
隐身飞机RCS测量与成像方法研究综述
2022-06-08 09:10贾高伟王建峰
国防科技大学学报 2022年3期
贾高伟,阴 鹏,邵 帅,王建峰
(国防科技大学 空天科学学院, 湖南 长沙 410073)
探测与反探测、隐身与反隐身,一直是军事对抗技术发展的主线。隐身飞机的出现,颠覆了传统空战模式,引领了对抗技术的发展。“隐身”已经成为一流战机的必要能力,也是军事强国竞相发展的高端科技[1]。当前,隐身无人机日益受到人们的重视,呈现巨大灵活的应用空间,隐身无人机的发展同样促进了隐身技术的长足进步[2]。飞机隐身化要求设计师在考虑气动、结构、推力等系统的同时,还需高度兼顾隐身设计这一高门槛技术[3]。
一般地,飞机的隐身化包括雷达隐身、红外隐身、射频隐身以及声隐身等[1,4]。本文的研究聚焦于雷达隐身,非特意说明,后文中的隐身均是指雷达隐身。雷达隐身性能与飞机外形和材料相关,其中雷达散射截面积(radar cross section, RCS)是一个重要指标[5-6]。
对飞行器RCS缩减的过程即是飞行器隐身化的过程,其中外形优化十分重要,其机理为通过外形调整,将雷达主要回波反射至非作战方向,从而降低散射回雷达的特征信号。材料隐身也是常用方法,使用样式又可分为吸波结构和吸波涂料,其机理是通过吸波性材料将入射的电磁波转为热能,进而降低散射回雷达的特征信号。
针对雷达特征抑制,飞机隐身化设计的传统设计流程包括[1,7]:
1)利用电磁散射计算软件评估飞机模型的RCS,作为总体设计的依据;
2)制作缩比模型,在室内或者其他干净的电磁空间开展RCS实测,评估隐身性能[8];
3)制作全尺寸飞行器原型系统,开展室外静态测试[9-11];
4)对于全尺寸飞行器系统,开展室外飞行(动态)测试[12]。
在上述过程中,RCS测量是基础性关键技术,从不同的维度看,RCS测量方法可以有诸多的分类。从测量的对象来看,它包括缩比模型飞机测试、全尺寸飞机静态测试、全尺寸飞机动态测试;从测量信号的工作形式看,它可分为时域测试与频域测试;从测量信号的频谱样式看,它可分为点频模式和带宽模式;从电磁波的波前模态看,又可分为近场测量和远场测量。
RCS测量的呈现方式,包括一维曲线形式和二维、三维图像形式。一维曲线是最为经典的表达RCS大小的方式,用于体现某一点频辐照下,沿不同的雷达入射方向测得的飞行器雷达回波强弱;随着雷达波形复杂化,宽带信号在雷达波形中变得常见。图像法是基于转台成像原理[13-14],由宽带信号提供距离向分辨率,由转台旋转积累方位角,形成方位向分辨率,由此得到二维图像。类似地,在通过高度向积累孔径,可以形成三维图像,RCS的成像结果对应于某一积累角度范围。
图像法具有直观、易懂,便于与外形、结构设计相结合的特点。此外,目标的RCS成像可以对飞行器强散射点进行定位,用以对飞行器隐身性能的诊断。应用场景包括隐身飞机的设计、设备集成、出厂验证和日常维护。
关于隐身测量技术的论述,国内已有相关学者进行了总结,肖志河等[5]从飞行器隐身测试评估的角度,介绍了国内外典型的测量技术进展,总结了低散射诊断技术的最新成果;张澎等[9]从隐身飞机不同研制阶段采用不同的RCS测试方法的角度,总结了几种现有测量方式的优劣,并以美国为对象,讨论了RCS近场测试技术应用现状;高超等[10]从近场测量技术发展的角度,总结了近场测量发展历程,综合分析了国内外近场测试研究的进展以及在飞行器RCS测量中的应用实例;柴建忠等[11]从雷达散射截面诊断与评估的角度,讨论了全尺寸飞行器的诊断需求,梳理了近场测量的一般过程和实施方案。
