考虑约束的高超声速飞行器制导与控制一体化设计
2022-06-10 09:39:08齐瑞云
宇航学报 2022年5期
唐 建,齐瑞云,姜 斌
(1. 南京航空航天大学自动化学院,南京 211106;2. 南京航空航天大学先进飞行器导航、控制与健康管理工业和信息化部重点实验室,南京 211106)
0 引 言
高超声速飞行器作为一种航天与航空的综合产物,具有隐身性能好,飞行速度快,打击范围广,打击目标能力强等优点。近年来,随着其军用、民用价值的持续凸显,作为其核心技术之一的制导与控制系统设计也吸引了越来越多研究人员的关注。不同于一般低速飞行器,当高超声速飞行器处于高超声速飞行状态时,控制回路时间常数远小于制导回路时间常数的假设将难以保证,造成了传统上基于频谱分离假设进行制导与控制系统分回路设计控制器,再通过联合调试使其协调匹配的方法容易出现终端精度下降甚至飞行器失控的现象。针对上述问题,Williams等提出了制导与控制一体化设计思想。
制导与控制一体化设计,是指能够根据飞行器质心和绕质心状态直接产生执行机构控制指令并同时完成飞行器质心制导和绕质心姿控任务的一种设计理念。这种理念能够充分利用制导与控制回路之间的耦合关系,将飞行控制系统作为一个整体进行设计,具有如下优点:
1)不再基于频谱分离假设,能够提高系统可靠性;
2)能够充分利用系统中存在的各种耦合,从而整体上提高系统性能;
3)避免传统设计方式中反复联合调试的问题,降低设计成本。
正是由于制导与控制一体化设计有着这些优点,自其被提出以来,不断有学者提出基于各种各样控制理论的一体化设计方法。例如,反馈线性化、轨迹线性化、小增益定理、滑模控制、最优控制、状态依赖Riccati方程法、反步法、自适应控制以及H∞控制等。
尽管如此,当下的研究仍然存在一些问题。首先,就一体化设计方法来说,很多研究都采用了分通道设计的思路,即将三维运动分解为纵向和横侧向两个通道,再分别进行设计,从而将三维一体化设计简化为两个单通道设计,而现有研究成果中,更是以纵向运动平面为主,如文献[18-20]。不难发现,分通道设计的基础在于对通道间运动关系耦合的忽略,这种忽略在实际中并不合理,在理论上也造成了一体化控制器不能真正考虑飞行器的耦合关系。
其次,当前的制导控制一体化研究大都关注于飞行器的质心跟踪问题,即设计一体化控制器通过控制舵面偏转或三轴控制力矩来直接实现飞行器对期望轨迹的追踪。换言之,当前的制导与控制一体化研究更加偏向控制问题,即输出追踪问题,而很少考虑制导问题,因此这类一体化控制严格上说只能称之为质心/绕心运动一体化控制。而制导问题在飞行器飞行中不仅包括质心追踪,还包括飞行器的安全问题。虽然有些文献会加入对状态约束的考虑,但它们大多仍然是简单的常值状态约束,而非制导问题中极具代表性的过程约束。
最后,就一体化设计的应用来说,目前的研究对象以导弹居多,飞行阶段以俯冲段居多,而对于高超声速飞行器上升段的研究则相对较少。诚然,一般来说飞行器在再入段或末段都能具有极大的速度,此时进行一体化设计完全符合设计初衷。然而,对于高超声速飞行器来说,其速度往往在上升段就能进入高超声速,此时频谱分离假设条件能否成立已然成疑,再考虑到上升段对后续飞行阶段的重要影响,因此进行适用于上升段的制导控制一体化设计的意义更加不应被忽视。
鉴于这样的考虑,本文针对高超声速飞行器上升段飞行,提出了一种结合级联控制、控制障碍函数的新型三维制导控制一体化算法,解决了过程约束下的三维一体化控制问题。首先通过对速度子系统设计控制障碍函数约束算法来满足飞行器的过程约束要求,然后利用反步法、动态逆控制设计其余子系统的控制器,两者共同组成制导控制一体化控制器。考虑到飞行器在上升过程中容易遭遇阵风扰动的问题,设计非线性干扰观测器以增强算法的鲁棒性。最后通过李雅普诺夫函数证明了系统的稳定性,并且通过仿真验证了该新算法能够在满足高超声速飞行器上升段过程约束的同时,实现飞行器的三维跟踪控制。相比于过去不考虑约束或者仅考虑状态约束的一体化控制设计,本文所提出的算法更加具有实际意义。
1 模型及问题描述
本文参考文献[21]中对高超声速飞行器的建模方法,在下列假设的基础上,对其进行适当的转化,建立高超声速飞行器三维制导控制一体化模型。
忽略高超声速飞行器舵面对气动力的影响,仅将其视为影响气动力矩的执行机构。因为高超声速飞行器本身气动舵面较小,其气动力主要来源于机体。
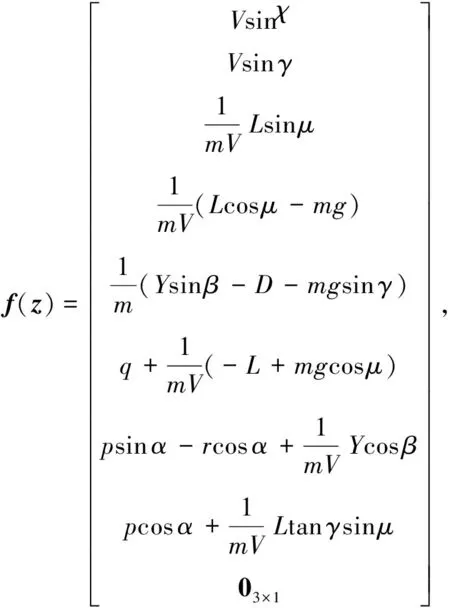
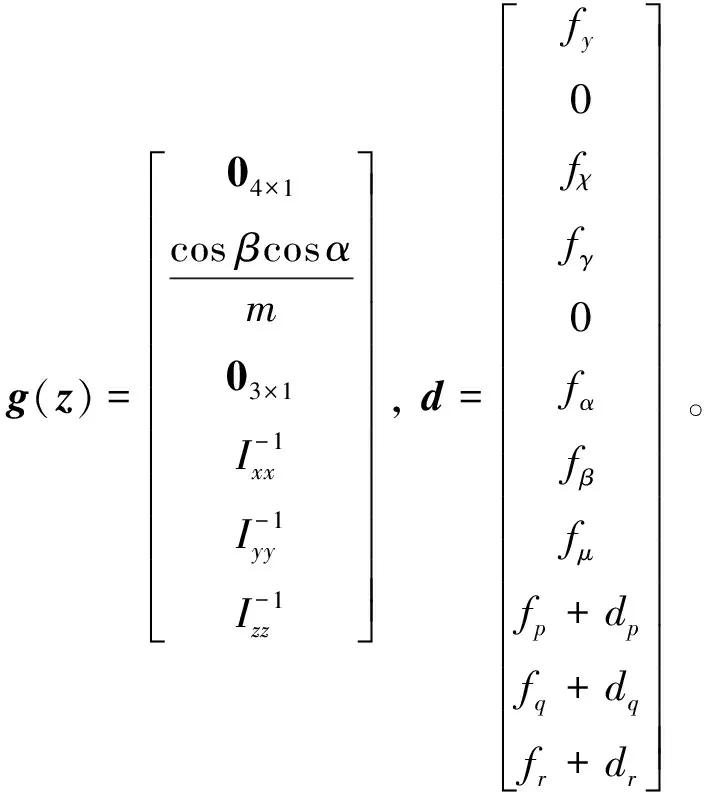
在省略纵向移动距离的动态方程后,高超声速飞行器六自由度控制系统可由以下三个子系统表示:
1)子系统1
该系统的任务在于调节速度,是一个单输入单输出一阶系统,如式(1)所示:

