷地测量三维力,并通过仿真可以验证出已经提出的柔性传感器结构可以满足一系列人工机器人进行智能操作的基本需求[12]。

图4 Hwang 团队研制的一种触觉传感器
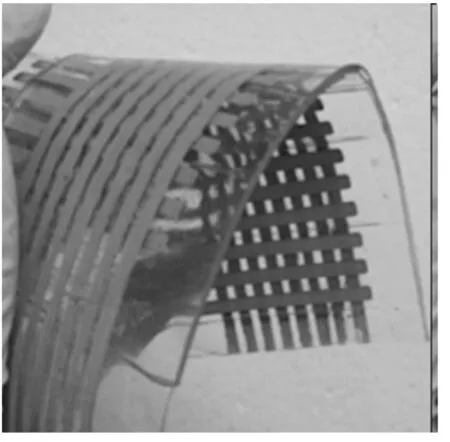
图5 Zhou 团队研制的触觉传感器
总之,压阻式柔性传感器具有使用负载高、寿命长等优点。但是仍然存在很多不足之处,它的迟滞温漂略大,空间分辨率较低且线性度极差,这些问题都限制了它的应用范围,使其适用范围存在很大的局限性。
(二)压电式传感器
压电式触觉传感器通常是由压电材料制作而成,压电材料所产生的压电效应是指传感器内部产生的极化效应。如果作用在中间表面上的外力方向是恒定的,则中间以外的两个表面产生相反的正张力和负张力,柔性触觉传感器的压电材料主要是聚氯乙烯(PVDF),当触觉传感器在不同位置受到不同的力时,PVDF的载荷是不同的。该检测电路能够准确地确定在不同接触元件位置产生的负载量究竟具体量,并且可以快捷的计算出所处的适当位置所受到外力作用的大小。
意大利理工学院的Lucia seminara利用FPCB表面的PVDF薄膜用来作为一个完整的保护层作用,在制作传感器时采用橡胶材料来制作,可以使每个项目都可以形成压电触觉传感器阵列,如图6所示。它具有动态覆盖和灵活性的优点,但稳定性较差[13];日本佐贺大学的 Akira Kimoto 团队制作出由PDVF材料制成的柔性触觉传感器,该传感器可以简洁快速的测量由PVDF和热电效应产生的负载,测量了多层PVDF光伏薄膜的超声容量和传播时间,计算了压力、温度、振动频率等参数;韩国延世大学的M.S.Kim等人使用可控膨胀过程,为了扩展PVDF膜将加工材料制作成半球形结构,并加工出一种4×4传感器阵列,如图7所示。该项目可以减少接触元件之间的相互作用,提高传感器的灵敏度和稳定性。这种设计所制成的传感器可以测量传感器表面的作用力;燕山大学的陈卫东团队设计了一种基于聚氟乙烯(PVDF)的三维式仿生机器人触觉传感器,成功地建立了压电式柔性传感器的有限元计算模型,并通过分析计算验证了设计方法的合理性。成功研制开发出基于三维机器人的触觉传感器,验证了该方案的可行性[14]。

图6 Lucia 团队研制的触觉传感器
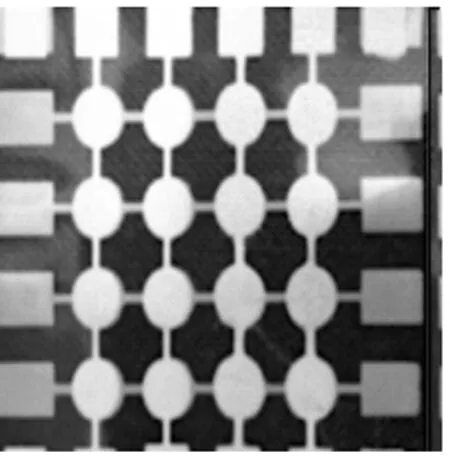
图7 M.S. Kim 团队研制的触觉传感器
由于压电式传感器无法区分敏感材料的压电效应与热电效应之间的差异。温度变化快,流动循环复杂且不稳定,但是具有很宽的动态范围。
(三)电容式传感器
电容式触觉传感器的结构大部分会使用多层膜结构,如图8所示,此传感器的内部分为三部分,上层和下层是正交导体的电极,中间层是由适当的电介质将上层与下层分隔开。这种方法有助于在传感器的敏感表面与被测物体接触时,在上、下两层膜之间的距离不同的情况下,在上、下两个点形成一个强烈的凝聚集。这会导致其电容值发生变化,从而可以轻易地计算出表面上的外力,并且可以准确的获得接触表面的各种数据。
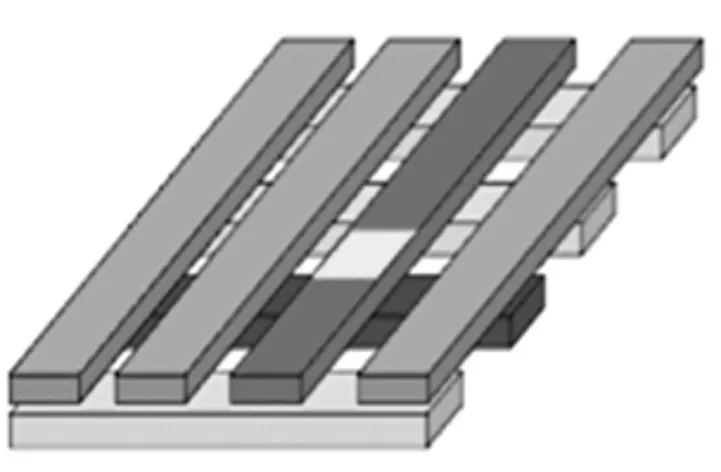
图8 电容式触觉传感器结构示意图