本文围绕隐身飞机RCS测量方法与技术的最新发展,从缩比模型测量、全尺寸目标室外测量、全尺寸室内进场测量的角度,着重分析并梳理相应的测量体系和关键技术,并结合隐身飞机的发展与应用方向,对相关的RCS测量需求与趋势进行总结和分析。
1 缩比模型的测试样式与系统
缩比模型是在飞行器外形设计基本明确的基础上,选择针对性的材料、工艺,完成缩比样机的制造[1]。缩比样机的测量环境,可以分为室外测量和暗室内测量两类。
1.1 室外缩比模型测试
缩比样机测试一般包括缩比模型、支架、转台、信号发射与接收以及信号处理等。室外测试系统一般通过距离门的形式选定某距离区间内的回波[15],以此来较好地屏蔽缩比模型之外的杂波散射。室外缩比模型测试过程容易组织、成本可控,但需考虑外界噪声电平对测试的影响。
1.2 室内缩比模型测试
另一种更为普遍的缩比样机测试,是在微波暗室内完成[16]的。暗室内测量的优势是无外界电磁干扰、杂波少、背景电平低、测量精度高。由于室内空间受限,暗室内测量环境的构建,形成平面波是重要方面。绝对意义上的平面波是不存在的,电磁测量中平面波的定义是指波面内各点的相位差小于22.5°。
室内一般通过反射镜转换的形式将球面波无限逼近平面波。从反射镜的数量看,可以分为单反射镜、双反射镜以及三反射镜等形式。
单镜面反射利用旋转抛物面将放置于焦点的馈源辐射球面波校准为平面波,具有结构简单、成本较低的特点,适用于高频测量,由于焦距相对较短,导致静区幅度锥削较大,一般采用偏馈结构,交叉极化较高,如图1所示。
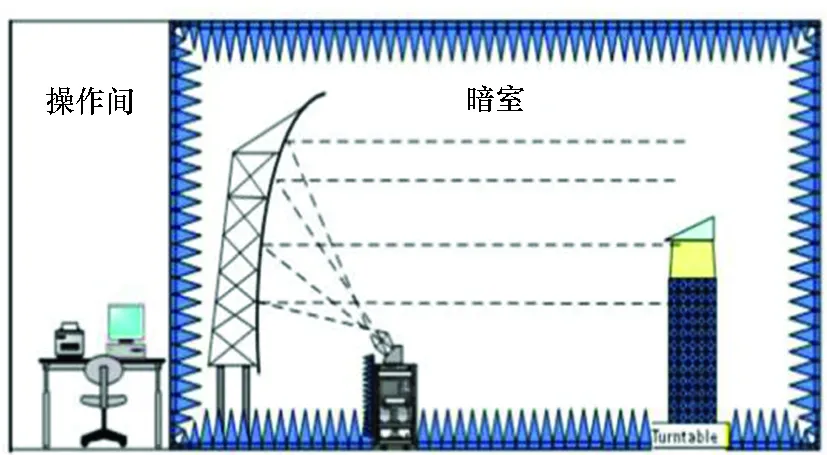
(a) 单反射面紧缩场结构(a) Compact range based on single surface
(b) MIT林肯实验室单抛物面紧缩场(b) Single surface compact range in MIT图1 单反射面紧缩场示意图及实物图Fig.1 Schematic diagram and real system of single surface compact range
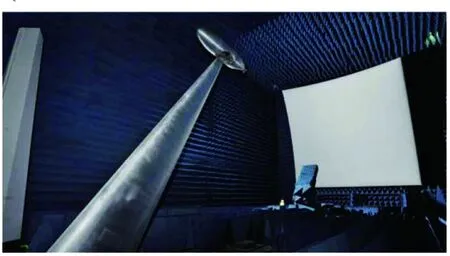
双反射镜紧缩场方面,卡塞格伦双面紧缩场是经典布局。副面先为旋转双曲面,主面为旋转抛物面。副面先将馈源发出的球面波校准为由虚源发出的球面波,主面再将其校准为平面波,可以获得较大的等效焦径比[12]。双柱面反射镜紧缩场是另一种常见布局,它采用两个弯曲面相垂直的抛物面,副面校准一维波前为柱面波,主面再校准另一维波前为平面波,具有等效焦距较长,交叉极化较低等优势。
图2展示了两种紧缩场工作示意图。图3展示了雷神公司双柱面紧缩场的实际结构图以及实景图[17]。
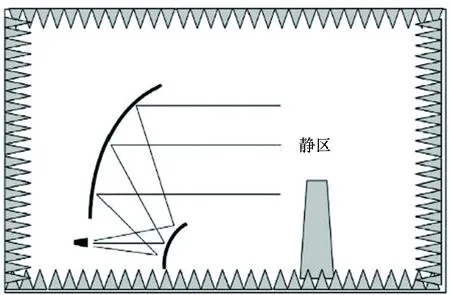
(a) 卡塞格伦双面紧缩场(a) Cassegrain dual reflector compact range
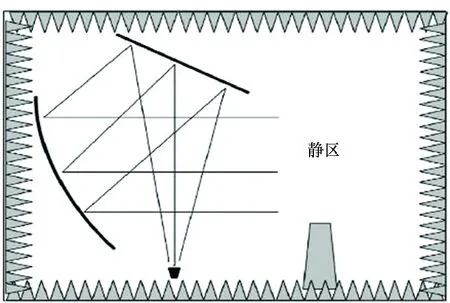
(b) 双圆柱面紧缩场(b) Dual cylindrical reflector compact range图2 不同的双反射面紧缩场示意图Fig.2 Different dual reflector compact range