(1)
2)子系统2
该系统目标是控制飞行器横向、纵向移动,是一个由四组一阶系统构成的多输入多输出系统,如式(2)~(5)所示:
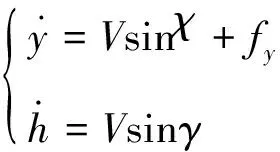
(2)
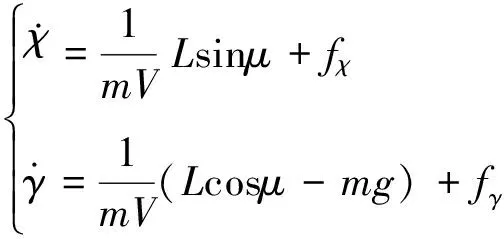
(3)
(4)
(5)
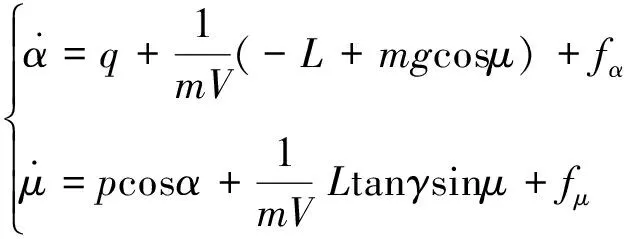
3)子系统3
该系统的作用是控制飞行器的侧滑角始终保持在零附近,由两级单输入单输出系统组成,如式(6)~(7)所示:

(6)

(7)
式(2)~(7)中:


sinsin+coscos+sin),

sinsincos)-sincos+cos-cos],




tansin)+tancoscos-costancos·
sin+tan-coscostan],




外部扰动,,及其导数均连续有界。
本文以,,以及作为控制输入,,,作为输出,同时高超声速飞行器以零侧滑模式机动,要求保持在零附近。
本文采用文献[24]提供的气动模型,可写为如下简便形式:

(8)
结合假设1及文献[24],升力、阻力以及侧力系数可以分别表示为如下形式:
(9)
式中:为马赫数。
高超声速飞行器上升段飞行由于燃料消耗显著,所以始终会伴随着质量、转动惯量的变化,其模型如下:
(10)
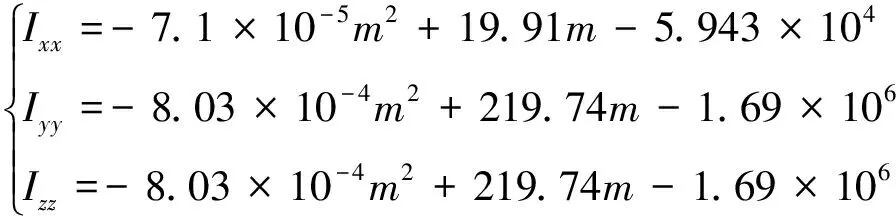
(11)
为了保证飞行器的安全性,整个飞行过程都应满足过程约束条件。文献[25]指出在高超声速飞行器上升段飞行中有三个最关心的过程约束,分别为弯矩、轴向推力加速度以及动压:

(12)
≤max
(13)
(14)

观察式(12)~(14)可发现,一方面,不等式约束(12)、(14)均与速度有关,另一方面,约束(13)可以理解为对的约束,而恰恰是的控制输入。因此,可以针对的动态方程添加约束算法,从而同时满足飞行器上升段的过程约束。
式(1)~(7)给出了六自由度高超声速飞行器模型,相比于文献[21]中的模型,转化后的模型只是在表达方式上进行了简化,实际的动态关系并没有发生变化。模型经过转化后,动态关系更加明确,方便了后续控制器的设计工作。然而,高超声速飞行器的运动受升力影响,其控制必然也要参考升力模型,而文献[24]提供的升力系数拟合函数过于复杂,不利于展开控制器的设计。因此,本文还利用最小平方逼近,对拟合函数进行简化,以适应控制器的设计需要。经过逼近,可改写为如下形式:

(15)
式中:,,均为常数;Δ表示升力系数逼近误差造成的升力误差。升力系数逼近误差如图1所示。由图可见,逼近误差能够保持在一个合理的范围内。
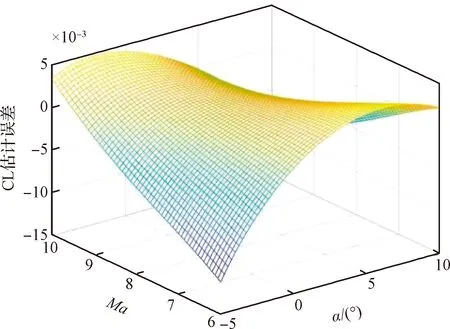
图1 升力系数估计误差Fig.1 Estimated errors of the lift coefficient
经过对系统模型的转化以及对升力系数的简化之后,即可展开基于六自由度高超声速飞行器的考虑约束的制导与控制一体化设计。
2 控制器设计
完整的六自由度高超声速飞行器模型具有高阶次、强耦合、强非线性的特点,如何能够在实现输出稳定跟踪的同时满足过程约束便成为了控制器设计的重点。
通过观察可以发现,制导控制一体化设计模型可以抽象为一类下三角形式的高阶多维级联系统,因此,反步法作为一种强大的适用于高阶非线性系统的控制方法,在高超声速飞行器控制中得到了广泛的应用,例如,文献[26]就通过反步法设计了高超声速飞行器纵向平面输出追踪控制器。然而,单纯的反步法无法保证系统稳定跟踪的同时满足飞行器的过程约束条件。为此,需要为一体化控制器添加约束算法,从而得到能够满足过程约束条件的制导控制一体化控制器。
2.1 一体化控制器设计
本文以反步动态逆控制为基础,对各子系统进行分级设计。非线性动态逆方法是飞行器非线性控制的一种有效方法,其实质是用非线性逆和非线性函数对消被控对象的非线性,因此在处理强非线性、强耦合系统时其能具有较好的控制效果。
系统输出期望及其直至2阶的导数均连续、有界。
1)子系统1
该系统以为输入,为输出。通过对约束(12)~(14)的分析可知,飞行器过程约束均可以通过对该系统的设计来完成。因此,速度子系统的控制目标包括速度追踪以及过程约束两个部分。
最近的研究表明,通过引入控制障碍函数,可以使得许多基于李雅普诺夫函数或控制李雅普诺夫函数的控制技术良好地解决安全问题,而本文提出的一体化控制器正是基于李雅普诺夫函数设计的。针对这一特征,本文选择控制李雅普诺夫函数、控制障碍函数结合二次规划算法来设计带约束的一体化控制器。
文献[30]给出了通过二次规划(QP)结合控制李雅普诺夫函数(CLF)、控制障碍函数(CBF)来处理约束问题的一般方法。
首先给出CLF以及CBF的定义:
考虑一般的仿射非线性系统

(16)


(17)
(18)
(19)

(20)

(21)


(22)

(23)
则就是一个控制障碍函数(CBF)。
本文受文献[30]的启发,为速度子系统设计约束算法。速度子系统可改写为如下紧凑形式:

(24)

该系统需要满足以下三类约束:
(1)硬约束:代表了系统在任何时候都不应被突破的约束条件。对于高超声速飞行器的上升段飞行,约束式(12)、(14)是不可突破的硬约束;
(2)软约束:只有当硬约束满足时,软约束才可能满足。对于速度子系统来说,其目的就在于追踪速度期望,即驱动-→0;
(3)输入约束:这项约束描述了系统能被容许的输入范围。对于该子系统,输入需满足约束式(13)。
本文通过将硬约束、软约束、输入约束分别转换为CBF、CLF,并将其与二次规划算法相结合,建立基于CLF-CBF的QP算法,得到满足高超声速飞行器上升段过程约束的制导控制一体化控制器。
(1)转化软约束为CLF
本文首先从将软约束转化为CLF开始设计。软约束条件可以改写为基于速度追踪误差的形式::=-→0。
(25)
于是,有

(26)
式中:>0。
由式(24)~(25)可知

(27)
因此可以通过设计控制器来满足式(26)。由式(1)及式(27),可得到满足条件的动态逆控制器

(28)
式中:=05>0为增益系数。当系统状态处于合理空间内时,可知coscos≠0,此时不存在奇异的情况。
于是,由式(25)~(26)便可得描述为CLF的软约束:

(29)
式中:≥0代表软约束的松弛因子。需要指出的是,正是这个松弛因子使得该约束成为一个软约束,即若设置=0就意味着该约束将成为一个“硬”约束:它将强制以速率指数收敛。
(2)转化硬约束为CBF
该步骤的目的在于建立不等式约束使得硬约束条件必定能够满足。本文考虑的过程约束中有两个硬约束条件:式(12)及式(14),它们可以分别转化为两个连续可微的约束函数

(30)

(31)
由于约束(12)与约束(14)在该步骤的设计过程类似,本文仅针对约束(12)的设计过程展开说明。
考虑控制障碍函数
(32)
式(32)具有如下两个重要的性质:

对式(32)求导,可得


(33)
于是,可以设计反馈控制律
(34)

最终,硬约束(12)被转换为了CBF的形式:
(35)
由于该条件本身是一个硬约束,因此在式(35)中并没有引入松弛因子。
约束(14)的转化步骤与此类似,不再赘述。取

(36)
可将硬约束(11)转化为:
(37)
(3)输入约束
最后考虑的是输入约束问题。该约束可以转化为如下的不等式形式:
0≤≤max
(38)
考虑到有可能存在输入约束与硬约束相冲突的情况,因此有必要对这种情况进行分析。由于本文研究的高超声速飞行器采用零侧滑机动,因此式(1)可简化为

(39)
(4)基于CLF-CBF QP的约束控制器


(40)
式中:矩阵,由软约束条件式(29)解得,
矩阵1,1由硬约束条件式(35)解得,
矩阵2,2由硬约束条件式(37)解得,
矩阵,由输入约束式(38)解得,
矩阵与则需要通过分析QP的损失函数来确定。分析损失函数是平衡CLF能够实现控制目标与松弛因子(目的在于保证CLF-CBF QP的有解性与连续性)之间矛盾的一种方法。
本文在构建CLF时,通过将输入设置为
(41)