中国台湾大学的 M.Y.Cheng团队成功研发出一种新型的柔性传感器,该传感器采用浮动电极式原理,并且根据它的特性从而加工出一款形式为 8×8 的阵列[15],如图9所示,该传感器不单单是柔韧性良好,而且该传感器的结构非常简单,灵敏度也很高。它可以在测试其他物体表面形状时可以快速准确地检测出结果。对于它来说有利也有弊,仍然存在一些不足之处,该传感器的稳定性较差。针对此缺点在随后研究中,Cheng团队等人就将传感器中的四个触元均封装到一个区域,并且在区域的中间位置使用圆柱体材料使其相隔开,这种新的改进方法不仅可以用来测量正压力,还可以用来测量剪切力;明尼苏达大学的H.K.Le研究小组开发了一种电容式柔性传感器,基本的PDMS材料可以用作结构材料达到为传感器扩展空间的作用。如图10所示,用该方法设计制成的触觉传感器不仅柔韧性高,而且具有空间分辨率高、加工方法简单、灵敏度高等优点。但此传感器不乏也有存在着测量间隔较短的不足之处。在随后的一项研究中,Lee和Peng的团队集合了触觉单元中的四种触觉原件,并使用PDMS材料所制成的圆柱介体将它们相互分开。此外,传感器能够探测到被测物体的表面形状[16];美国田纳西大学的艾米莉·普里特卡德(Emily Pritcard)使用光刻电极在聚酰亚胺薄膜中开发了一种多层触觉传感器,如图11所示,该传感器加工方法简单、测量范围广,但是也包含很多的缺点如灵敏度低、弯曲过程中电极退化小等,香港市立大学 H.Z. Zhang 团队基于ITO/PET材料,使用PDMS材料制备新型柔性应变传感器,使其具有高灵敏度、加工方法简单、柔软性好、高透明度等优点。
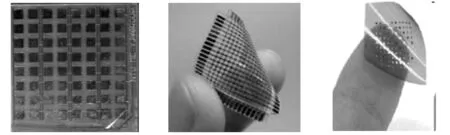
图9 M.Y.Cheng 团队研制的触觉传感器 图10 Lee团队研制的触觉传感器 图11 Emily团队研制的触觉传感器
综上所述,电容器触觉传感器具有宽动态范围,小温度漂移,并且信号处理电路简单,但易于受影响于噪声和寄生电容,并且空间分辨率差,需要改善。
三、结语
柔性触觉传感器结构形式多样且灵活,其可根据不同的测量条件要求来任意布置,能够准确快速地测量出特定环境和特定信号,轻便快捷的解决了传感器小型化、集成化、智能化发展的问题。近年来,新型柔性触觉传感器在电子皮肤、便携式电子产品、生物医学和航天航空等领域得到了广泛的应用。近来虽然触觉传感技术有了一定的发展,但仍然存在一些不足问题,还有大部分研究成果均处于实验室阶段。如果要用科学技术的发展来要求柔性触觉传感器应用于各种特殊环境中,这就要严格要求柔性触觉传感器智能化与柔性化相结合。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30 07:22:08
石油沥青(2021年5期)2021-12-02 03:21:18
海外星云(2021年6期)2021-10-14 07:20:42
文化创新比较研究(2020年7期)2021-01-13 09:10:48
制造技术与机床(2018年12期)2018-12-23 02:40:50
特别健康(2018年3期)2018-07-04 00:40:20
成都信息工程大学学报(2017年1期)2017-07-21 14:14:11
工业设计(2016年4期)2016-05-04 04:00:20
探测与控制学报(2015年4期)2015-12-15 15:00:48
中外健康文摘B版(2014年8期)2014-06-27 06:33:03