(a)双柱面紧缩场系统结构(a) Geometric diagram of dual reflector compact range
(b) 双柱面紧缩场实物图(b) Real system of dual reflector compact range图3 雷神公司双柱面紧缩场实物图Fig.3 Real compact range of Raytheon company
三反射镜紧缩场一般由一个标准面主镜、两个赋形面的副反射镜组成。其优势在于通过赋形副反射镜控制波束重新赋形,增大静区利用率[12]。
1.3 缩比测试的特点总结
综合来看,缩比模型测量的优势在于:可以准确提取真实目标在电磁波照射下的散射模型,具有实施方便、可重复验证、效率高、测量成本低等特点。
当然,它也存在不足之处:
1)复合材料的广泛使用,使得传统的缩比等效测试模型(机身材料为良导体)不再适用。
2)飞行器细微结构处缩比模型的加工精度会引入明显的测量误差。
参考美国研发F22的过程,就存在缩比模型与实际产品RCS不一致的情况,这导致了较大的时间、物力的损失。
2 全尺寸室外测试场
美国在研发飞行飞机的过程中,设计和建造了多个大型的室外测试场,用于开展静态和动态RCS测试。
2.1 美国国家RCS测量设施
美国国家RCS测量设施(national RCS test facility, NRTF)是美国空军在新墨西哥州霍夫曼空军基地开展全尺寸飞机静态RCS测量的重要设施。它包含两个独立的子系统——Mainsite主站和先进测量系统(radar target scatter advanced measurement system, RAMS)。Mainsite主站测量频率覆盖0.14~18 GHz、34~36 GHz、94 GHz,能够对全尺寸飞机目标提供近实时的RCS曲线测量以及逆合成孔径雷达(inverse synthetic aperture radar, ISAR)成像[18-20]。RAMS距离Mainsite主站约56 km,适用于更低的RCS目标单站测量,其测量频率范围0.12~18 GHz,同样支持近实时的RCS曲线测量以及ISAR成像。该系统为美国一系列的飞机、导弹提供RCS和天线性能测试,如图4所示。