(42)
由此可确定QP中的损失函数形式,可得

式中:表示松弛因子的惩罚度。
2)子系统2
该系统的控制目标为使得,能够分别跟踪上各自的期望,而无需考虑约束问题,因此可直接通过反步动态逆控制进行设计。该系统可视为四阶级联系统,因此可分为以下四步进行设计。

不同于子系统1中输入以线性形式出现,该方程中的输入以三角函数的形式出现在了动态方程中,直接利用动态逆方法变得不再便捷。为了解决这个问题,本文从李雅普诺夫稳定性的角度上对该一阶系统进行设计。
取Lyapunov函数,如式(43)所示:
(43)
式中:=-,为期望横移;=-,为期望高度。
对式(43)求导,可得

(44)

(45)
(46)
式中:,均为大于零的增益系数。
与第1步相同,在该系统中输入同样以三角函数的形式出现,因此仍然利用Lyapunov稳定性思想进行设计。
取Lyapunov函数,如式(47)所示:
(47)
对式(47)求导,可得

(48)
(49)
(50)
则式(45)~(46)可改写为如下式所示:
(51)
对式(51)求导,可得
(52)
式中:



(53)

(54)
接着,对式(52)进行移项,可得

(55)
因此,可设计倾侧角的期望为

(56)
此时,对式(54)进行移项,并将式(56)代入,即可将期望攻角设计为


(57)
第3步:针对如式(4)所示的一阶系统进行设计。该系统以,为输入,,为输出。
由式(4)可知,不同于前面两级,该级的输入以线性形式出现,且前面的非线性项均不为0。因此可以直接采用动态逆思想对该级进行设计,易得期望滚转角速率以及期望俯仰角速率如下

(58)

(59)
式中:以及均为大于零的增益系数。

(60)
式中:,为时间常数;,为一阶滤波器的输出。
则式(58)~(59)可改写为:

(61)

(62)
第4步:针对如式(5)所示的一阶系统进行设计。该系统以,为输入,,为输出,得到的是整个子系统2的输入。
同样,由式(5)可知,在该级中输入仍然以线性方式出现,且其乘积项不为零,因此可由动态逆思想,直接进行控制器设计,控制器如下式所示:

(63)

(64)
式中:以及均为大于零的增益系数。

(65)
式中:,为时间常数;,为一阶滤波器的输出。
则式(63)~(64)可改写为:

(66)

(67)
3)子系统3
该系统的控制目标为保证飞行器的零侧滑飞行模式。该系统可视为二阶级联系统,因此可以分两步进行设计。
第1步:针对如式(6)所示的一阶系统进行设计,该系统以为输入,为输出。
利用动态逆思想,由式(6)易得的期望动态为:

(68)
式中:为大于零的增益系数;为期望侧滑角,由于高超声速飞行器采用零侧滑机动,因此有=0。此时,若能够跟踪,则就能跟踪到。
第2步:针对如式(7)所示的一阶系统进行设计,该系统以为输入,为输出。
再一次利用动态逆思想,由式(7)即可得

(69)
式中:为大于零的增益系数。


(70)
式中:为时间常数;为一阶滤波器的输出。
则式(69)可改写为:

(71)
至此,子系统3设计完毕。
由式(40)以及式(66)~(67)、(71)便得到了整个系统的控制律。

(72)
不难发现,一体化控制律中利用了未知扰动的信息,而这类信息往往是无法被直接测量的。因此,本文采用非线性干扰观测器对其进行估计,从而使一体化控制律具有可行性。
2.2 观测器设计
随着扰动估计和补偿技术的发展,不确定系统的鲁棒控制器设计变得更加便捷。而干扰观测器(DO)作为一种可以根据问题需要处理不确定性估计的技术更是广为人知。正是由于其便捷有效的优势,不断有文献基于DO提出各种各样的控制器设计,如文献[31-32]。为了增强非线性动态逆控制的抗干扰能力以及应对不确定气动参数的鲁棒性,文献[33]提出了一种适用于飞行器动态逆控制的非线性干扰观测器。
式(1)~(7)所示的高超声速飞行器动态方程可以写成如下所示的一般仿射非线性形式:
(73)
式中:
非线性干扰观测器可设计为如下形式:

(74)


(75)
本文选取如下形式的():
(76)
则有

(77)
由式(74)、(76)和(77),可得观测器误差动态为

(78)

在得到干扰估计值之后,将这些估计值代入到式(72)中,便能得到可行的一体化控制律,如下式所示:

(79)
3 稳定性证明
针对上升段高超声速飞行器系统(1)~(7),若其具有有界的初始条件以及()∈Ω, Ω是一个足够大且取值合理的紧集,则在假设1~3下,本文设计的制导与控制一体化控制器(79),具有以下结论:
(1)当→∞时,系统各状态跟踪误差()-(),=1,2,…,11会收敛到原点的一个邻域内。
(2)总是存在不变集Ω,使得对于所有的≥0,(0)∈Ω⟹()∈Ω。
该定理的证明分为两部分进行。
(1)证明状态量追踪误差均能收敛到原点的一个邻域内。
同推导过程相似,证明也采用分步进行的方式。其中,速度子系统约束控制器的稳定性已由定理1说明,其证明可参考文献[30],本文不再赘述;而反步动态逆控制器的稳定性证明过程中存在大量重复工作,为保证文章的可读性,本文仅针对角速率子系统的证明进行展开,其余动态的证明与此类似,不再展开。
定义如下Lyapunov函数:
对,=,,求导,可得

(80)

(81)

从而可知

(82)
由的定义、观测器误差有界以及一阶滤波器误差有界可知
(83)