(a) 天线支架(a) Antenna support
(b) 不同的测量天线(b) Different antenna measurement图4 美国国家RCS测量场Fig.4 Test field of NRTF
2.2 海伦达尔RCS测试场
海伦达尔(Helendale)RCS测试场由洛克希德·马丁公司始建于20世纪80年代,它由一座旧的机场改建而来,地处美国加利福尼亚州Palmdale。海伦达尔测试场是美国最先进的测试场之一,采用低散射支架技术和精确定标技术,可以充分保证测试结果的精度[21]。美国SPC公司为其提供了测试雷达,该测试场21 m高的铁塔上布置了很多天线(120 MHz~18 GHz,以及35 GHz附近点频),确保了测试频率的覆盖率,这些天线可以上下移动以适应不同的观测视角,如图5所示。

(a) 主测试场(a) Main test field

(b) 测试场全貌(b) Overview of test site图5 Helendale RCS测试场Fig.5 RCS test field of Helendale
2.3 泰昂RCS测试场
泰昂(Tejon)测试场由诺普洛斯·格鲁曼公司始建于20世纪80年代,位于加利福尼亚州的Antelope山谷,位置偏僻,总面积超过5.6 km2,测试场共4个测试区[21],由2个旧测试系统共用一个天线阵列,2个新建的测试系统共用一个天线阵列。其天线高度可调,场地中有多个具有低散射特性的支架及旋转机构,如图6所示。支持ISAR成像功能,测量频率至少覆盖145 MHz~18 GHz。

(a) 测试场全貌(a) Overview of test site

(b) 测量支架(b) Test pylon图6 Tejon RCS测试场Fig.6 RCS test field of Tejon
2.4 格雷巴特RCS测试场
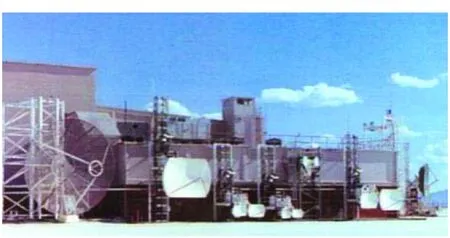
格雷巴特(Gray Butte)RCS测试场是由旧机场改造形成的,原本归麦道技术公司所有,位于加利福尼亚州旧金山附近的Palmdale。格雷巴特测试场启用于20世纪60年代,是莫哈维沙漠里最早的RCS测试场[21]之一。该测试场有一个移动的作业仓,可以在铁轨上移动,如图7所示。内有起重机,将目标放置在低散射支架上后,作业仓移离主支架。其测量频率覆盖145 MHz~18 GHz,以及24~35 GHz范围内的点频。

(a) 可移动的作业仓(a) Movable operation bin
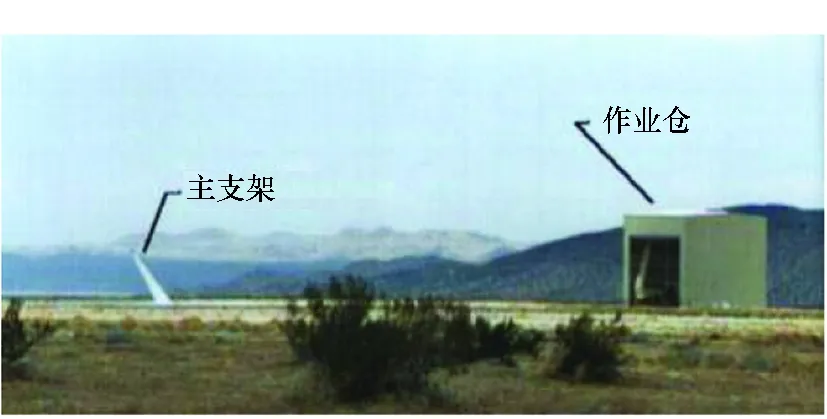
(b) 作业仓移离主支架(b) Operation bin away from the pylon图7 Gray Butte RCS测试场Fig.7 RCS test field of Gray Butte
2.5 波德曼RCS测试场
波德曼(Boardman)RCS测试场是波音公司的大型室外测试场,位于俄勒冈州波德曼以西的一个偏僻区域。它的构造与格雷巴特RCS测试场相似,同样有一个飞机棚,可在轨道上移动,在测试时离开支架。雷达包含多个波段的天线,从而保证频率覆盖范围。该试验场有多个不同的支架,如图8所示。支持对F15、F18、科特曼直升机等多类飞机的RCS测试[20-21]。

(a) 测试场俯视图(a) Top view of test site

(b) 各类测量飞机(b) Different aircrafts for measurement图8 波音Boardman RCS测试场Fig.8 Boardman RCS test filed of Boeing company
2.6 全尺寸外场测试的特点总结
综合来看,全尺寸外场测试中常见的工程问题包括:
1)金属支架的设计与使用。为确保可以提供更大的承重,并更为精确地控制被测飞行器的姿态,需要选择金属支架,并考虑支架旋转机构与测试模型的结合。为保证测试精度,一般要求金属支架较被测目标RCS要低两个量级;同时确保连接区域有足够低的RCS,可将支架的转顶置于被测模型的内部,并设计过渡外形以保持局部区域的连续性。
2)降低环境对测量精度的影响。大型外场一般选址于人烟稀少的地区,目标与地面之间的多次散射成为主要影响量,必须予以抑制。一般可在地面铺设吸波材料,但这一方法因铺设方式、位置以及吸波材料的不同,会导致测试背景的不一致性。一种潜在的办法是增高金属支架的高度,并通过背景矢量相减、软硬件距离门等方式抑制背景杂波。
3)定标方式选择与成本控制。对于室外测试中的空中动态飞行试验,重复测试的一致性、定标体的设置、目标的飞行航迹规划、环境杂波的消除,以及雷达对低RCS目标的探测性能等因素都需要综合考虑,并制定最后的执行方案。全尺寸飞机动态飞行测试只能在飞机原理样机研制出来后开展,试验周期长,一般用于出厂或交付验收。
3 全尺寸近场测试理论与系统
3.1 全尺寸近场测试的需求
结合第1.3节、第2.6节中对于缩比模型测试以及全尺寸外场测试特点的总结,一种不依赖于微波暗室和大型测试外场保障[22-25],且具备与紧缩场暗室相当的测量精度,可以大大提高隐身飞机设计、制造、研制周期的新型测量手段——全尺寸近场测试,呈现出日益明确的应用需求。
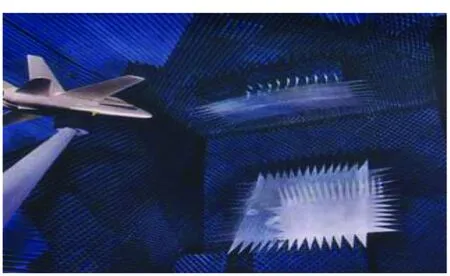
图9展示了对两个典型战机开展近场RCS测量与诊断的试验,分别是瑞典的萨博战斗机[26]和F35战斗机[21,27-28]。萨博战斗机在室外开展近场测量,而F35则在室内开展近场测量,需要说明的是,F35的近场测量条件并不像微波暗室那么苛刻,只需在部分区域布置吸波结构即可。

(a) SAAB战斗机的室外近场测试(a) Outdoor near field test of SAAB fighter jet
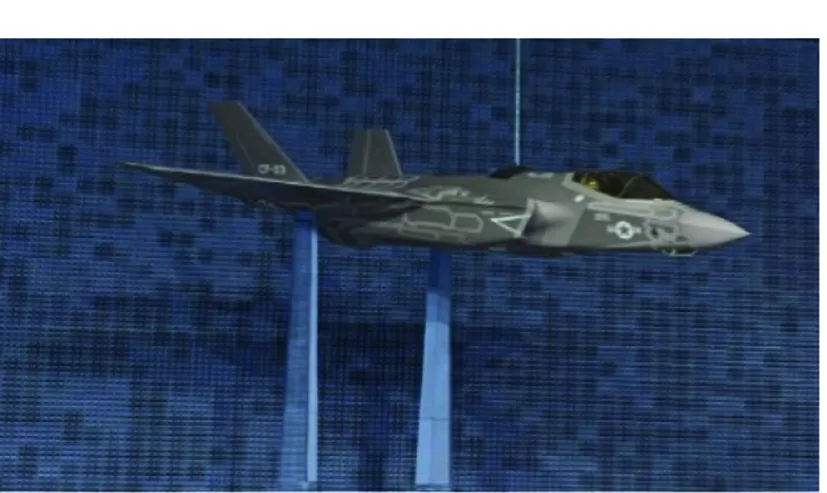
(b) F35战斗机的验证性测试环境(b) Acceptance test facility of F35 fighter jet图9 近场测试对不同战机的应用Fig.9 Near-filed RCS test for different fighter jets
近场测试中的扫描样式比较灵活,包括平面扫描、柱面扫描、球面扫描、一维线阵扫描等[29-30]。一维线阵扫描又可分为水平线性轨迹、垂直线性轨迹以及目标沿方位向旋转(收发装置不动)等。针对不同的扫描样式,调整待测飞行器的方位/俯仰姿态角,可以得到飞行器多方位的RCS测量值[31]。
近场测试的核心技术是将近场测量数据转换(亦称外推)为远场RCS,一般可分为两种技术路线:基于成像原理的外推技术和基于成像结果的外推技术。
3.2 基于成像原理的近远场转换
理论计算和试验测试表明目标散射中心是目标在高频区的基本特征:即在高频区,目标的总电磁散射可以有多个散射中心来表征[24-25,32]。近场测量技术的基本原理是假设目标散射信号是多散射点模型,且目标的点散布函数在一定角度范围内不受照射条件变化的影响,这是高频区目标的客观特性。需要说明的是,该假设下的测量结果忽略了散射点之间的影响,但实践表明,对于复杂目标的RCS统计值,它依旧是精确的,只是在RCS估计的峰值处有所差异[24]。