由式(83)可知,追踪误差最终会收敛到原点的一个领域内,即角速率子系统可实现状态稳定,且追踪误差有界。
基于角速率子系统的证明结论,便可展开对其余子系统的证明,证明思路均与此类似,为节约篇幅,不再赘述。需要注意的是,在进行分级稳定性证明的过程中,均需要考虑前级跟踪误差的影响。为得出系统输出跟踪误差有界的结论,现对输出,进行展开证明。
定义Lyapunov函数如下:
对,=,求导,可得


(84)

从而可知

(85)
由的定义以及式(85),可知
(86)

由式(86)可知,追踪误差最终会收敛到原点的一个邻域内,,稳定。
综上,当→∞时,系统各状态跟踪误差()-(),=1,2,…,11会收敛到原点的一个邻域内。
(2)证明总是存在不变集Ω,使得对于所有的≥0,(0)∈Ω⟹()∈Ω。
由,=1,2,…,11有界以及∈Ω,可定义
Ω={,=1,2,…,11|≤}
(87)

对求导,可得
(88)

于是可得

(89)
假设初值(0)均属于集合Ω,且(0)≠。令式(82)小于等于,即
(90)
于是可得
(91)
易知(1-e- )(-(0)e- )关于时间单调增,其最大值为
(92)
因此,对于所有的≥0,若
(93)
则不等式(89)成立。
若(0)=,根据式(93)可知,
(94)
当=0以及(0)=时,不等式(89)自然成立。当>0时,则由不等式(94),同样可以得到≥的结论。因此,对于所有的≥0,若有≥以及(0)∈Ω,则不等式(93)成立,即

(95)
因此,Ω是一个不变集。且对于任意给定的紧集Ω,总可以通过设计合适的参数使得Ω是一个不变集。
由∈Ω可知的有界性,又有界,于是有界,且收敛于紧集Ω:

(96)
因为Ω被假设为了一个足够大的紧集,所以其可大到足以包括Ω,即Ω⊂Ω。所以,若有≥,则所有于=0时刻起始于Ω的状态量(),(),…,(),对于所有的>0,都会留在集合Ω内,即Ω是一个不变集。
4 仿真校验
为了验证本文提出的制导控制一体化控制器能够有效处理高超声速飞行器上升段约束制导控制问题,本文利用文献[21]中给出的完整的高超声速飞行器模型,进行了仿真验证。
采用如下的指数函数作为系统的输出期望:
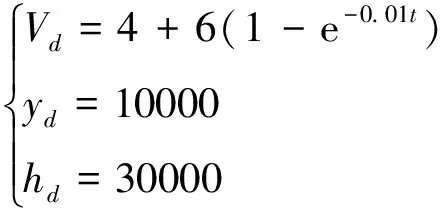
该组输出期望表示了飞行器在上升段要实现由马赫数4提速至马赫数10,横向轨迹纠偏10000 m以及高度从12000 m爬升至30000 m的要求。同时需要注意的是,由于高超声速飞行器采用零侧滑机动模式,因此应有期望侧滑角=0。
过程约束边界取值如下:

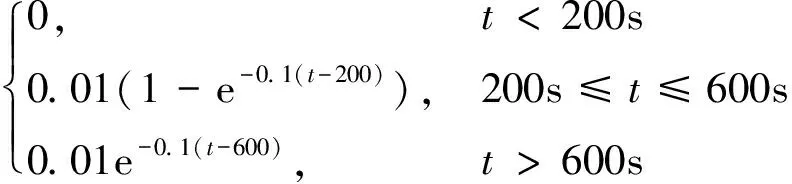
,,均取如下函数:
仿真中的飞行器参数、控制器参数、观测器参数以及状态量初值见表1~4。

表1 飞行器参数Table 1 Parameters used in the simulation
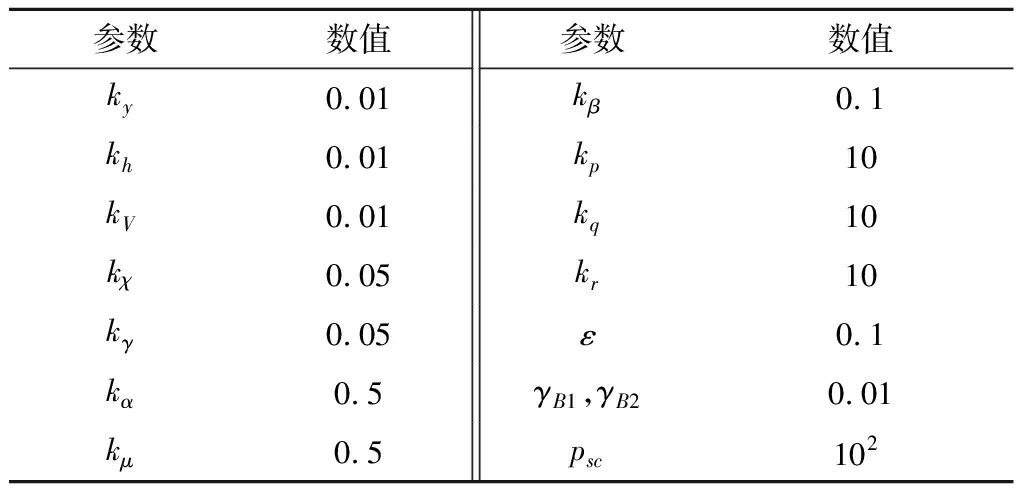
表2 控制器参数Table 2 Parameters for the controller
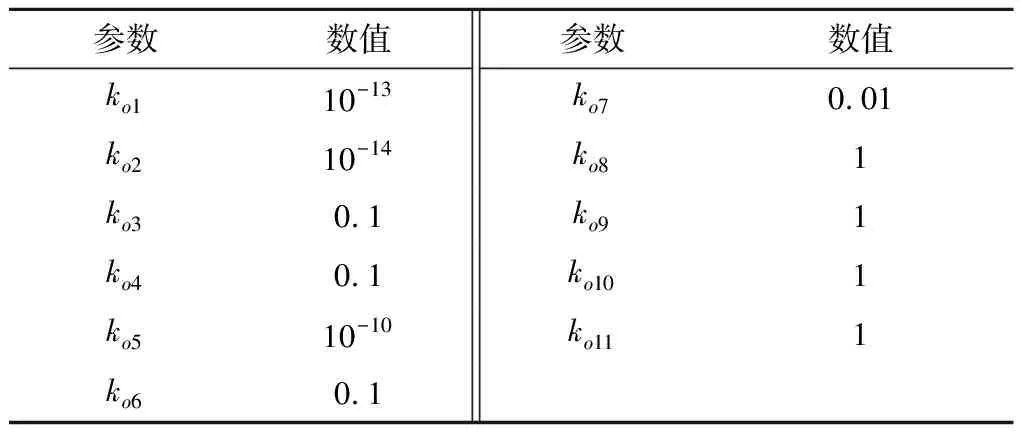
表3 观测器参数Table 3 Parameter for observer
为了模拟高超声速飞行器上升段时,飞行器偏离轨道且有继续偏离的趋势,本仿真将初始航迹方位角设置为一个负数。除此以外,各状态量初始值见表4。
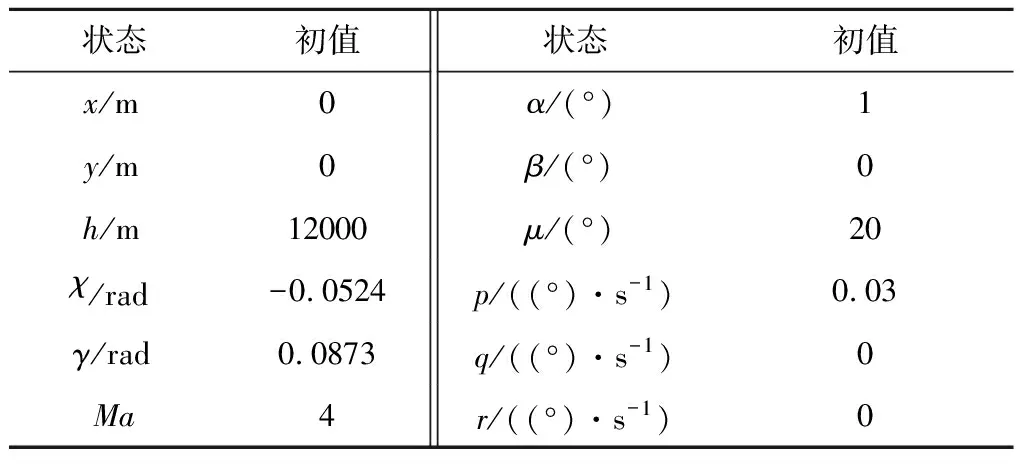
表4 状态量初始值Table 4 Initial values of the state variables
为说明本文提出的约束下制导与控制一体化算法,不仅能够实现飞行器的三维追踪控制,还能保持对过程约束条件的满足,在相同的仿真条件下,本文与文献[15]提出的基于块反步动态逆法的制导控制一体化方法进行对比仿真,以验证本文提出算法在处理过程约束上的优越性。
图2给出了系统输出动态的响应曲线。由图2(a)、2(b)可知,相比于文献[15]所提出的算法,本文所提的带约束的一体化算法在横向移动以及高度追踪的动态性能以及稳态性能方面仅有很小的差
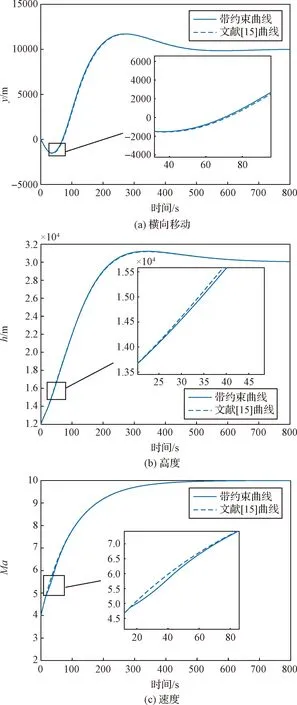
图2 输出动态响应Fig.2 Output dynamic responses
别。而由图2(c)可知,由于约束算法作用在速度控制上的效果,速度响应曲线呈现出一个较小的波动,但最终也能够实现速度追踪。