(1)
(2)
上述处理过程基于合成孔径成像理论,但不需要进行成像处理,通过理论建模,建立了近场测试值与远场RCS之间的解析关系式,减小了计算量。该方向的研究,以美国LaHaie的研究团队影响较大[11,33]。对于该理论体系,国内高超等,基于LaHaie的理论,推导得到了柱面、平面以及球面扫描模式的近远场变换方法[34]。
对于该类近场-远场外推技术,结合不同的扫描方式,试验系统有不同的配置和要求。从公开资料看,金属球、飞机模型或者部件等小型目标的散射远场RCS评估是易于开展组织的,试验系统的布置也相对简单[35]。关于大型全尺寸飞机的近场-远场外推应用的公开报道较少。
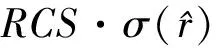
3.3 基于成像结果的近远场转换
图10展示了基于成像结果的RCS外推基本流程。以ISAR或者其他二维形式的成像模式为例,以目标中心为原点建立极坐标系,某一散射点的RCS可以表示为σ(ρ,φ),ρ为目标相关圆心距离,φ为角度。一般地,成像过程可以表述为:
(3)
其中,f为辐射频率,θ为成像积累角,EF(f,θ)为远场回波数据,ξ(f,θ,ρ,φ)为成像因子。由式(3)可知,像σ(ρ,φ)与回波EF(f,θ)之间满足傅里叶变换关系[17,36],即σ(ρ,φ)⟺EF(f,θ)。
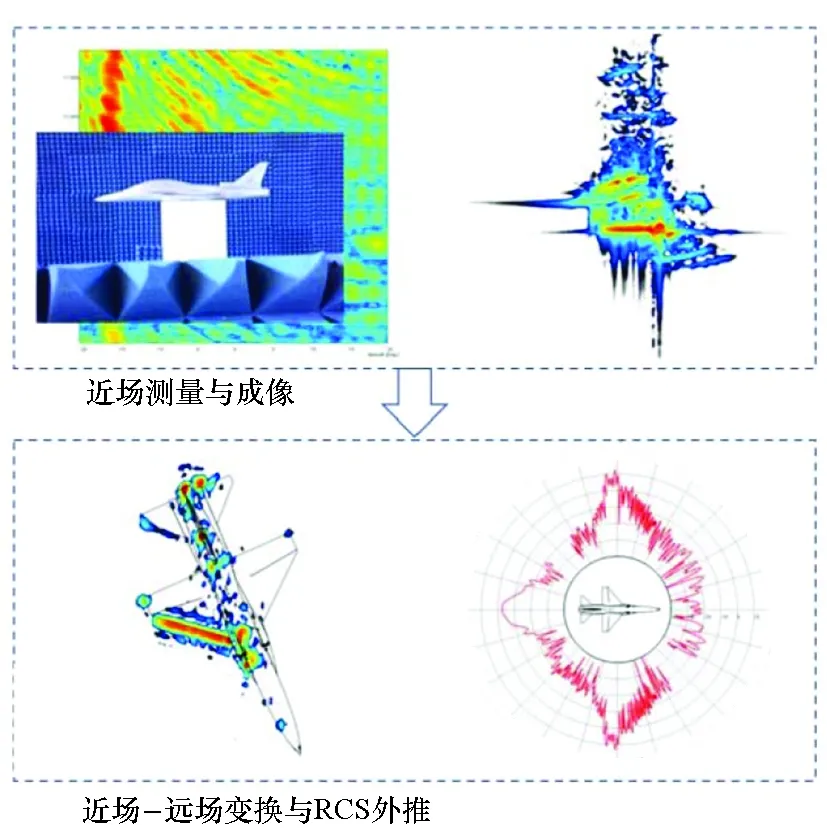
图10 基于成像过程的RCS外推Fig.10 Schematic diagram of RCS transform
在近场情况下,可以通过近场回波数据EN(f,θ)得到目标的像σ(ρ,φ),这样通过像σ(ρ,φ)就建立了近场回波与远场回波之间的联系。
由上述内容可知,基于成像结果的近远场转换思路明晰,易于处理,但难点在于如何获取高精度的近场成像结果σ(ρ,φ)。相应的关键步骤一般包括:
1)必须进行球面波前(相位)校正,以消除散焦和位置失真[37-38];
2)探测天线与目标不宜太近,避免目标中心点与边缘点对应的能量差异太大,超出了系统动态范围;
3)理论上假设了辐照源天线为各向同性,这在实际中是难以满足的,应当考虑天线方向图的影响[33,39-41]。
德国Vaupel与Eibert团队基于层析SAR成像,并通过远场外推,得到了米格29模型的成像结果及其RCS[17],如图11所示。