图3给出了飞行器飞行航迹角的动态响应曲线。由图3可知,本文所提算法在动态响应以及稳态误差上与文献[15]具有相近的性能。在响应曲线前段产生的略微偏差,其原因也主要来自于速度变化带来的影响。
图4给出了飞行器气动角的动态响应曲线。从
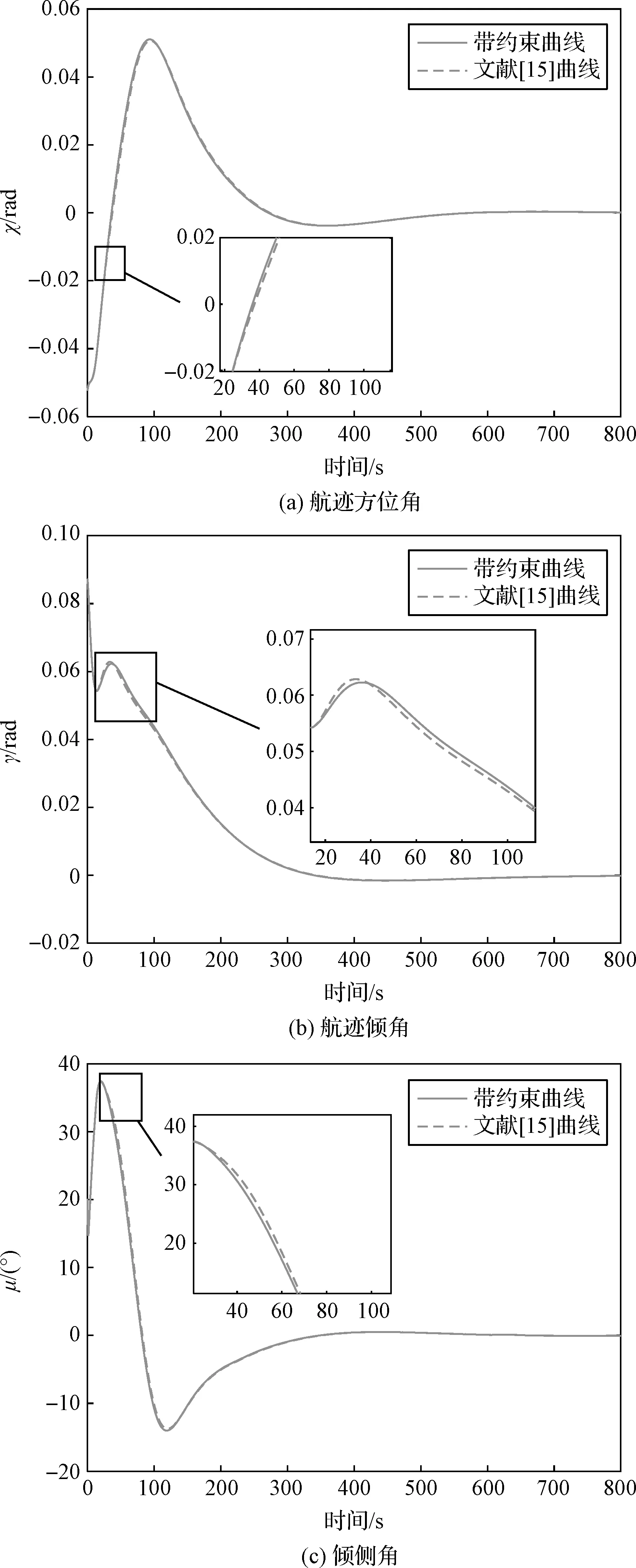
图3 飞行航迹角Fig.3 Flight path angles
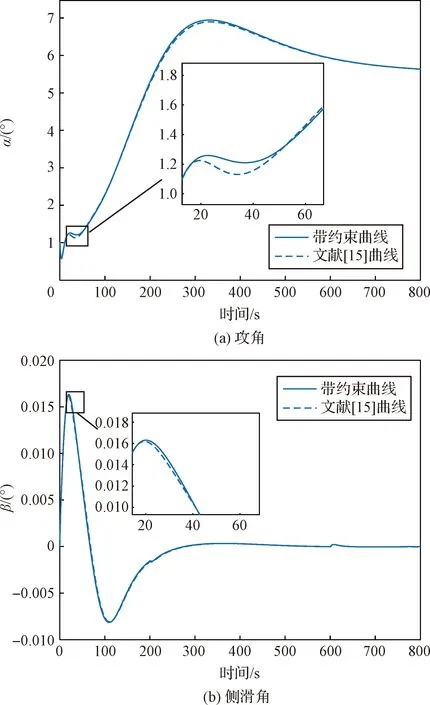
图4 气动角Fig.4 Aerodynamic angle
图4(a)可以看出本文所提的约束一体化算法相比于文献[15]的方法在攻角动态上有细微差别,造成这种细微差别的原因也主要在于速度的影响。由图4(b)可知,和文献[15]一样,本文所提的算法,同样能够使侧滑角始终保持在0附近,仅通过倾侧角实现转弯,保证了飞行器的零侧滑机动。
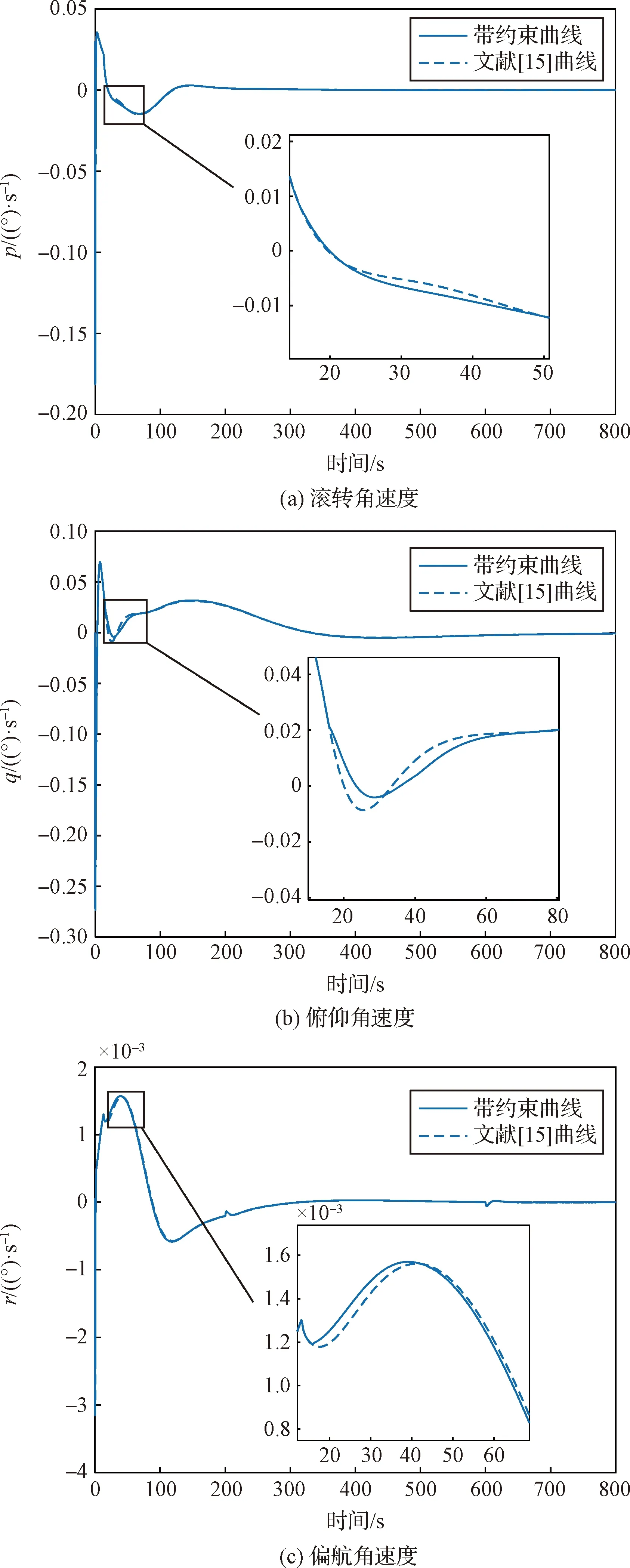
图5 角速度Fig.5 Angular velocity
图5给出了飞行器三轴角速度的响应曲线。三轴角速度在动态响应上均与文献[15]所提方法具有相似的性能,其中以俯仰角速度的区别最为明显,这是由攻角以及速度在动态响应上的区别共同引起的。
图6给出了过程约束情况。由图6(a)可见,文献[15]所提方法并不能有效保证过程约束的满足,而本文提出的方法则能够有效保持对动压的约束。由图6(b)可知,本文提出的算法正是通过对推力的调节,同时实现了速度追踪以及约束满足。由图6(c)可见,系统同时还能实现对弯矩约束的保持。
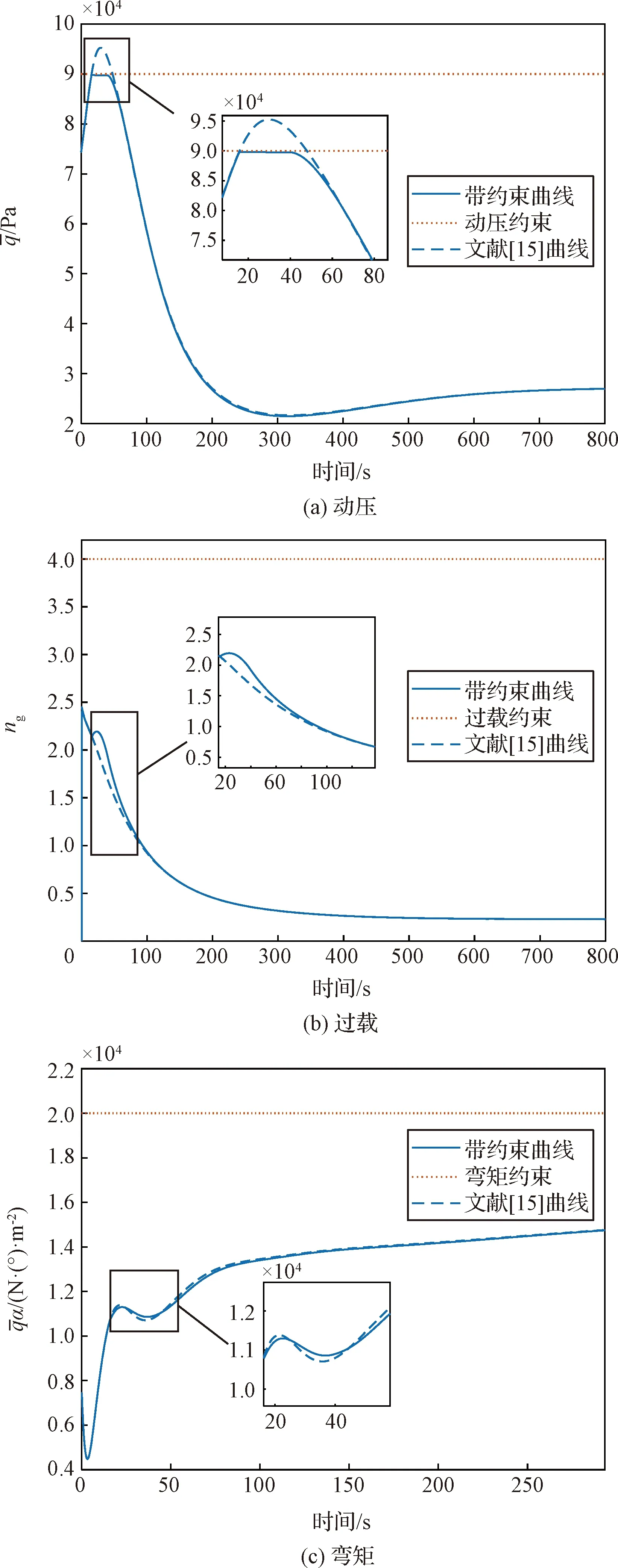
图6 过程约束Fig.6 Path constraints
综上,本文提出的算法,不仅能够实现干扰下的三维制导与控制一体化控制,还能够实现对过程约束的保持,保证了飞行器的安全性。另一方面,本文提出的控制算法,虽然从动态响应曲线上看与文献[15]所提的方法具有相似性,但计算量却要明显多于文献[15]所提算法,因此在计算速度方面要逊色许多。
5 结 论
本文同时考虑了飞行器过程约束以及遭遇外界扰动的情况,设计了一种基于CBF的制导与控制一体化控制器,使得飞行器以三轴力矩以及推力作为输入直接实现对高度、横移以及速度追踪的同时,实现了对过程约束的保持,确保了飞行器的安全性。具体地,首先对过程约束条件进行分析,对速度追踪系统添加CLF-CBF QP算法以同时实现速度追踪以及约束保持。接着,通过组合动态逆以及反步法的方式,设计了一体化控制器,实现标称情况下位置/姿态系统的追踪,并且添加干扰观测器以增强算法的鲁棒性。然后,基于Lyapunov方程对闭环系统进行了详细的稳定性证明,证明了闭环系统的稳定性。通过仿真对比,验证了本文提出的一体化控制器不仅能够实现输出追踪还能实现约束保持。相比于以往只关注于纵向平面或者输出追踪问题的一体化控制研究,本文提出的制导控制一体化控制器还能够实现对约束的保持,从而更具实用性。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2016年9期)2016-11-16 02:02:36
北京航空航天大学学报(2016年7期)2016-11-16 01:51:00
北京航空航天大学学报(2016年4期)2016-02-27 06:32:09
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
太空探索(2014年5期)2014-07-12 09:53:28
太空探索(2014年1期)2014-07-10 13:41:49