(a) HH极化(a) HH polarization (b) VV极化(b) VV polarization 图11 米格29模型成像显示HH极化和VV极化Fig.11 The SAR imaging results of Mig29 scale model HH polarization and VV polarization
李南京等[42-44]利用转台模式下的测量回波进行了成像处理,得到了共型天线的RCS值,凸显了基于图像的RCS测量方法在干扰环境下具有测量能力[36]。廖可非等[45-46]、张晓玲等[47]详细推导了三维SAR的近场波数域成像方法,阐述了基于三维SAR成像的RCS近场变换原理,得到了RCS测量值。廖可非等[48-49]考虑到散射点RCS随方位角变化,提出了基于多个子阵列分段处理并进行RCS拼接的方法。
根据成像中提高分辨率以及利于散射点提取的思路,Larsson提出了基于压缩感知技术与ISAR成像结合的方式,提高散射点提取精度[50]。Benoudiba-Campanini等基于压缩感知和三维成像技术,获取了圆锥体不同部位RCS受损状态评估[51]。Benoudiba-Campanini等提出了基于正则化分解的方法,用于对SAR图像解译,以提升RCS测量精度[52]。
RCS成像的另一个优势是提供诊断功能,用于确定和定位飞行器部件对整体散射的贡献[53-54]。这是飞行器可视化设计的重要组成,可以与气动、结构设计一起,构成可视化多学科优化的基础。
3.4 典型的可用于近场测试的集成系统
3.4.1 意大利IDS公司RCSMS近场测量系统
RCS测试系统(RCS measurement system, RCSMS)主要由射频和天线、天线定位器、目标定位器、采集控制软件和后处理软件组成,由矢量网络分析仪和专用的雷达天线组成基本的电磁波收发系统。该系统辐射波形为线性调频连续波,辐射功率大于10 W, 最小可感知RCS为-60 dBm2(35 m测量距离,在L、S、C、X波段),工作频繁覆盖1~40 GHz,支持全极化测量,距离测量范围从数分米到数百米,最高距离分辨率5 cm。使用球面波补偿将近场测量值转换为远场,支持RCS测量以及ISAR成像[55]。图12展示了该系统的工作示意图。

(a) 飞机移动测量模式(a) Measurement type of aircraft movement

(b) 飞机静置测量模式(b) Measurement type of aircraft standing图12 RCSMS测量模式示意图Fig.12 Schematic diagram of RCSMS facility
3.4.2 美国StarDynamics公司BlueMax现场测量系统
BlueMax G6由StarDynamics公司开发研制,可固定在卡车或导轨上进行二维扫描,以满足室内、室外、静态、动态等多种测量要求。该系统采用统一的射频架构,支持多频段覆盖。最高脉冲重复频率(pulse repetition frequency, PRF)可达2 MHz,支持多样距离波门、多通道接收、全极化测量与校准。该系统频率覆盖0.1~18 GHz, 接收测量灵敏度-85 dBm(接收噪声带宽100 MHz时)。适用于数据吞吐量大或采样率要求高的测试情况[56]。图13展示了该系统的基本样式与组成。

(a) 车载测量系统(a) Measurement system mounted on a truck

(b) 测量系统主要构成(b) Main parts of measurement system图13 BlueMax G6近场测量系统Fig.13 Near field test facility of BuleMax G6
3.4.3 美国SPC公司的MKV测量雷达系统
SPC公司长期致力于测量雷达的研发与服务,该公司研制的MK系列雷达在美国多个测量场得到应用(包括诺普洛斯·格鲁晨公司以及洛克希德·马丁公司的RCS测量系统、美国空军诊断成像雷达等)。当前最新的MKVe系统采用步进频体制,支持多频率、超宽带、相参测量,能够进行SAR与ISAR成像,频率覆盖范围50 MHz~100 GHz, 能够跟踪动态目标,是一种先进的高性能测量系统[57]。
4 发展趋势分析
在隐身飞机RCS测量领域,测量精度的提高、测量成本的控制、测量时间的缩短、测量空间的简化,一直是人们努力的方向。结合前文的阐述,梳理总结隐身飞机测量方法的相关发展趋势为:
1)适用于全尺寸无人机的更高精度RCS测量技术。未来的隐身战机将朝无人化、全频段极低RCS[58]、多功能集成等方向发展,隐身无人机的设计、集成、测试环境等均对现有的RCS测量方法与设备提出了新的要求。考虑到无人机成本较低,结构较有人机简化,模型样机制作更易实现,但对研制周期、系统成本以及测量精度有更高要求。全尺寸无人机的高精度RCS测量[59]在整体设计流程中会更早应用,并发挥重要作用。因而针对全尺寸无人机,低成本、高效率、高精度地开展RCS测量变得十分迫切。
2)适用于全尺寸飞机的近场实时成像诊断技术。除了用于飞机的隐身设计,RCS测量对隐身飞机的维护、保养以及载荷集成同样至关重要。具有二维或者三维成像能力的RCS测量技术能够准确地定位和评估散射源,对于快速定位飞机隐身能力破损点,评估隐身材料维修状态具有重要意义。同时,基于隐身平台的电磁载荷装载,天线的安装与透波材料选取与应用是关键步骤,基于近场成像技术的RCS测量能够直观、量化地评估集成效果。
3)近场RCS测量精度与速度的进一步提高。近场测量已展现出成本低、周期短、对场地要求低等优势,当前常用的近场测量的前提是基于目标的点散射模型。该模型忽略了各散射点之间的影响,物理上忽略了蠕动波等影响[53,60],随着隐身频段的拓展,在低频波段或者当目标存在大量结构细节时,如何利用近场测量方式得到高精度RCS测量值是值得持续深入研究的问题。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
China’s foreign Trade(2021年6期)2021-12-26
成都信息工程大学学报(2021年6期)2021-02-12
物联网技术(2020年5期)2020-06-11
电子制作(2018年2期)2018-04-18
现代电子技术(2018年7期)2018-04-04
汽车与新动力(2017年3期)2017-06-29
中华奇石(2015年7期)2015-07-09
中华奇石(2015年5期)2015-07-09
小朋友·快乐手工(2015年5期)2015-06-06
